
一种协作型机器人关节模块和协作机器人.pdf

Do****76

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种协作型机器人关节模块和协作机器人.pdf
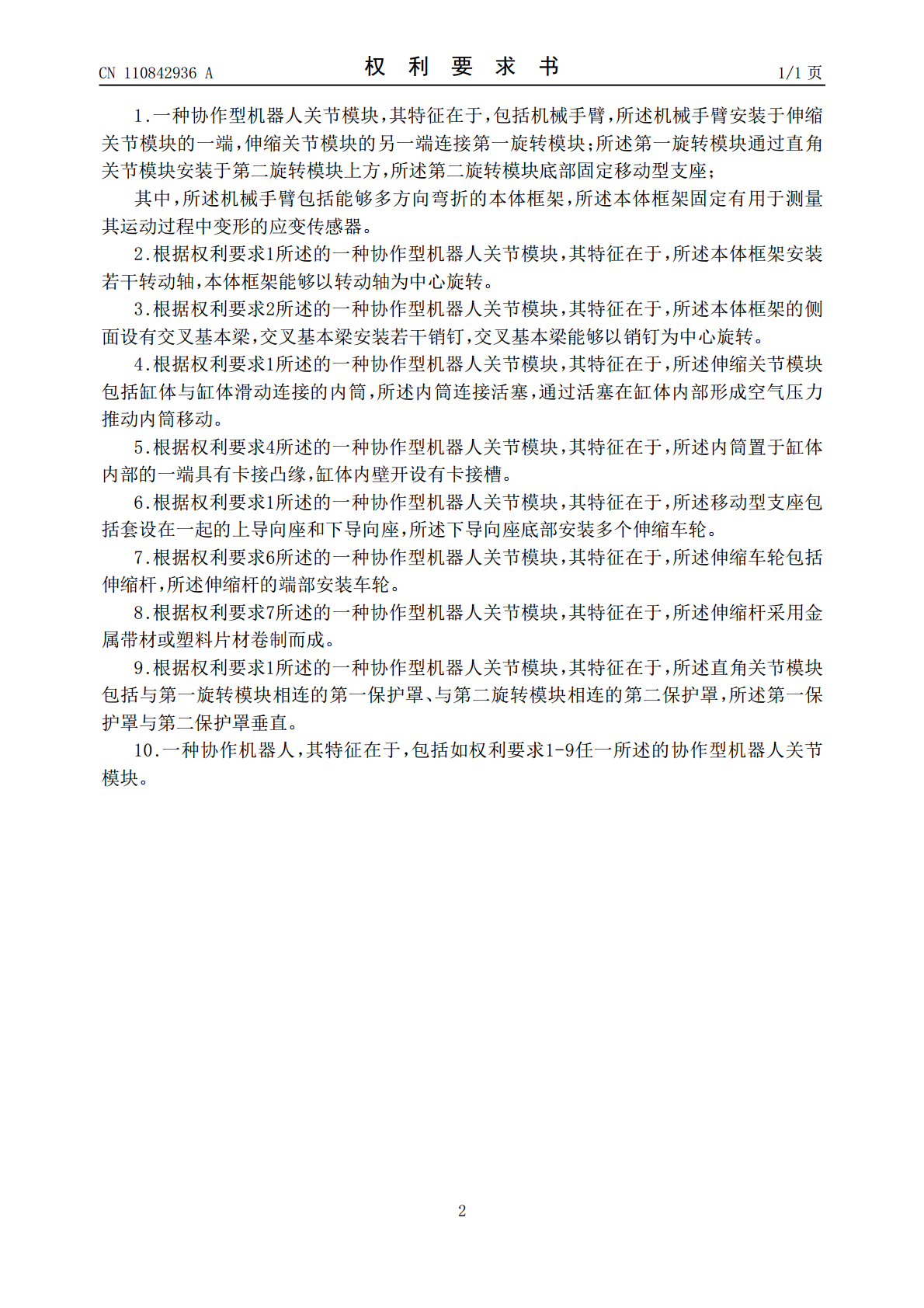
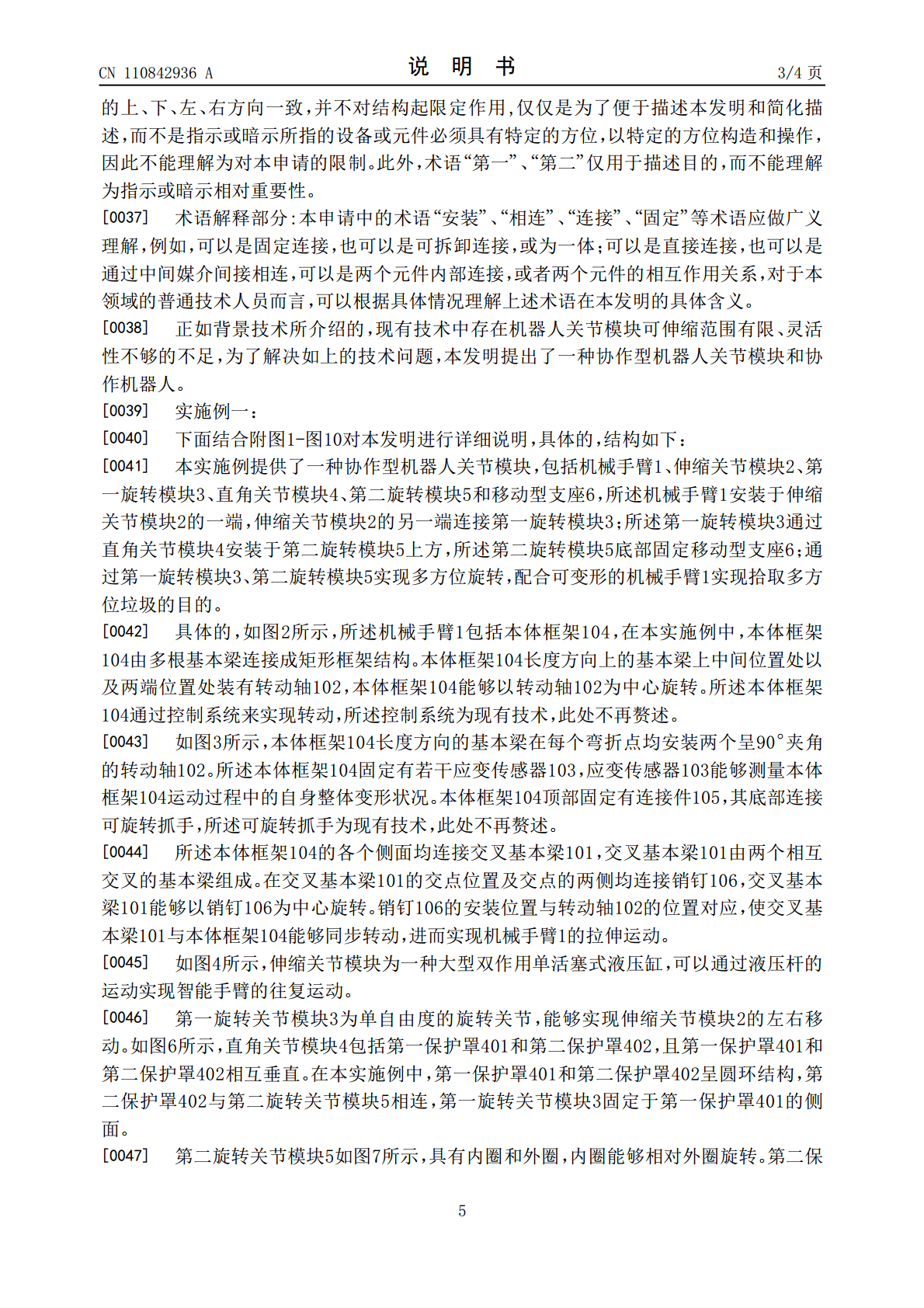
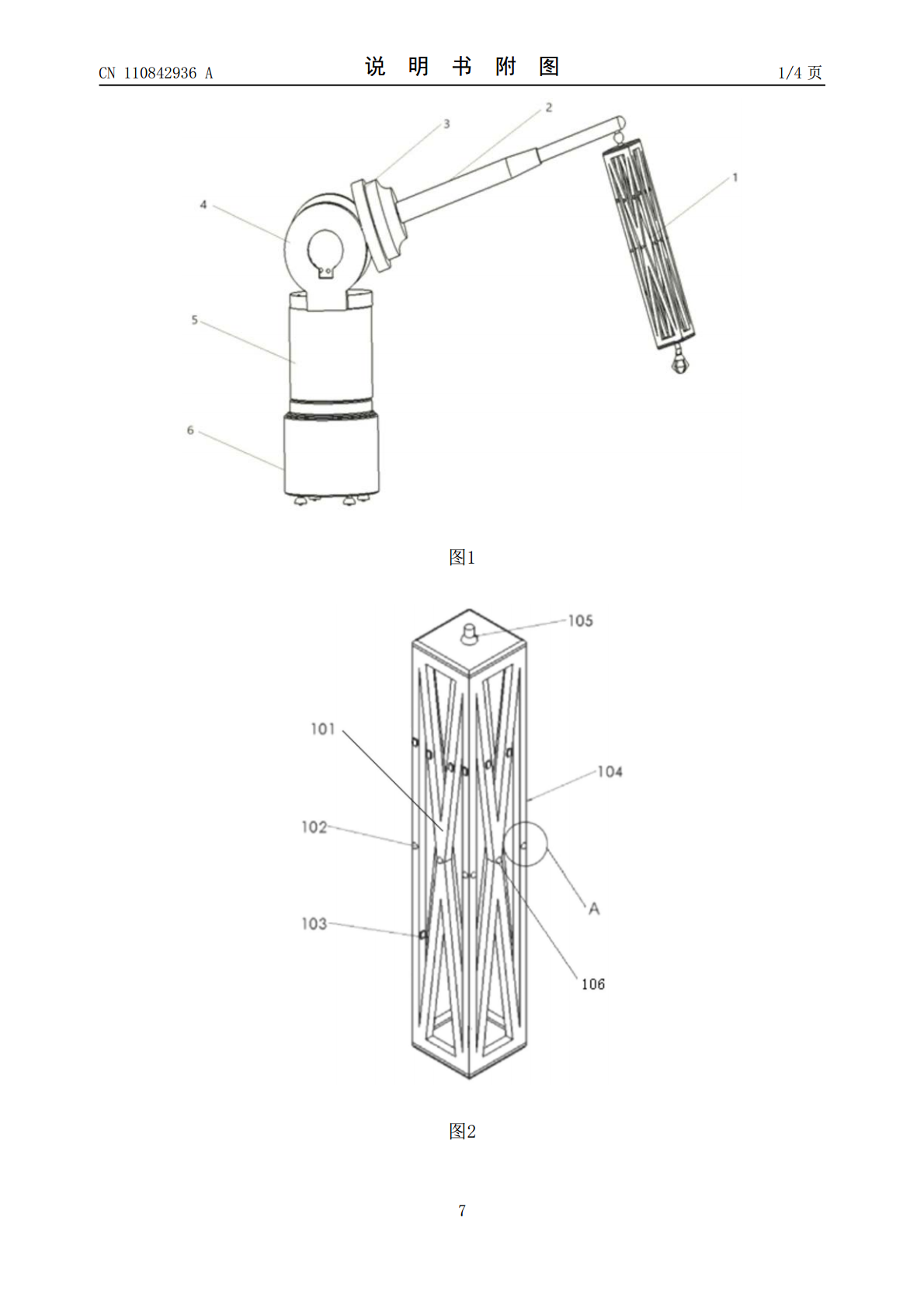
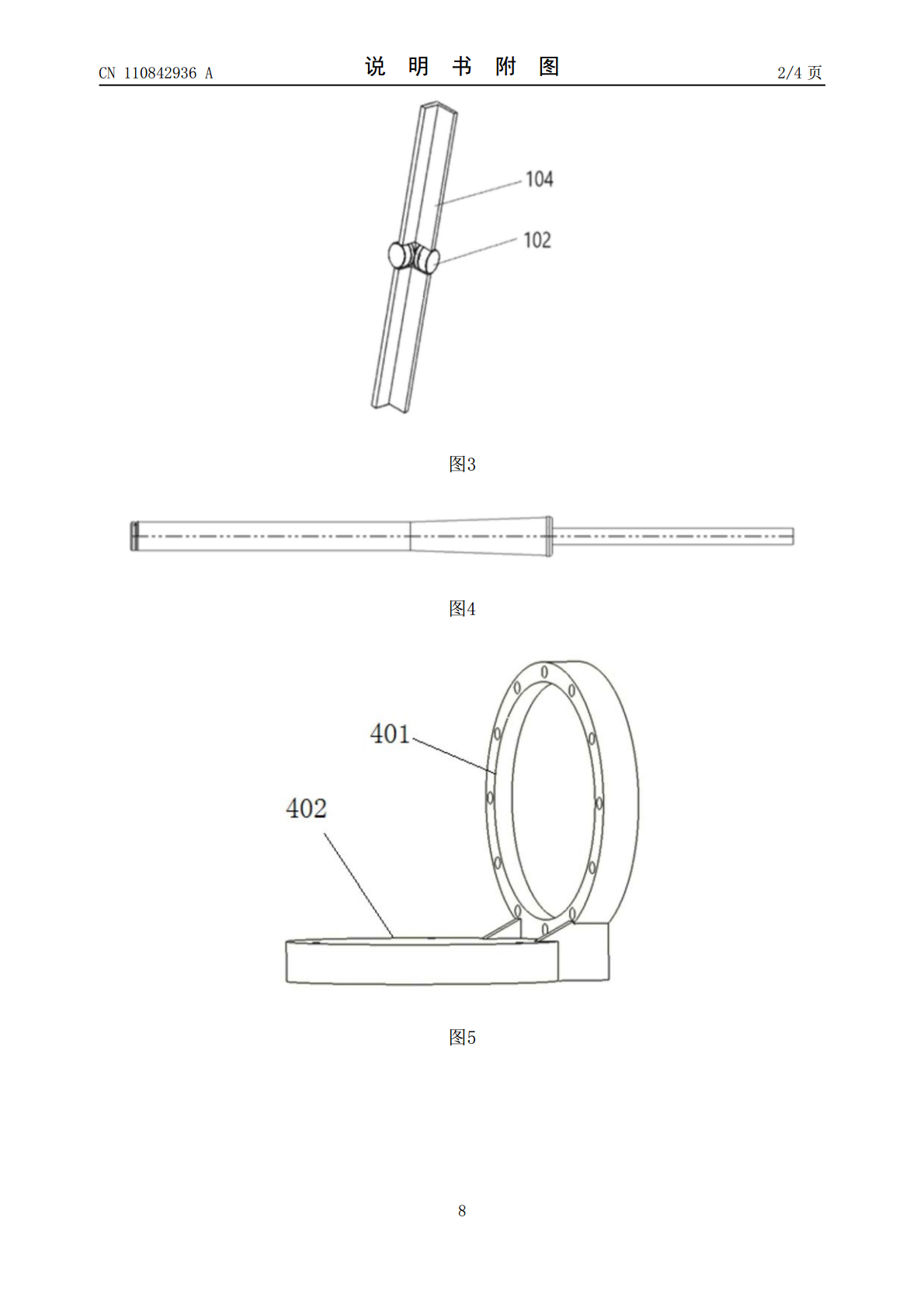
