
工业机器人离线编程(ABB) 实训项目9 双臂机器人装配.pdf

文库****品店

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
工业机器人离线编程(ABB) 实训项目9 双臂机器人装配.pdf
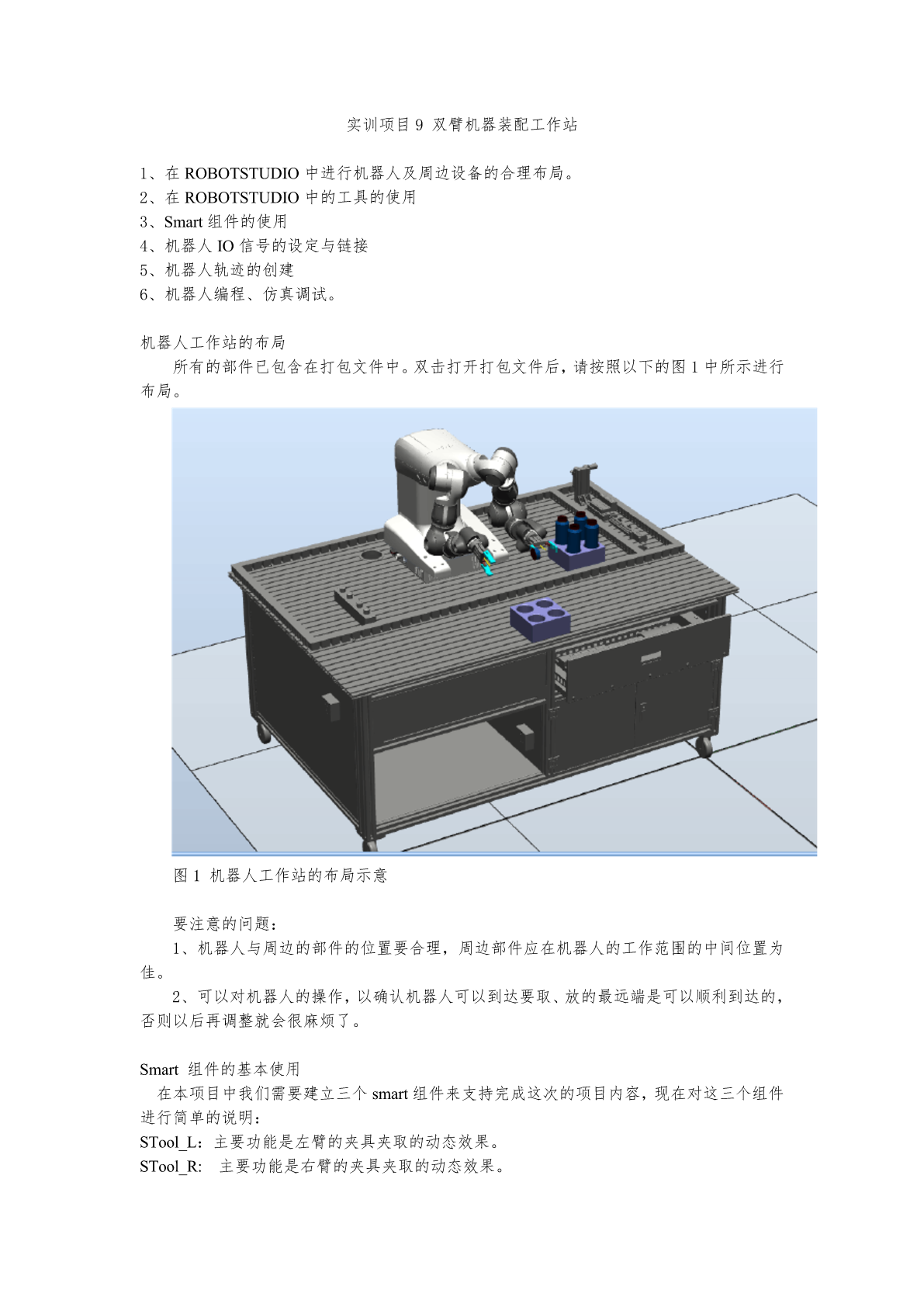
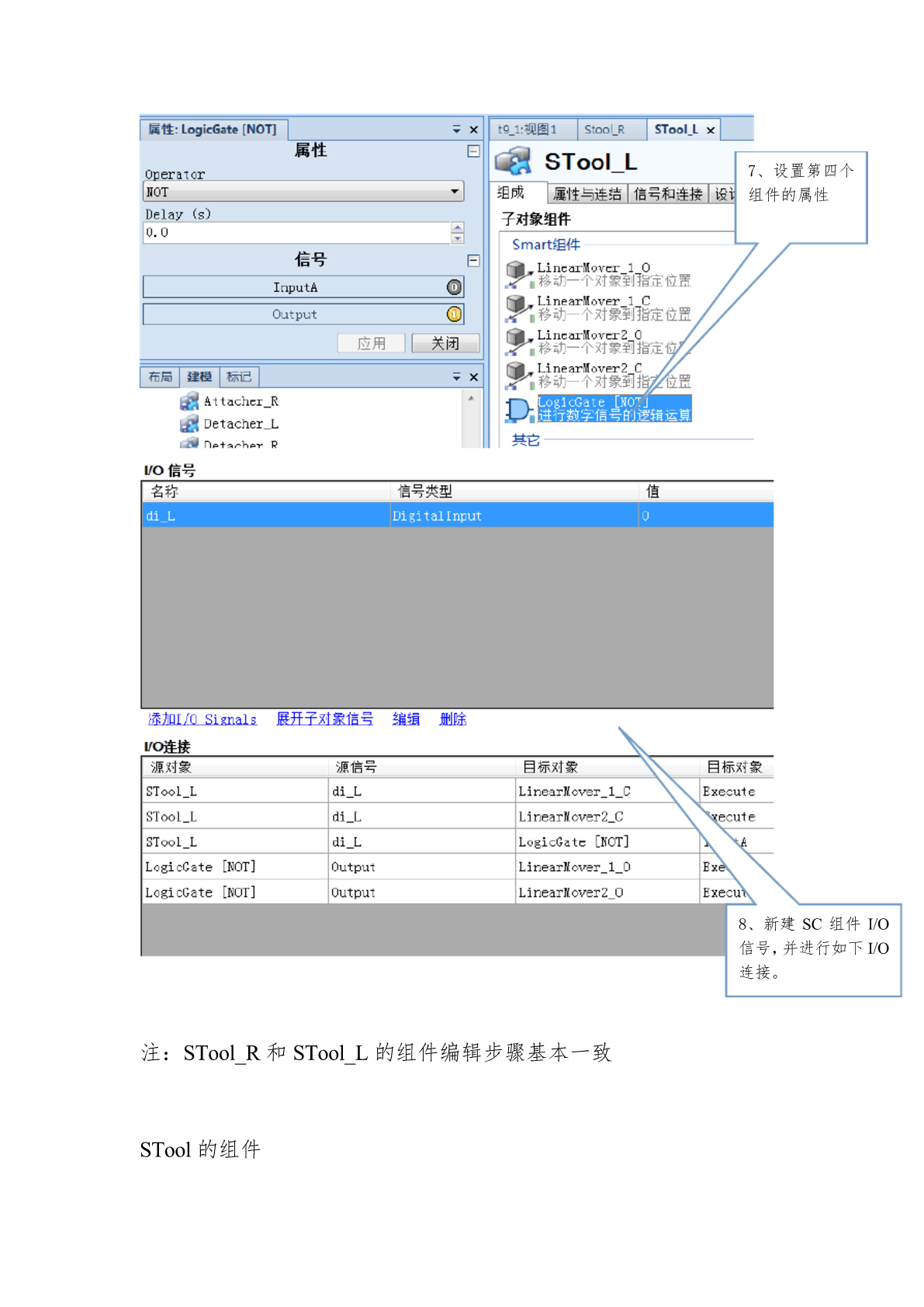
