
工业机器人离线编程(ABB) 工业机器人技术试卷13.pdf

文库****品店

1/1
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
工业机器人离线编程(ABB) 工业机器人技术试卷13.pdf
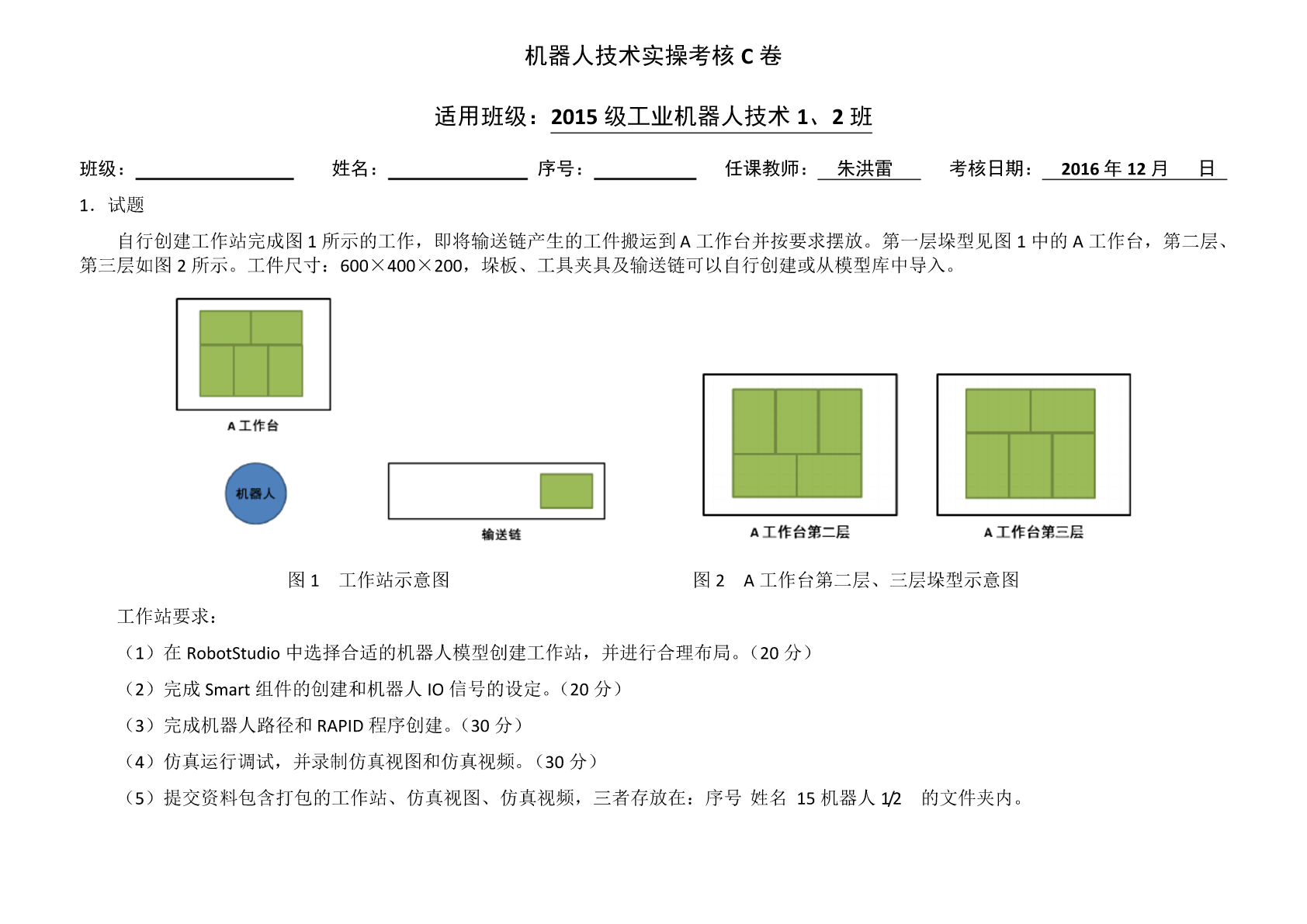
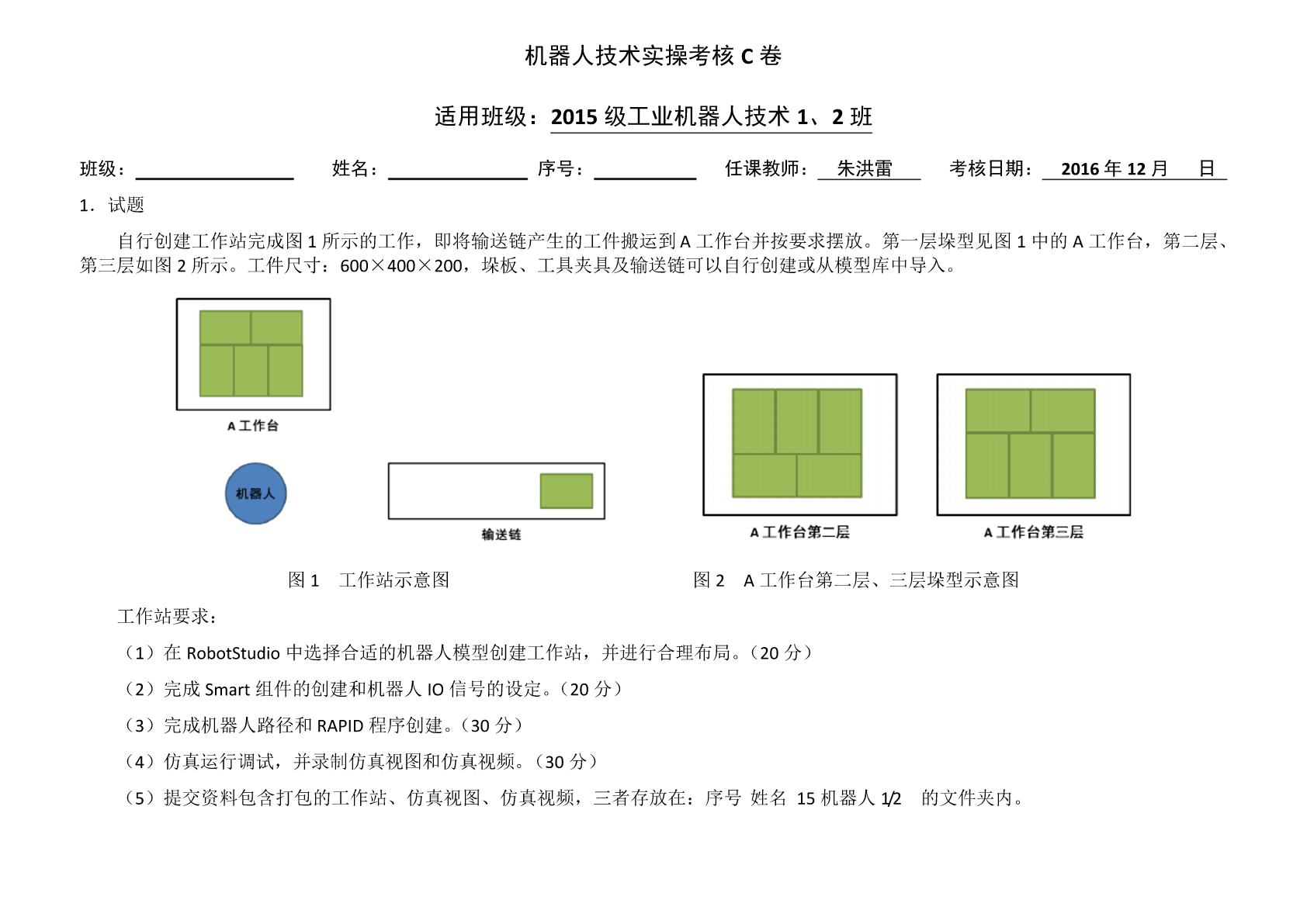
机器人技术实操考核C卷适用班级:2015级工业机器人技术1、2班班级:姓名:序号:任课教师:朱洪雷考核日期:2016年12月日1.试题自行创建工作站完成图1所示的工作,即将输送链产生的工件搬运到A工作台并按要求摆放。第一层垛型见图1中的A工作台,第二层、第三层如图2所示。