
高空玻璃外墙清洁机器人.pdf

是立****92


1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
高空玻璃外墙清洁机器人.pdf
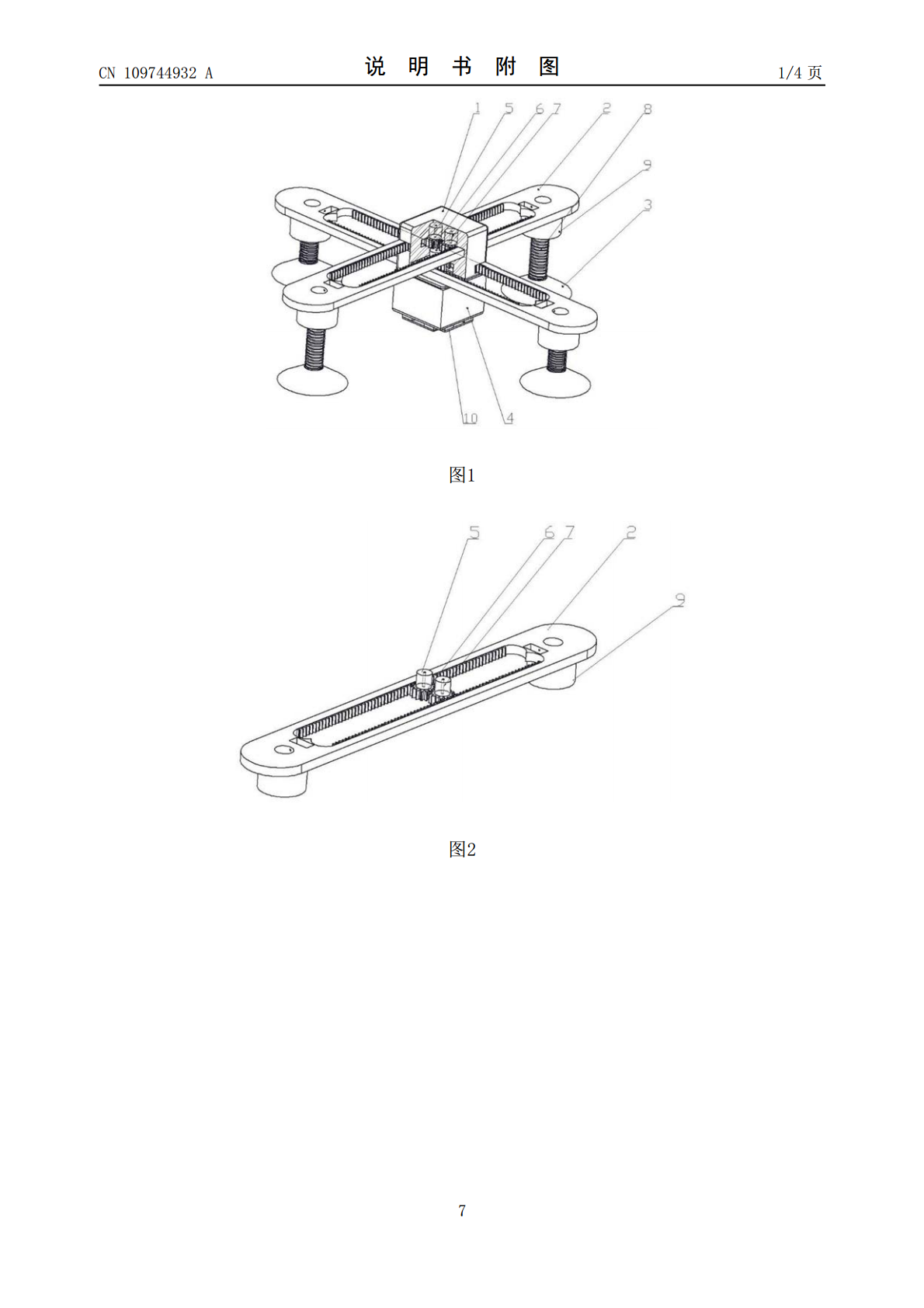
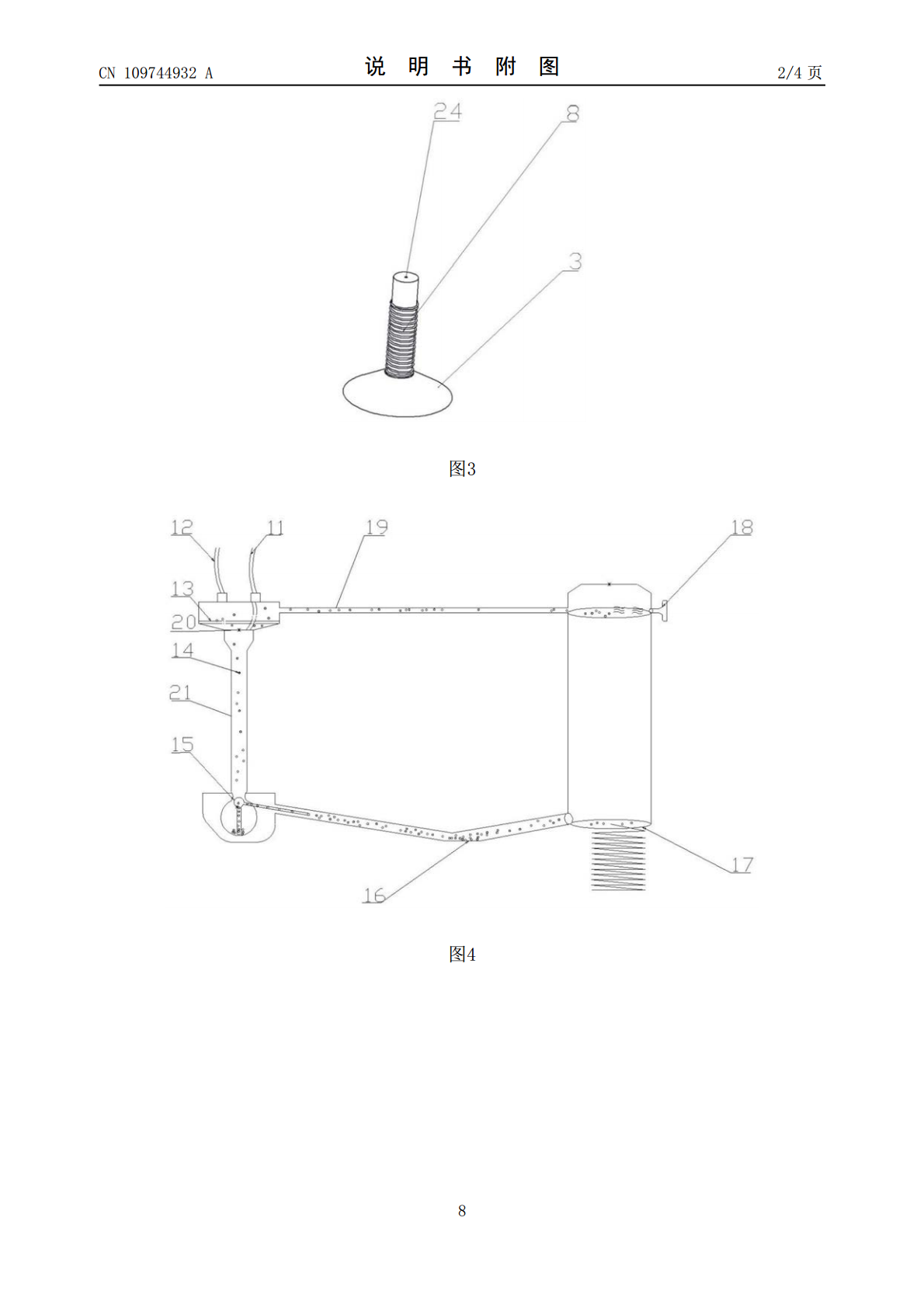
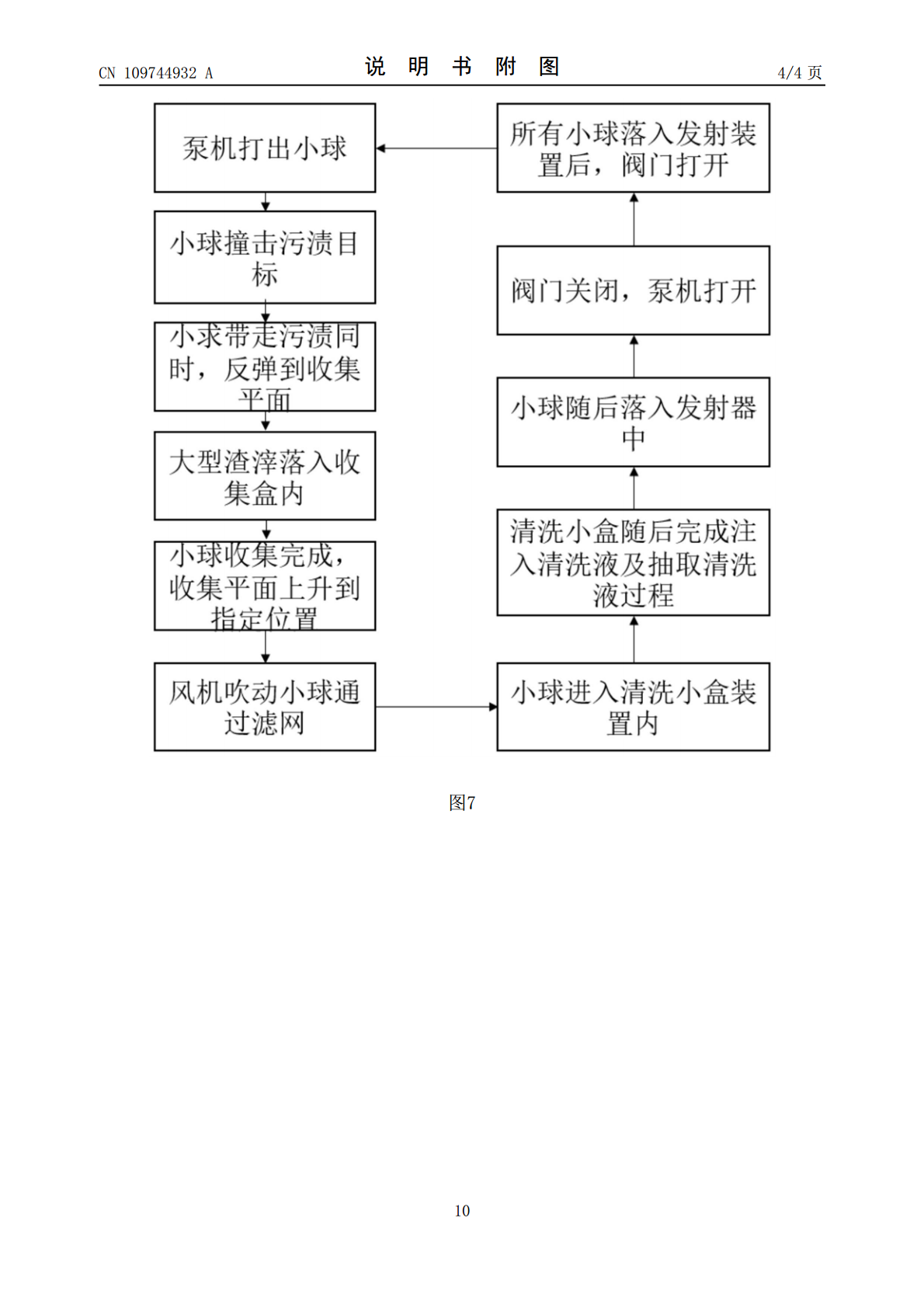