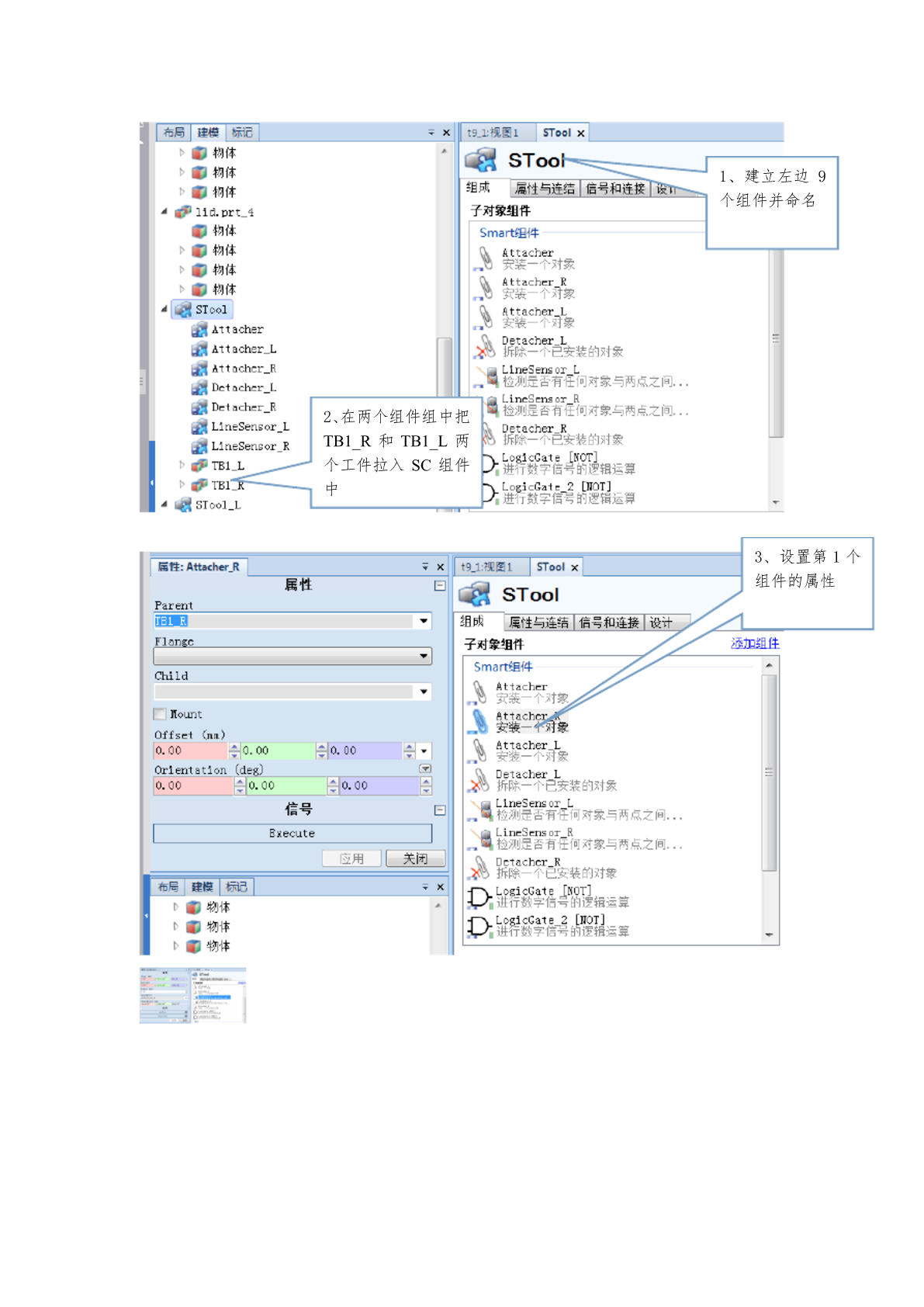
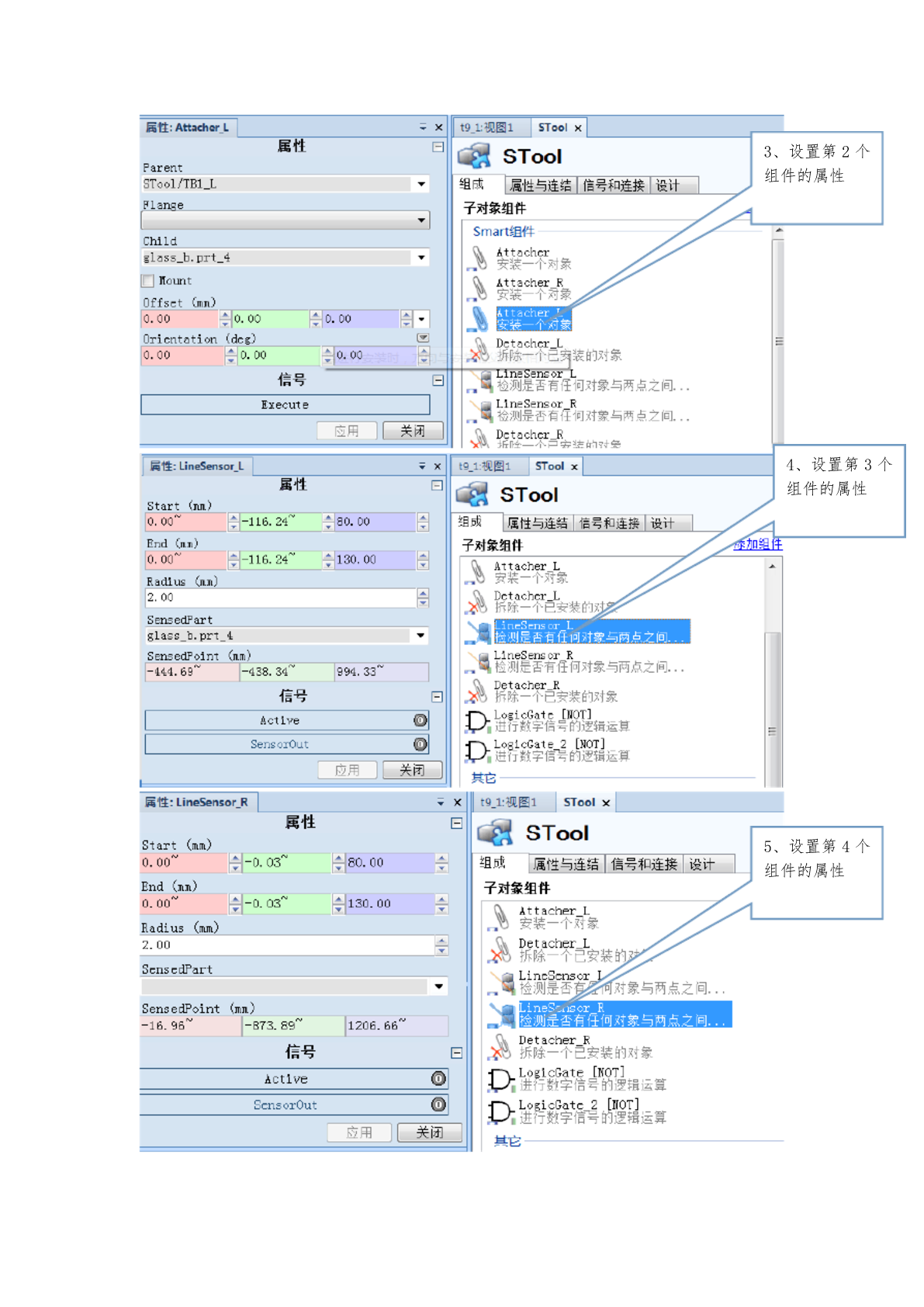
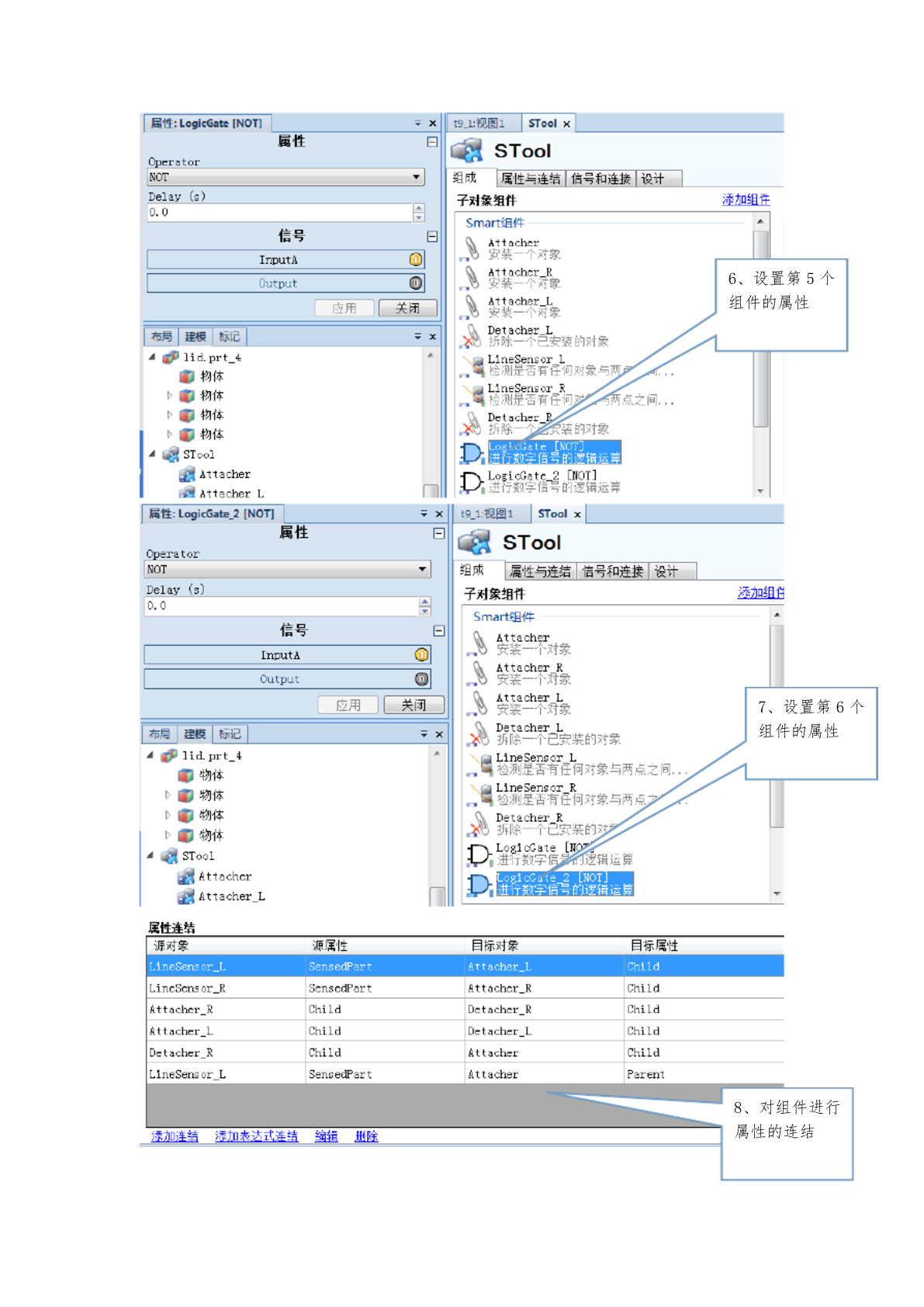
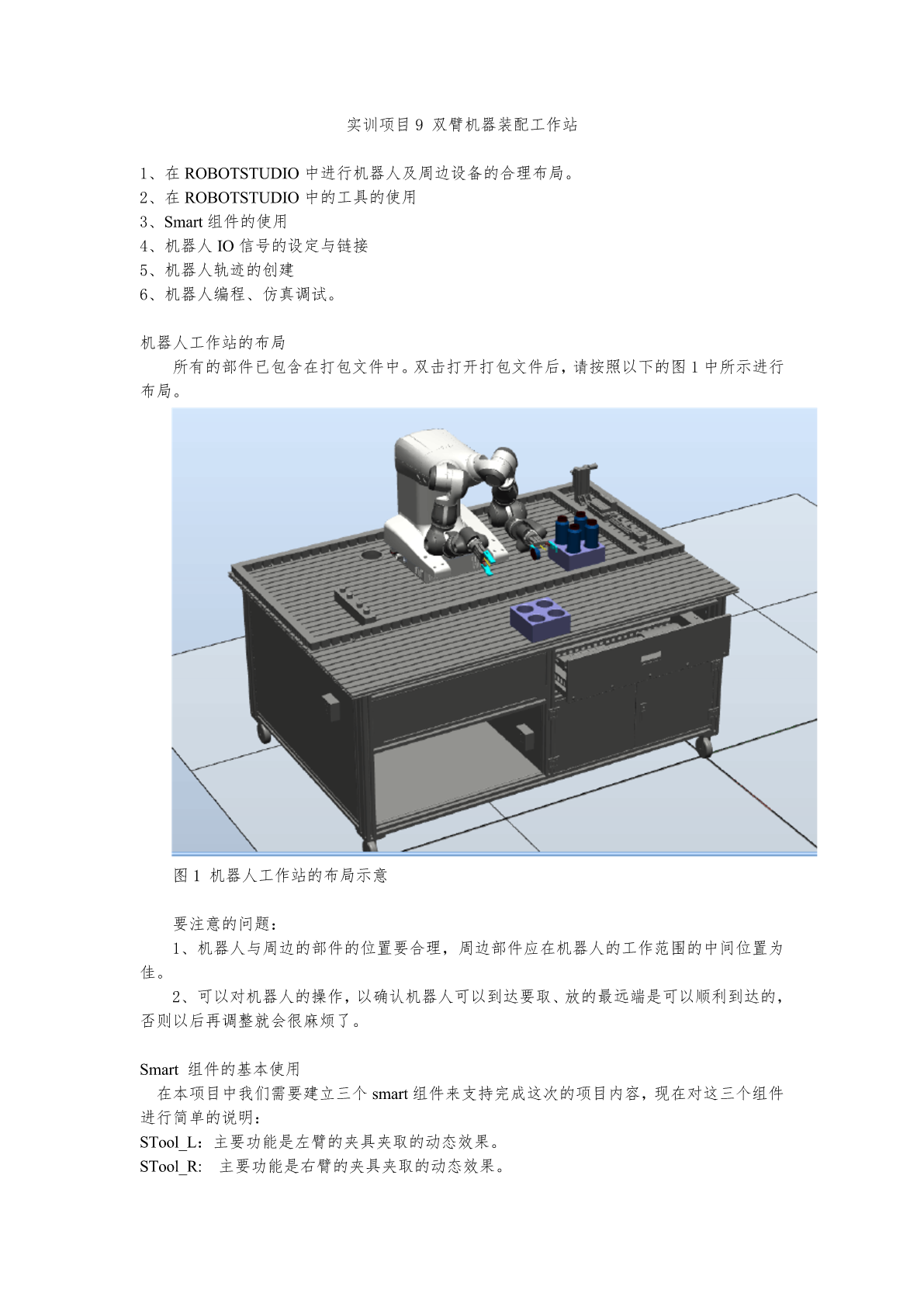
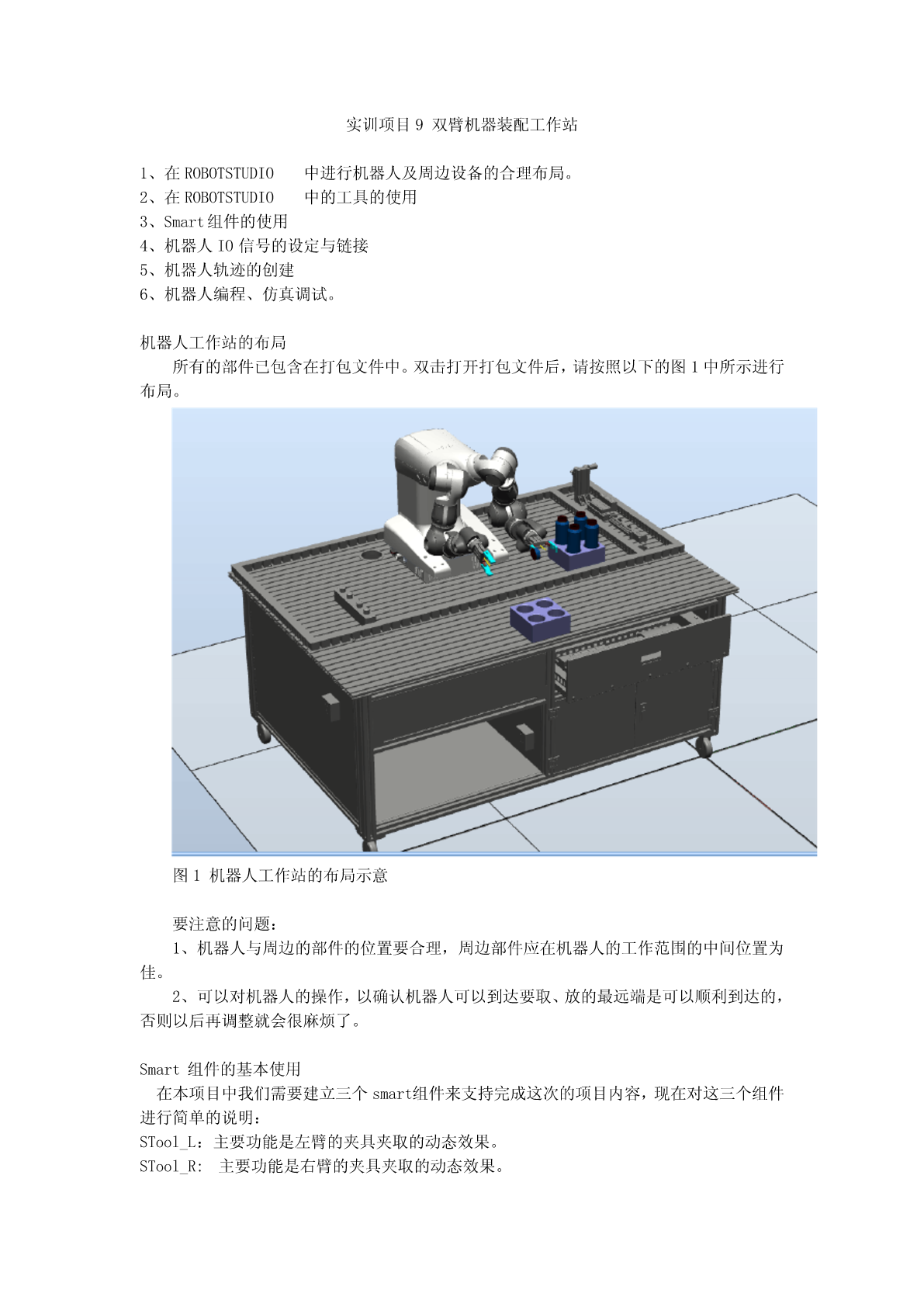
实训项目9双臂机器装配工作站1、在ROBOTSTUDIO中进行机器人及周边设备的合理布局。