工件尺寸:600×400×200,垛板、工具夹具及输送链可以自行创建或从模型库中导入。图1工作站示意图图2A工作台第二层、三层垛型示意图工作站要求:(1)在RobotStudio中选择合适的机器人模型创建工作站,并进行合理布局。(20分)
工业机器人离线编程(ABB) 实训项目9 双臂机器人装配.pdf
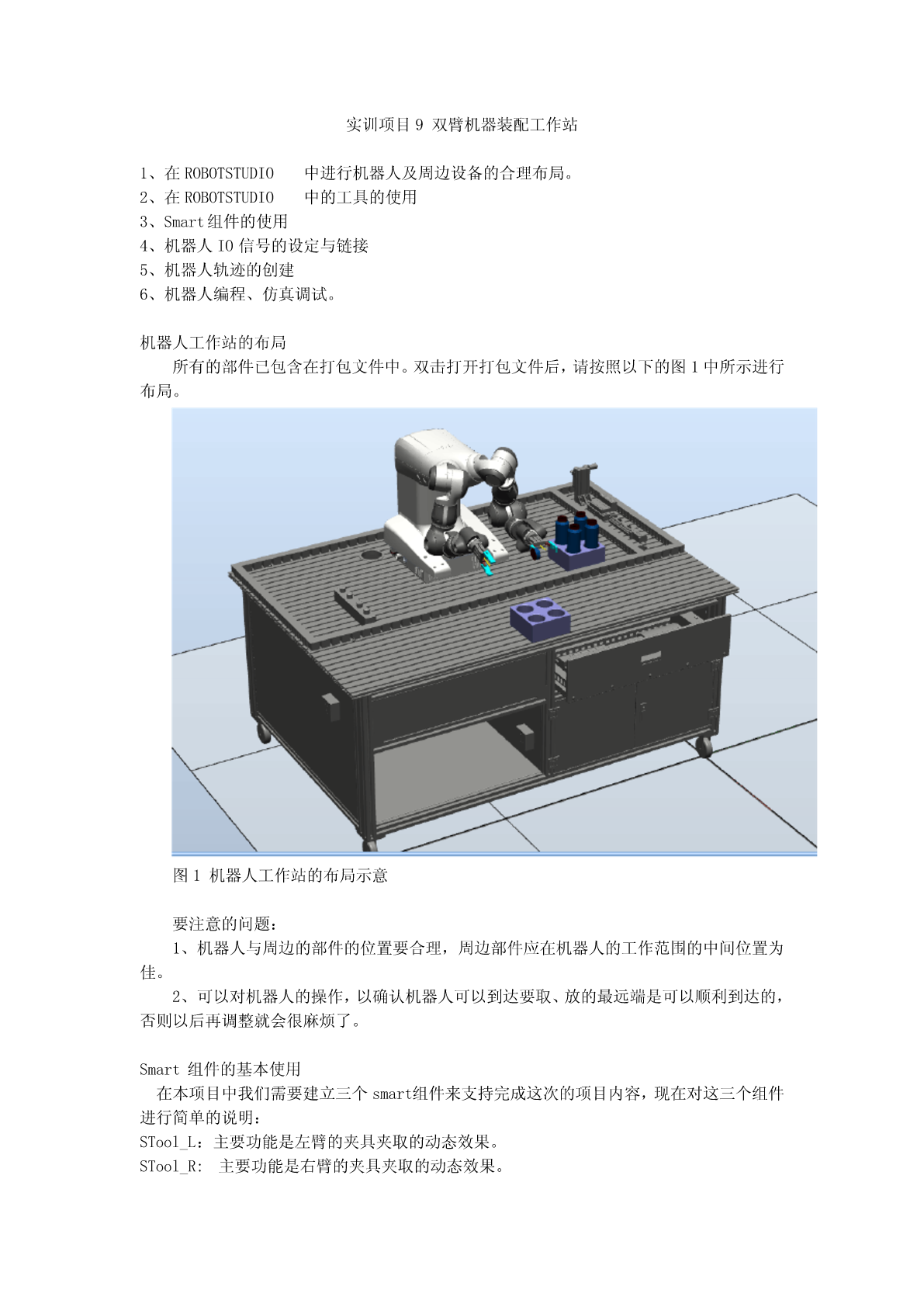
实训项目9双臂机器装配工作站1、在ROBOTSTUDIO中进行机器人及周边设备的合理布局。2、在ROBOTSTUDIO中的工具的使用3、Smart组件的使用4、机器人IO信号的设定与链接5、机器人轨迹的创建6、机器人编程、仿真调试。机器人工作站的布局所有的部件已包含在打包文件中。