
高空清洁机器人.doc

15****47

1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
高空清洁机器人.doc
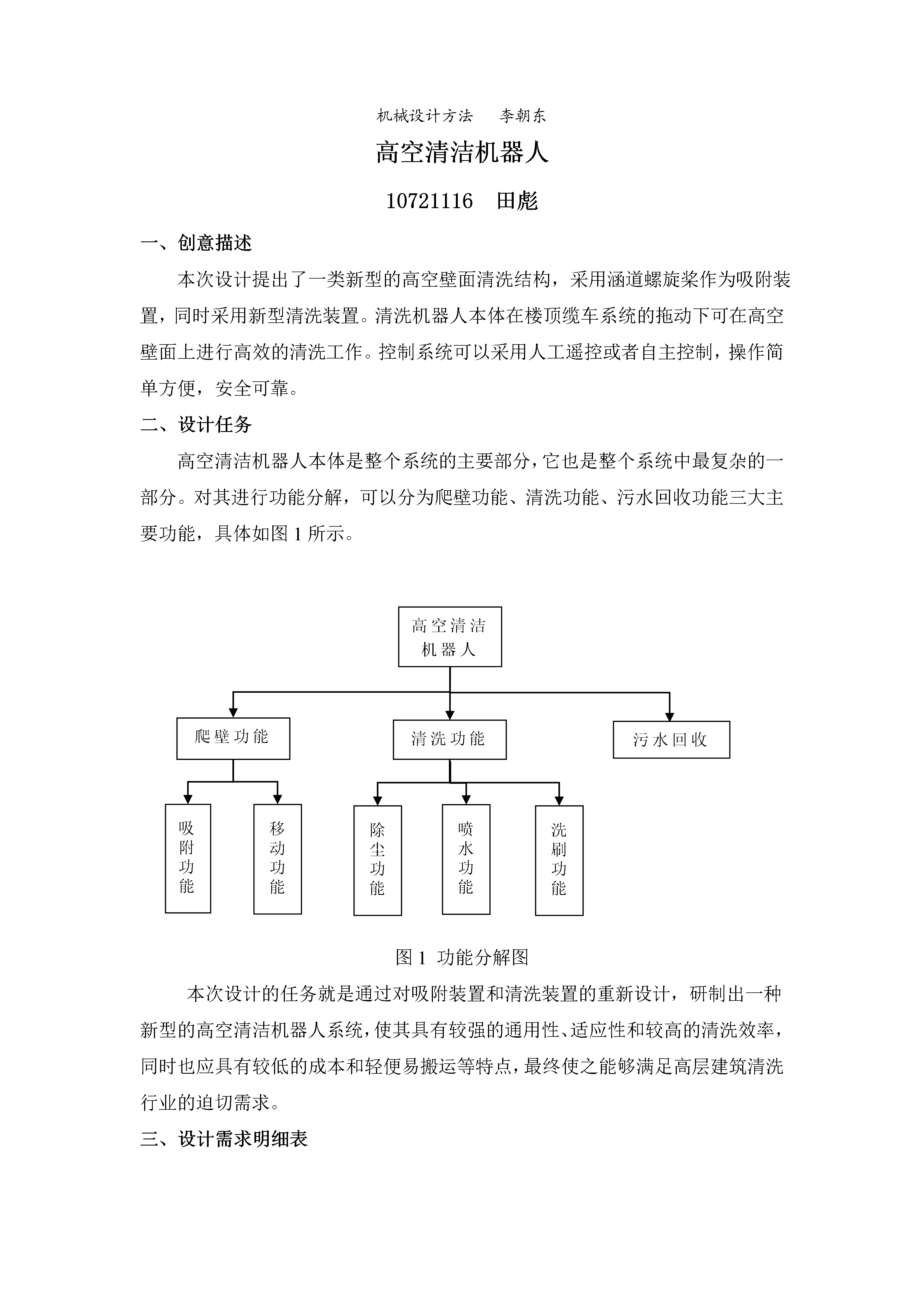
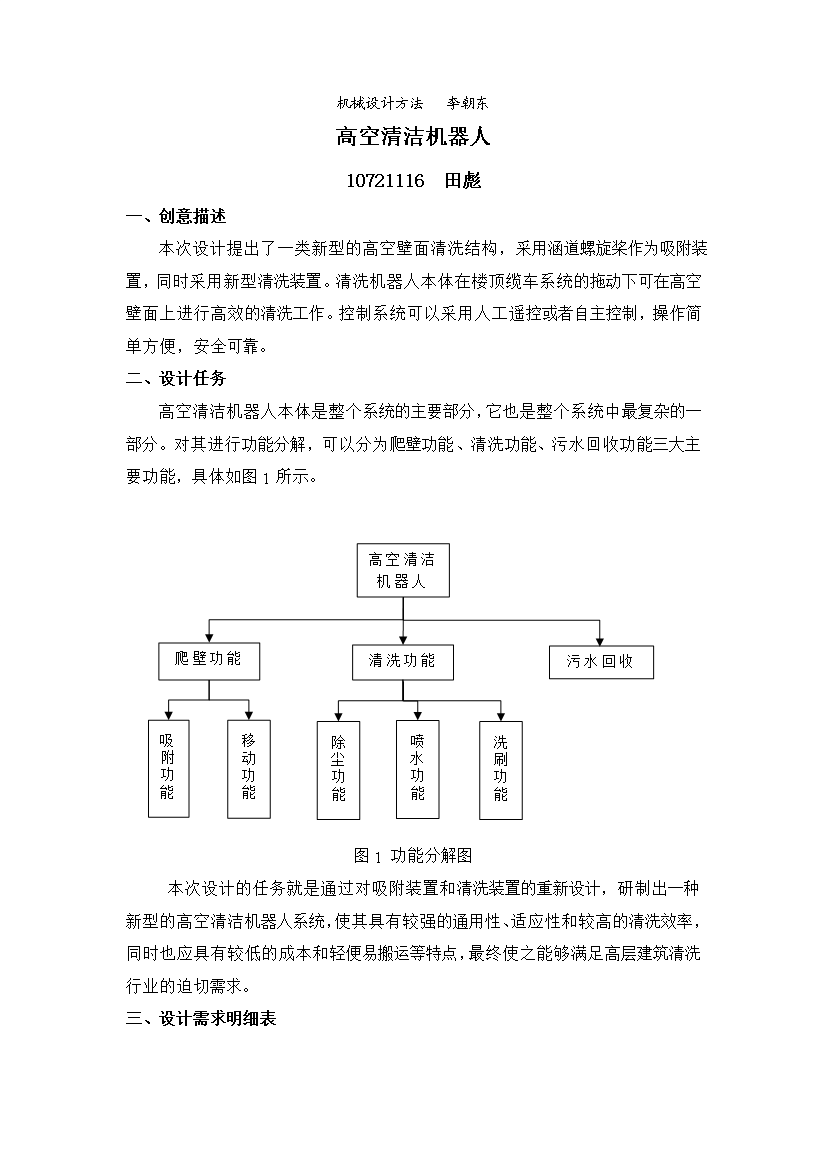
机械设计方法李朝东高空清洁机器人10721116田彪一、创意描述本次设计提出了一类新型的高空壁面清洗结构,采用涵道螺旋桨作为吸附装置,同时采用新型清洗装置。清洗机器人本体在楼顶缆车系统的拖动下可在高空壁面上进行高效的清洗工作。控制系统可以采用人工遥控或者自主控制,操作简单方便,安全可靠。设计任务高空清洁机器人本体是整个系统的主要部分,它也是整个系统中最复杂的一部分。对其进行功能分解,可以分为爬壁功能、清洗功能、污水回收功能三大主要功能,具体如图1所示。高空清洁机器人清洗功能爬壁功能污水回收洗刷功能除尘功能