本发明公开了一种协作型机器人关节模块和协作机器人,解决了现有机器人关节模块可伸缩范围有限、灵活性不够等问题,具有能够拾取多方位垃圾、拾取范围大、关节运动灵活的效果。其技术方案为:包括机械手臂,所述机械手臂安装于伸缩关节模块的一端,伸缩关节模块的另一端连接第一旋转模块;所述第一旋转模块通过直角关节模块安装于第二旋转模块上方,所述第二旋转模块底部固定移动型支座;其中,所述机械手臂包括能够多方向弯折的本体框架,所述本体框架固定有用于测量其运动过程中变形的应变传感器。
一种协作机器人模块化球关节.pdf
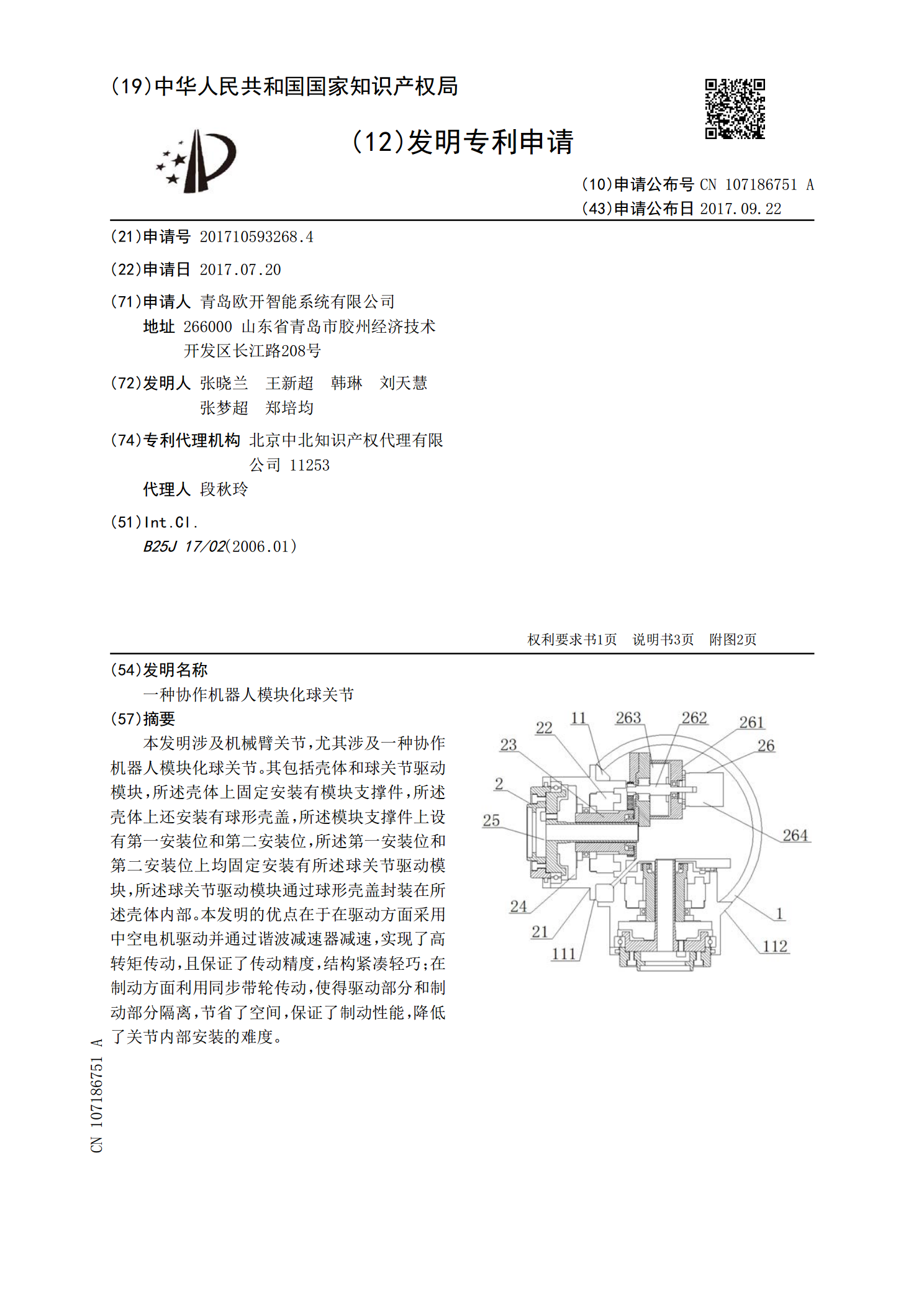
本发明涉及机械臂关节,尤其涉及一种协作机器人模块化球关节。其包括壳体和球关节驱动模块,所述壳体上固定安装有模块支撑件,所述壳体上还安装有球形壳盖,所述模块支撑件上设有第一安装位和第二安装位,所述第一安装位和第二安装位上均固定安装有所述球关节驱动模块,所述球关节驱动模块通过球形壳盖封装在所述壳体内部。本发明的优点在于在驱动方面采用中空电机驱动并通过谐波减速器减速,实现了高转矩传动,且保证了传动精度,结构紧凑轻巧;在制动方面利用同步带轮传动,使得驱动部分和制动部分隔离,节省了空间,保证了制动性能,降低了关节内