双击打开打包文件后,请按照以下的图1中所示进行布局。图1机器人工作站的布局示意要注意的问题:1、机器人与周边的部件的位置要合理,周边部件应在机器人的工作范围的中间位置为佳。2、可以对机器人的操作,以确认机器人可以到达要取、放的最远
工业机器人离线编程(ABB) 实训项目9 双臂机器人装配.pdf
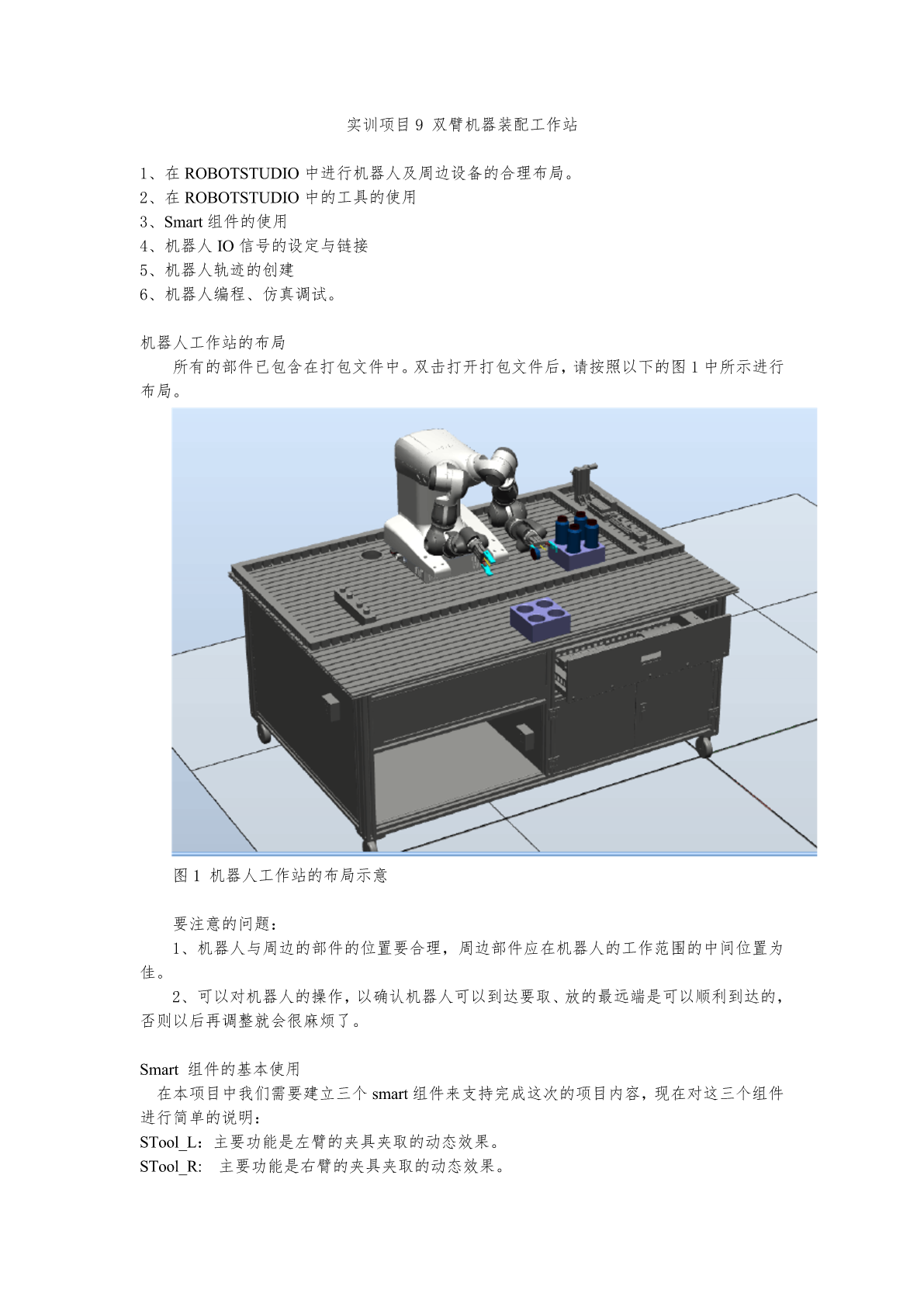
实训项目9双臂机器装配工作站1、在ROBOTSTUDIO中进行机器人及周边设备的合理布局。2、在ROBOTSTUDIO中的工具的使用3、Smart组件的使用4、机器人IO信号的设定与链接5、机器人轨迹的创建6、机器人编程、仿真调试。机器人工作站的布局所有的部件已包含在打包文件中。