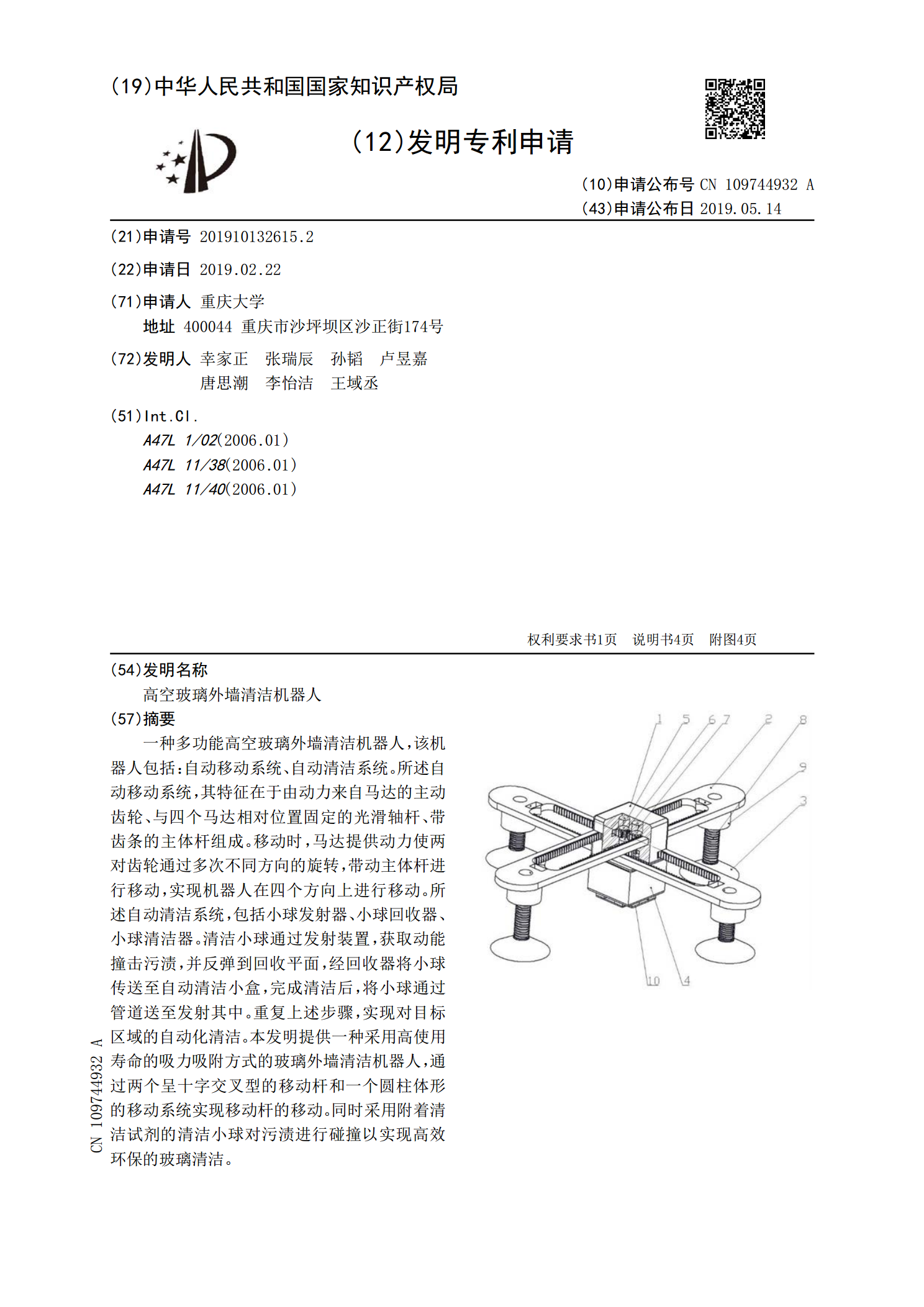
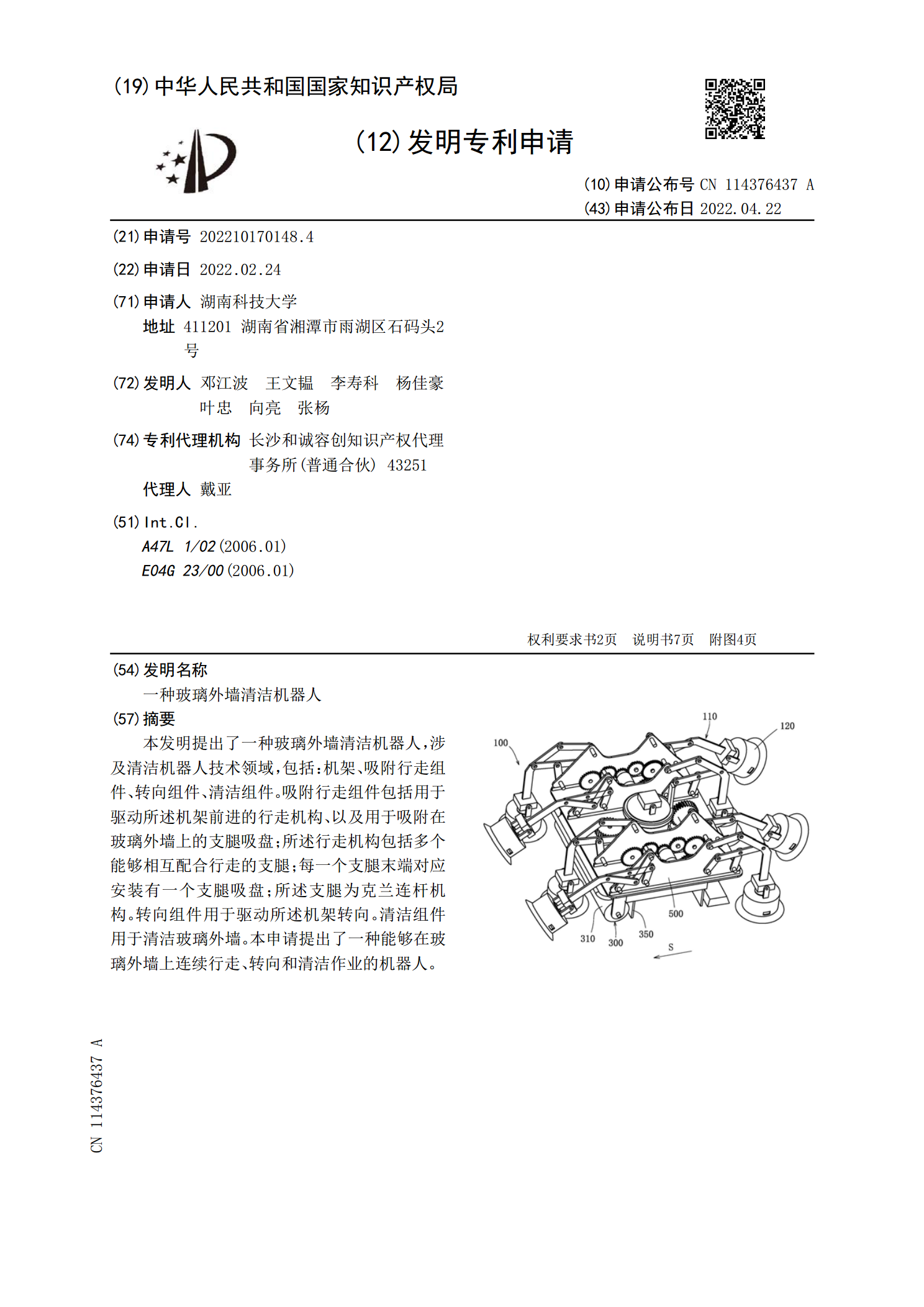
一种多功能高空玻璃外墙清洁机器人,该机器人包括:自动移动系统、自动清洁系统。所述自动移动系统,其特征在于由动力来自马达的主动齿轮、与四个马达相对位置固定的光滑轴杆、带齿条的主体杆组成。移动时,马达提供动力使两对齿轮通过多次不同方向的旋转,带动主体杆进行移动,实现机器人在四个方向上进行移动。