高空玻璃外墙清洁机器人.pdf
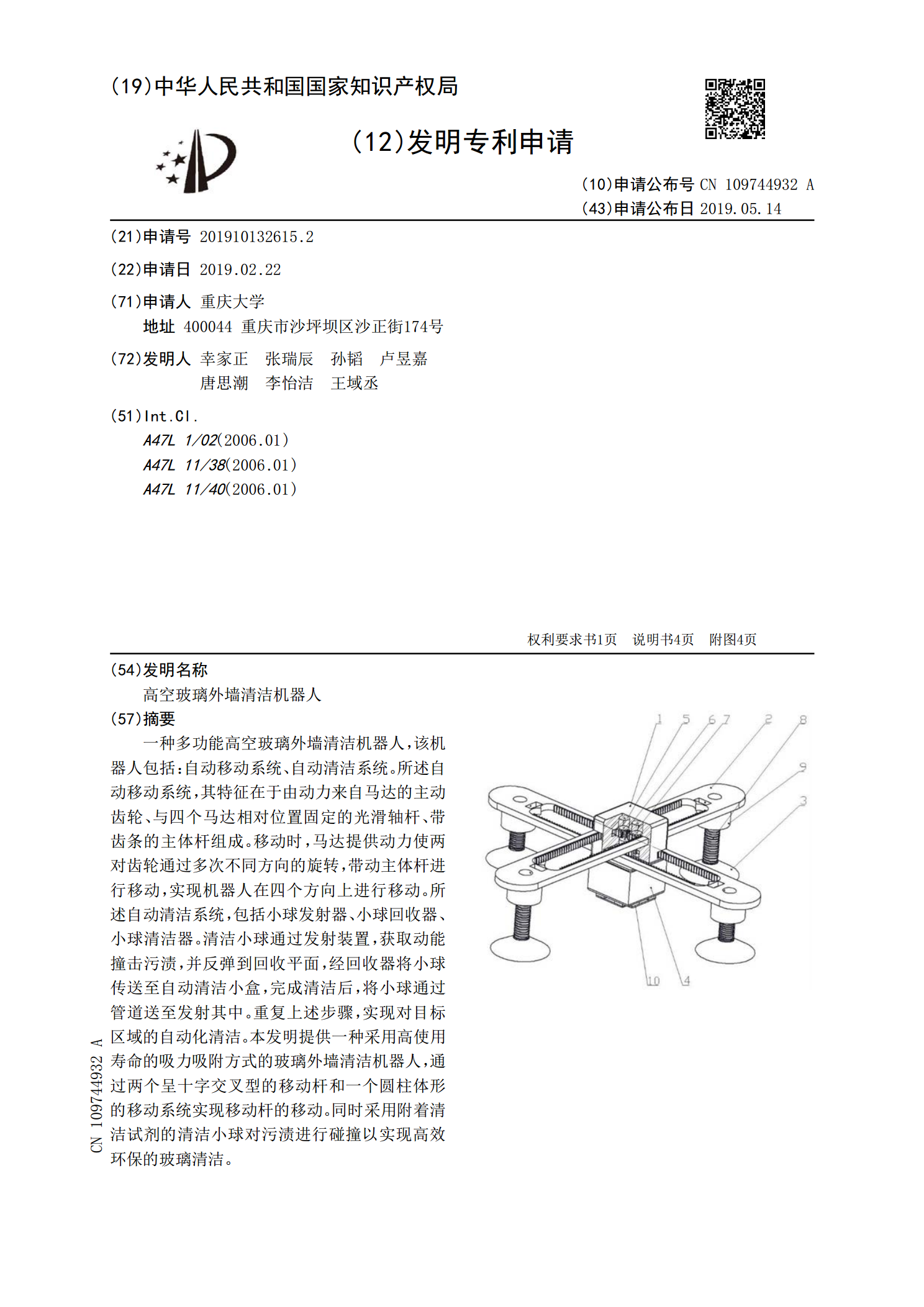
一种多功能高空玻璃外墙清洁机器人,该机器人包括:自动移动系统、自动清洁系统。所述自动移动系统,其特征在于由动力来自马达的主动齿轮、与四个马达相对位置固定的光滑轴杆、带齿条的主体杆组成。移动时,马达提供动力使两对齿轮通过多次不同方向的旋转,带动主体杆进行移动,实现机器人在四个方向上进行移动。所述自动清洁系统,包括小球发射器、小球回收器、小球清洁器。清洁小球通过发射装置,获取动能撞击污渍,并反弹到回收平面,经回收器将小球传送至自动清洁小盒,完成清洁后,将小球通过管道送至发射其中。重复上述步骤,实现对目标区域的
一种全自动高空清洁玻璃机器人.pdf
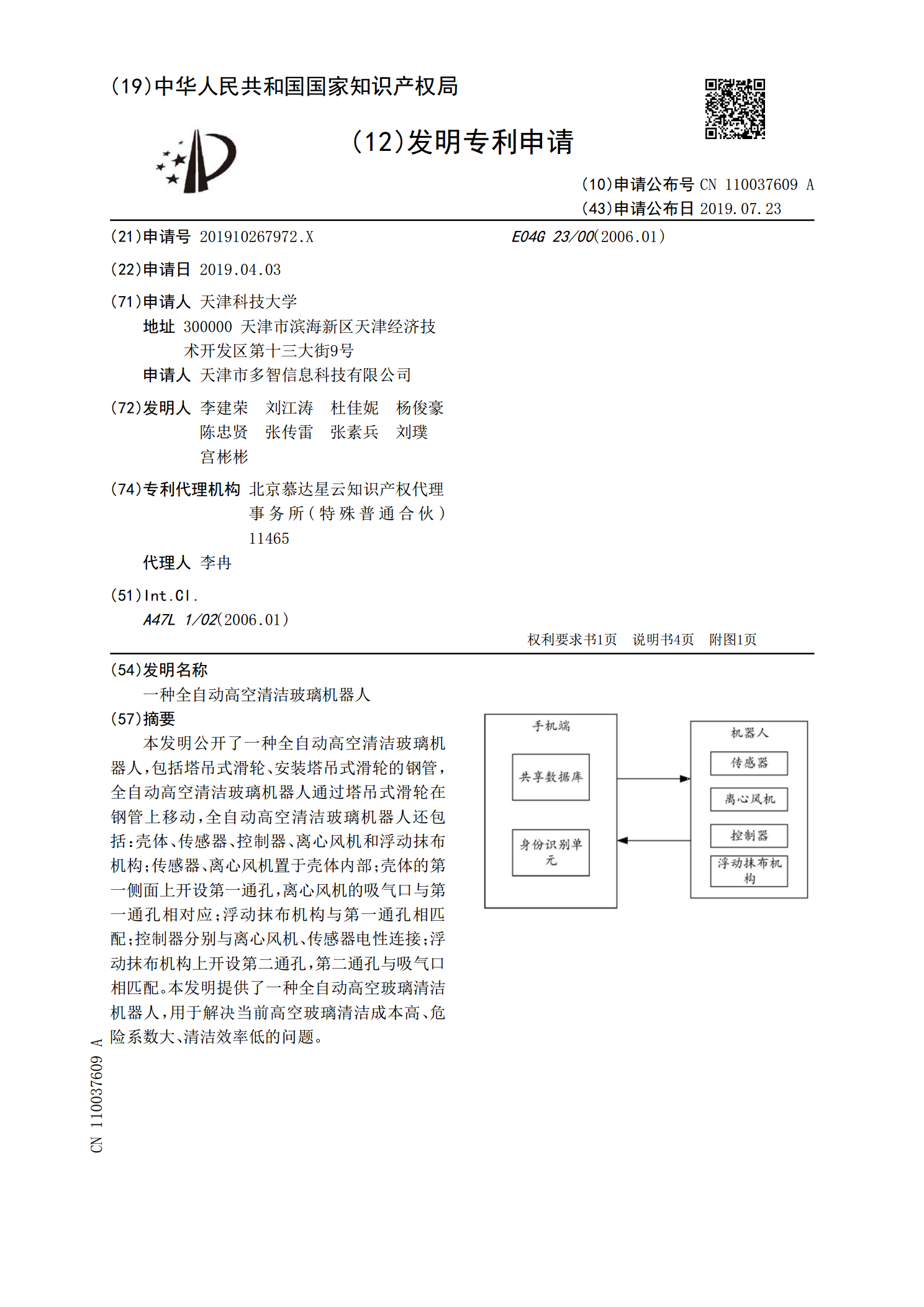