关节模组及协作机器人.pdf
本发明涉及自动控制技术领域,特别是涉及一种关节模组及协作机器人。关节模组包括关节驱动件、编码器和送风件。关节驱动件包括驱动定子和驱动转子,驱动定子构造有与外部环境连通的出风口。编码器连接于驱动转子,送风件与编码器沿驱动转子的轴向间隔。编码器、送风机和驱动定子之间形成流动通道,以形成在送风件的作用下灰尘能够依次经过的流动路径,经过流动路径的灰尘经过出风口排出。当送风件运行时,送风件送出的气流能够将流动通道内的灰尘例如制动器摩擦产生的灰尘,经出风口排出到关节模组外部。通过将关节模组内部的灰尘吹出,保持编码器所

一种协作机器人关节上的连接结构.pdf
本发明公开了一种协作机器人关节上的连接结构,包括第一连接法兰和第二连接法兰,所述第一连接法兰和所述第二连接法兰之间通过环形卡扣连接在一起,所述第一连接法兰和所述第二连接法兰之间还通过干个连接螺钉固定锁紧,所述第一连接法兰和所述第二连接法兰的轴心线相重合,且所述连接螺钉的轴心线与所述第一连接法兰的轴心线存在夹角。本发明其有利于解决在装配时存在锥面易滑动、锥面螺钉受力不均匀以及轴向位置安装一致性较差的问题。

正压型防爆协作机器人.pdf
本发明提供正压型防爆协作机器人,涉及防爆协作机器人技术领域,包括底座,所述底座外表固定连接有防爆总线接头,所述底座内表面固定连接有第一关节法兰,所述第一关节法兰上表面转动连接有第一关节模组,所述第一关节模组外表面固定连接有第一关节壳体。本发明通过内部留有气体通道,可以持续充入保护性气体,如经过多重过滤、干燥的新鲜空气,使得设备内部的气压高于外部气压,使得外部的可燃性气体不能进入或者形不成达到爆炸的浓度;同时可辅助在协作机器人内部配设有气体压力检测、可燃性气体浓度报警装置,一旦发生压力不足,可燃性气体浓度高