所述自动清洁系统,包括小球发射器、小球回收器、小球清洁器。清洁小球通过发射装置,获取动能撞击污渍,并反弹到回收平面,经回收器将小球传送至自动清洁小盒,完成清洁后,将小球通过管道送至发射其中。重复上述步骤,实现对目标区域的
一种玻璃外墙清洁机器人.pdf
本发明提出了一种玻璃外墙清洁机器人,涉及清洁机器人技术领域,包括:机架、吸附行走组件、转向组件、清洁组件。吸附行走组件包括用于驱动所述机架前进的行走机构、以及用于吸附在玻璃外墙上的支腿吸盘;所述行走机构包括多个能够相互配合行走的支腿;每一个支腿末端对应安装有一个支腿吸盘;所述支腿为克兰连杆机构。转向组件用于驱动所述机架转向。清洁组件用于清洁玻璃外墙。本申请提出了一种能够在玻璃外墙上连续行走、转向和清洁作业的机器人。
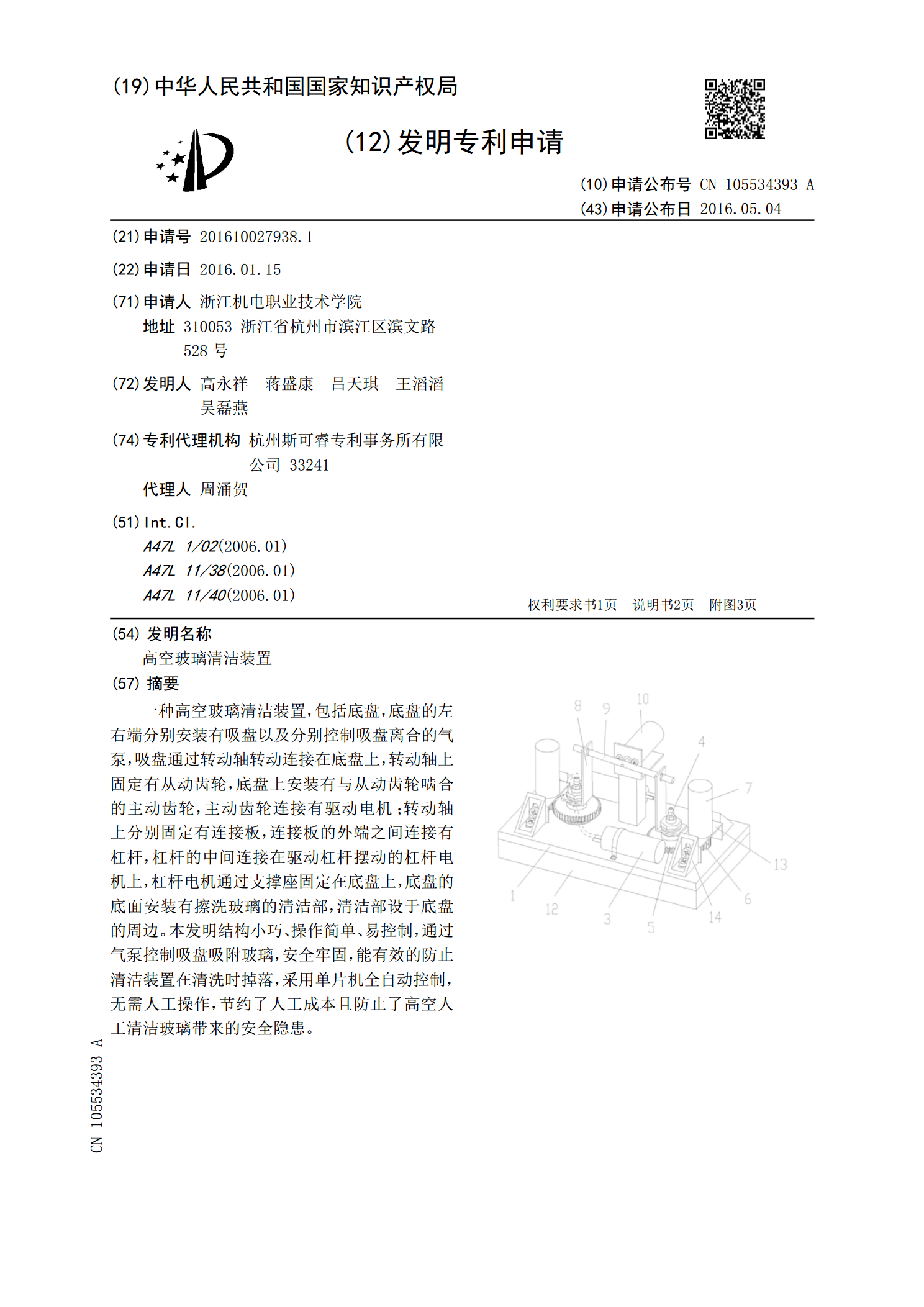
高空玻璃清洁装置.pdf