2、在ROBOTSTUDIO中的工具的使用3、Smart组件的使用4、机器人IO信号的设定与链接5、机器人轨迹的创建6、机器人编程、仿真调试。机器人工作站的布局所有的部件已包含在打包文件中。双击打开打包文件后,请按照以下的图1中所示进行布局。图1机器人工作站的布局示意要注意的问题:1、机器人与周边的部件的位置要合理,周边部件应在机器人的工作范围的中间位置为佳。2、可以对机器人的操作,以确认机器人可以到达要取、放的最远
工业机器人离线编程(ABB) 实训项目9 双臂机器人装配.pdf
实训项目9双臂机器装配工作站1、在ROBOTSTUDIO中进行机器人及周边设备的合理布局。2、在ROBOTSTUDIO中的工具的使用3、Smart组件的使用4、机器人IO信号的设定与链接5、机器人轨迹的创建6、机器人编程、仿真调试。机器人工作站的布局所有的部件已包含在打包文件中。双击打开打包文件后,请按照以下的图1中所示进行布局。图1机器人工作站的布局示意要注意的问题:1、机器人与周边的部件的位置要合理,周边部件应在机器人的工作范围的中间位置为佳。2、可以对机器人的操作,以确认机器人可以到达要取、放的最远
工业机器人离线编程(ABB) 工业机器人技术试卷13.pdf
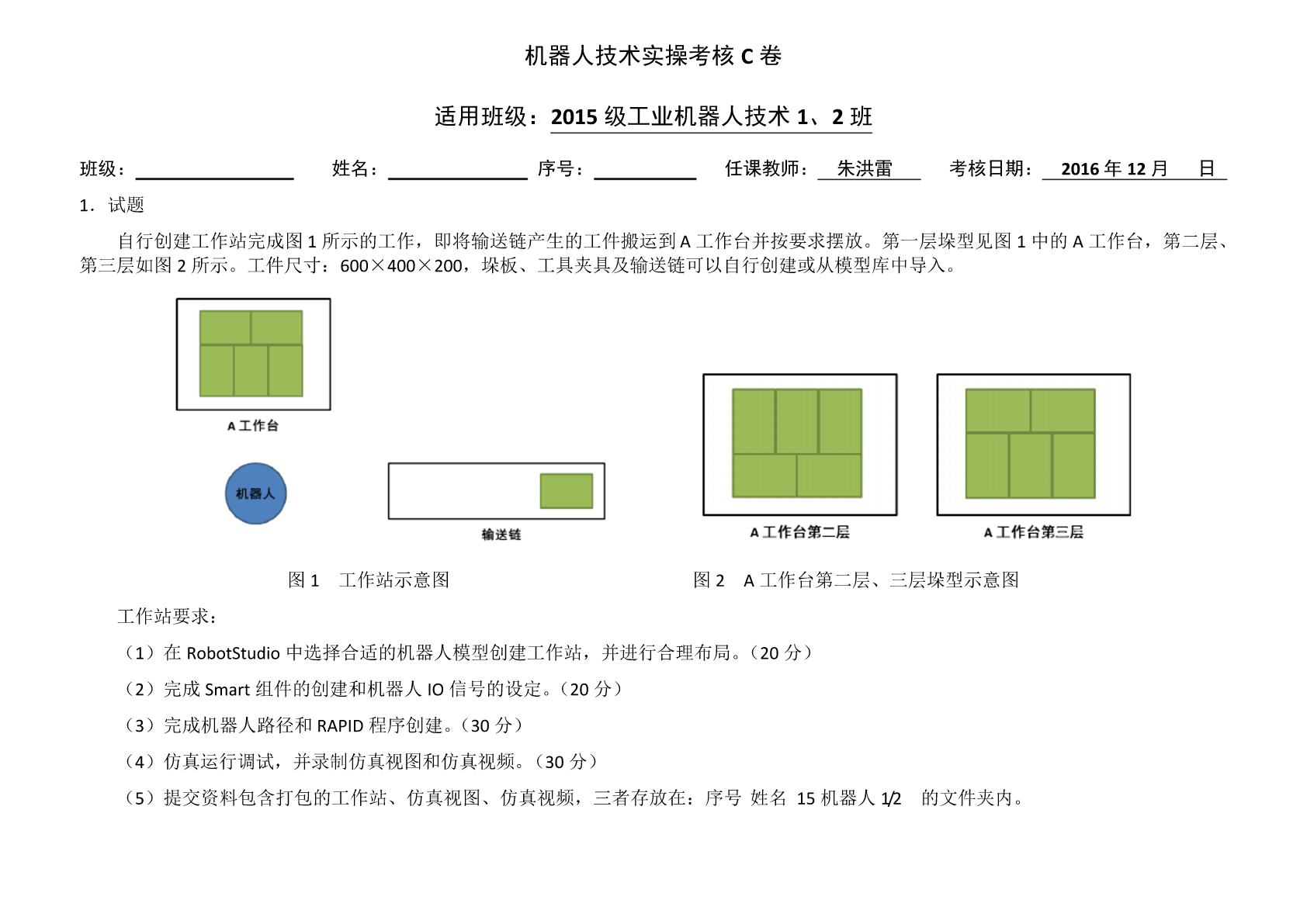
机器人技术实操考核C卷适用班级:2015级工业机器人技术1、2班班级:姓名:序号:任课教师:朱洪雷考核日期:2016年12月日1.试题自行创建工作站完成图1所示的工作,即将输送链产生的工件搬运到A工作台并按要求摆放。第一层垛型见图1中的A工作台,第二层、第三层如图2所示。工件尺寸:600×400×200,垛板、工具夹具及输送链可以自行创建或从模型库中导入。图1工作站示意图图2A工作台第二层、三层垛型示意图工作站要求:(1)在RobotStudio中选择合适的机器人模型创建工作站,并进行合理布局。(20分)

FANUC工业机器人离线编程 工业机器人写字项目.pdf
工业机器人写字项目实施资料制作:工业机器人协会1目录第一章、SOLIDWORKSExplorer操作...........................................................................................3第二章、ROBOGUIDE仿真操作................................................................................................

实训项目九 焊接机器人的离线编程.pdf
实训项目九焊接机器人的离线编程实训学科焊接加工实训题目焊接机器人的离线编程指导教师实训用物示教器、焊条、焊枪、Panasonic弧焊机器人、焊接护具、YD—350GR3数字弧焊电源等常用工具。项目描述本任务主要学习机器人示教的主要内容,掌握示教点及其属性的登录,并能够完成平板堆焊的运动示教。实训步骤表9焊接机器人的离线编程实训步骤序号实训项目实训步骤一、离线编程与仿真焊接机器人的1.创建新的设备链接1离线编程启动DTPS软件,创建一个新的设备链接“单体机器人”。(1)单击【开始】→【所有程序】→【Pana