本发明公开了一种全自动高空清洁玻璃机器人,包括塔吊式滑轮、安装塔吊式滑轮的钢管,全自动高空清洁玻璃机器人通过塔吊式滑轮在钢管上移动,全自动高空清洁玻璃机器人还包括:壳体、传感器、控制器、离心风机和浮动抹布机构;传感器、离心风机置于壳体内部;壳体的第一侧面上开设第一通孔,离心风机的吸气口与第一通孔相对应;浮动抹布机构与第一通孔相匹配;控制器分别与离心风机、传感器电性连接;浮动抹布机构上开设第二通孔,第二通孔与吸气口相匹配。本发明提供了一种全自动高空玻璃清洁机器人,用于解决当前高空玻璃清洁成本高、危险系数大、

一种高空外墙清洁机器人的清洁系统及其清洁方法.pdf
本发明涉及建筑物外墙清洁技术领域,尤其涉及一种高空外墙清洁机器人的清洁系统及其清洁方法,包括清洁机器、安装在清洁机器上的清水系统和清洁剂系统,清洁剂系统包括清洁剂水箱和清洁剂水泵,清洁剂水箱和清洁剂水泵之间设有第一过滤器,清洁剂水泵分别与第一减压阀、上行喷清洁剂雾电磁阀和下行喷清洁剂雾电磁阀连接,上行喷清洁剂雾电磁阀连接有第一上行雾化喷头;下行喷清洁剂雾电磁阀连接有第一下行雾化喷头;本发明采用喷雾式喷头可节约资源同时减少污水的产生,配合使用盘刷,可由其内旋式设计进一步免除污水的残留;上、下双向清洗可以最大

一种用于清洁高空幕墙的履带式机器人.pdf
本发明涉及一种用于清洁高空幕墙的履带式机器人,其包括两个固定架、第一链条、水平移动装置、第二链条、机器人本体、电源和控制器;第一链条的两端分别与两个固定架固定连接,水平移动装置包括设置在装置内部的第一飞轮电机、第一从动齿轮和第二从动齿轮,第一链条依次与第一飞轮电机、第一从动齿轮、第二从动齿轮相啮合;第二链条的一端与水平移动装置的侧部固定连接;机器人本体包括飞控装置、垂直移动装置、履带小车和至少两个擦盘,一种用于清洁高空幕墙的履带式机器人具有以下有益效果:1、由于链条的结构,在有风的情况系摆动较小,也能安全