一种高空玻璃清洁装置,包括底盘,底盘的左右端分别安装有吸盘以及分别控制吸盘离合的气泵,吸盘通过转动轴转动连接在底盘上,转动轴上固定有从动齿轮,底盘上安装有与从动齿轮啮合的主动齿轮,主动齿轮连接有驱动电机;转动轴上分别固定有连接板,连接板的外端之间连接有杠杆,杠杆的中间连接在驱动杠杆摆动的杠杆电机上,杠杆电机通过支撑座固定在底盘上,底盘的底面安装有擦洗玻璃的清洁部,清洁部设于底盘的周边。本发明结构小巧、操作简单、易控制,通过气泵控制吸盘吸附玻璃,安全牢固,能有效的防止清洁装置在清洗时掉落,采用单片机全自动控
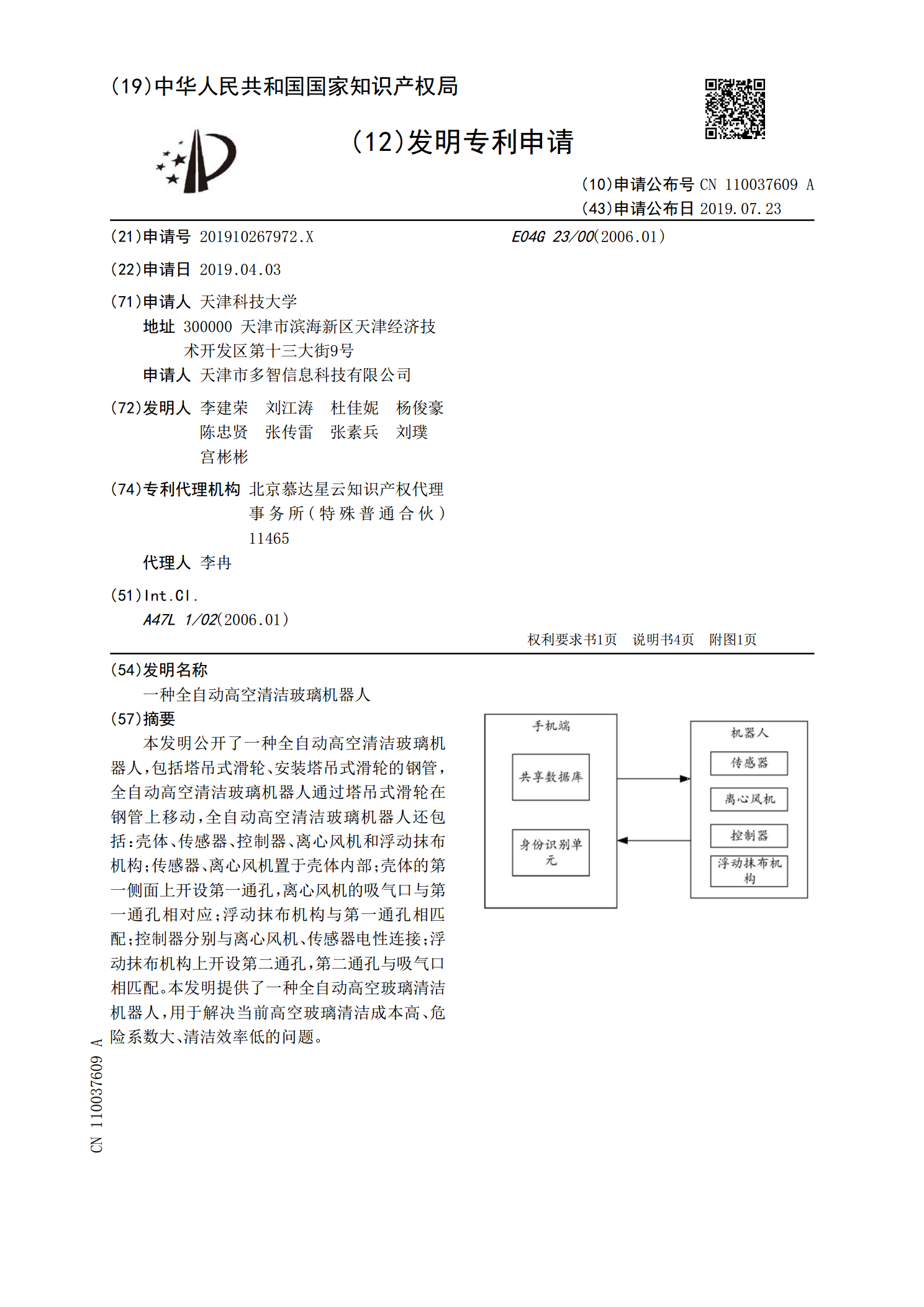
一种全自动高空清洁玻璃机器人.pdf
本发明公开了一种全自动高空清洁玻璃机器人,包括塔吊式滑轮、安装塔吊式滑轮的钢管,全自动高空清洁玻璃机器人通过塔吊式滑轮在钢管上移动,全自动高空清洁玻璃机器人还包括:壳体、传感器、控制器、离心风机和浮动抹布机构;传感器、离心风机置于壳体内部;壳体的第一侧面上开设第一通孔