
理论力学-虚位移原理.ppt

胜利****实阿

1/10

2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共107页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

理论力学-虚位移原理.ppt
§6–4虚功·理想约束§6-1概述虚位移原理是质点系静力学的普遍原理,它将给出任意质点系平衡的充要条件,这和刚体静力学的平衡条件不同,在那里给出的刚体平衡的充要条件,对于任意质点系的平衡来说只是必要的,但并不是充分的(参阅刚化原理)。非自由质点系的平衡,可以理解为主动力通过约束的平衡。约束的作用在于:而虚位移原理则将利用后一种情况,他通过主动力在约束所许可的位移上的表现(通过功的形式)来给出质点系的平衡条件。§6-2约束和约束方程二、约束方程约束对质点系运动的限制可以通过质点系中各质点的坐标和速度以及时间

理论力学-虚位移原理.ppt
第14章虚位移原理举例:杠杆平衡问题。平衡时F1a=F2b若缓慢转过微小角度f,则s1=fa,s2=fb,由动能定理得:-F1s1+F2s2=0,即F1a=F2b和静力学平衡方程得出的结果完全一样。§14-1约束虚位移虚功举例:3.完整约束与非完整约束约束方程中包含坐标对时间的导数项,且不可积分为有限形式时为非完整约束。4.单面约束与双面约束又称为非固执(单面)约束与固执(双面)约束。约束方程为不等式形式时为单面约束。例:O2.虚位移和实位移的比较(1)大小;(2)方向(是否确定、具体);(3)与约束、时

理论力学-第十四章虚位移原理.ppt
第十四章虚位移原理§14–1约束和约束方程§14–2自由度和广义坐标§14–3虚位移§14–4理想约束§14–5虚位移原理§14–6以广义坐标表示的质点系的平衡条件§14–7质点系在势力场中平衡的稳定性引言导弹A追击目标B,要求导弹速度方向总指向目标。§14–1约束和约束方程§14–1约束和约束方程§14–2广义坐标和自由度§14–2广义坐标和自由度§14–2广义坐标和自由度§14–5虚位移原理§14–5虚位移原理§14–5虚位移原理§14–5虚位移原理§14–5虚位移原理§14–5虚位移原理§14–5虚
理论力学经典课件-第八章 虚位移原理与能量法.ppt
从运动中考察系统平衡,建立理想约束模型,引入虚位移,由主动力在虚位移上的虚功关系,给出平衡条件;与达朗贝尔原理结合,构成分析动力学基础。理想约束力不出现,平衡条件必要且充分。8-1约束与位形8-1-1约束及其分类按约束方程不同分类。约束方程不包含质点速度,或包含速度但是可积分的约束,称为完整约束。积分后为完整约束。8-1-2质点系的位形—完全确定系统位置的最少参数,可以是长度,角度,面积等。个数为。定常例如双摆:n=2m=1k=α=3(1)直角坐标形式:8-2-1虚位移8-2-1虚位移——位置函数的变分
《虚位移原理》.ppt
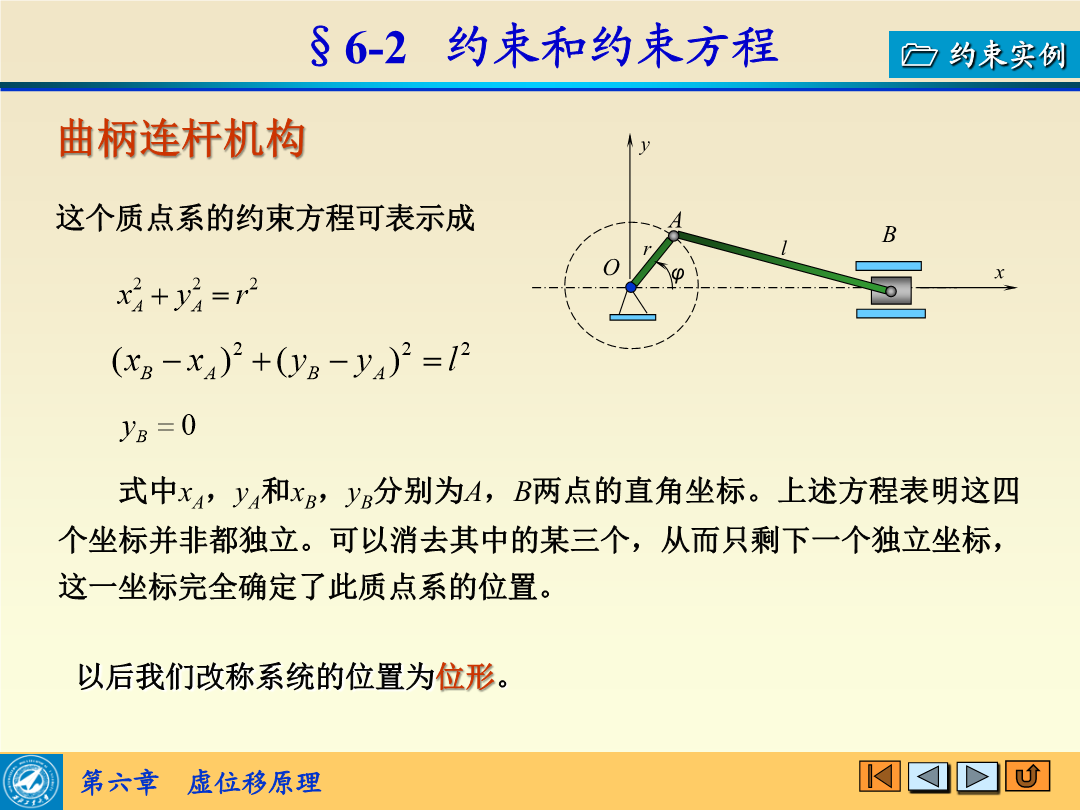
第17章虚位移原理引言§17-1约束及其分类C2.定常约束与非定常约束非定常约束-约束方程中显含时间的约束:3.单面约束与双面约束单面约束——约束方程不能写成等式、但是可以写成不等式的约束。4.完整约束与非完整约束非完整约束——约束方程包含质点速度、且约束方程不可以积分的约束。广义坐标——确定质点系位形的独立参变量。用q1,q2,…表示。§17-3虚位移和理想约束虚位移与实位移的区别和联系2.虚功§17-4虚位移原理∑Fi·ri=0曲柄连杆机构静止在如图所示位置上,已知角度φ和θ。不计机构自身重量,求