双击打开打包文件后,请按照以下的图1中所示进行布局。图1机器人工作站的布局示意要注意的问题:1、机器人与周边的部件的位置要合理,周边部件应在机器人的工作范围的中间位置为佳。2、可以对机器人的操作,以确认机器人可以到达要取、放的最远
工业机器人离线编程课程.pdf
《工业机器人离线编程》课程标准课程名称工业机器人离线编程课程编码2C适用专业工业机器人技术学时/学分64/3课程标准编制人审定人本课程旨在提高学生在机器人方面的综合素质,着重使学生掌握从事机器人加工类企业中机器人工作所必备的知识和基本技能,初步形成处理实际问题的能力。培养其分析问题和解决问题的学习能力,具备继续学习专业技术的能力;在本课程的学习中渗透思想道德和职业素养等方面的教育,使学生形成认真负责的工作态度和严谨的工作作风,为后续课程学习和职业生涯的发展奠定基础。一、课程分析(一)教学计划的制定和教学内

工业机器人离线编程(安川) T-08-O-Y- 工业机器人离线编程试卷-1.pdf
7.SolidWorks中在零件中可以将特征进行压缩处理。对阵列的源特征压缩,该阵列特考试学期开课部门征会()考试班级A.被删除B.不被压缩C.被压缩考试形式闭卷8.在SolidWorks建模过程中,最基础的是草图绘制,下列平面中哪一类不能绘制草图?______题号一二三四五六七八九……总分A.基准面B.实体的平面表面C.剖面视图的平面剖面:得分)号9.SolidWorks中在创建异型孔特征时,设定配合类型的____选项。本试卷,请核对试卷页数,班级、姓名等信息写在左侧,否则试卷无效。D(IA.大小