,离心风机的吸气口与第一通孔相对应;浮动抹布机构与第一通孔相匹配;控制器分别与离心风机、传感器电性连接;浮动抹布机构上开设第二通孔,第二通孔与吸气口相匹配。本发明提供了一种全自动高空玻璃清洁机器人,用于解决当前高空玻璃清洁成本高、危险系数大、
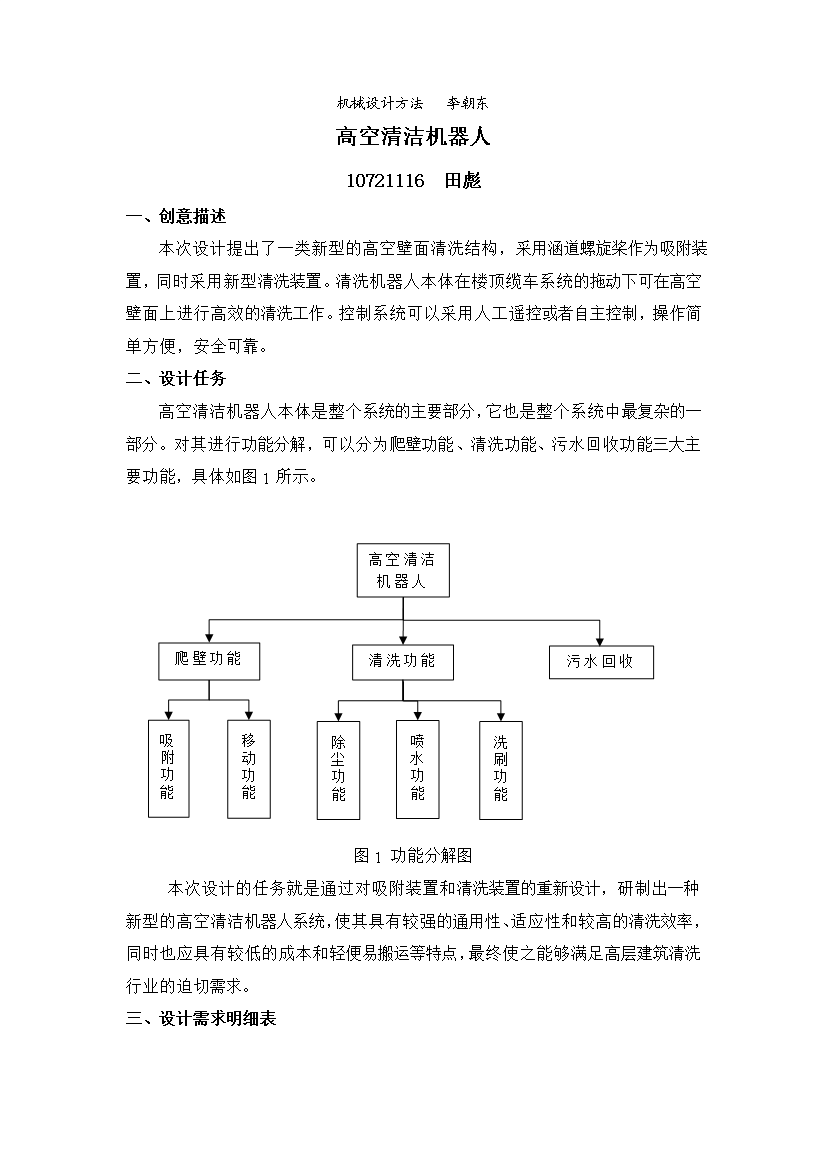
高空清洁机器人.doc
机械设计方法李朝东高空清洁机器人10721116田彪一、创意描述本次设计提出了一类新型的高空壁面清洗结构,采用涵道螺旋桨作为吸附装置,同时采用新型清洗装置。清洗机器人本体在楼顶缆车系统的拖动下可在高空壁面上进行高效的清洗工作。控制系统可以采用人工遥控或者自主控制,操作简单方便,安全可靠。设计任务高空清洁机器人本体是整个系统的主要部分,它也是整个系统中最复杂的一部分。对其进行功能分解,可以分为爬壁功能、清洗功能、污水回收功能三大主要功能,具体如图1所示。高空清洁机器人清洗功能爬壁功能污水回收洗刷功能除尘功能