
正压型防爆协作机器人.pdf

是你****平呀

1/8

2/8
3/8

4/8
5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

正压型防爆协作机器人.pdf
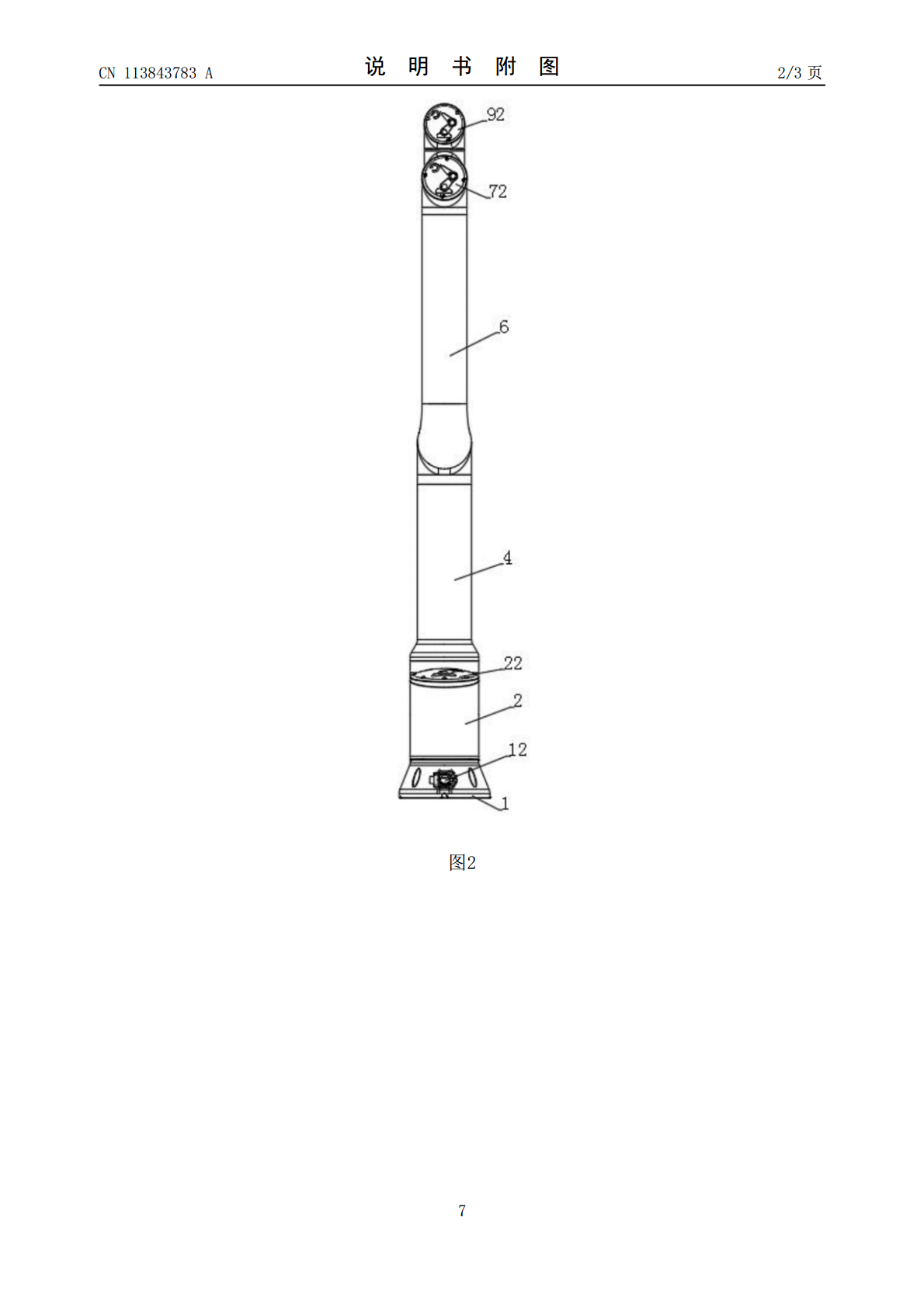
本发明提供正压型防爆协作机器人,涉及防爆协作机器人技术领域,包括底座,所述底座外表固定连接有防爆总线接头,所述底座内表面固定连接有第一关节法兰,所述第一关节法兰上表面转动连接有第一关节模组,所述第一关节模组外表面固定连接有第一关节壳体。本发明通过内部留有气体通道,可以持续充入保护性气体,如经过多重过滤、干燥的新鲜空气,使得设备内部的气压高于外部气压,使得外部的可燃性气体不能进入或者形不成达到爆炸的浓度;同时可辅助在协作机器人内部配设有气体压力检测、可燃性气体浓度报警装置,一旦发生压力不足,可燃性气体浓度高
正压型防爆电机的防爆原理与设计.pdf
防爆电机(EXPLOSION—PROOFELECTRICMACHINE)第4320卷08(蔻嚣学期)正压型防爆电机的防爆原理与设计许春家佳木斯电机股份有限公司,黑龙江佳木斯(154oo2)摘要介绍正压型防爆电机的防爆原理、防爆型式。从其结构设计,安全措施等方面进行分析,论述了电机在结构设计中应注意的关键技术问题,为设计制造正压型防爆电机提供了参考。关量词正压型;防爆;换气中图分类号TM357文献标识码A文章编号1008.7281(2008)04-0008-04F_xplosion-ProofPrincip
一种正压型防爆分析小屋.pdf
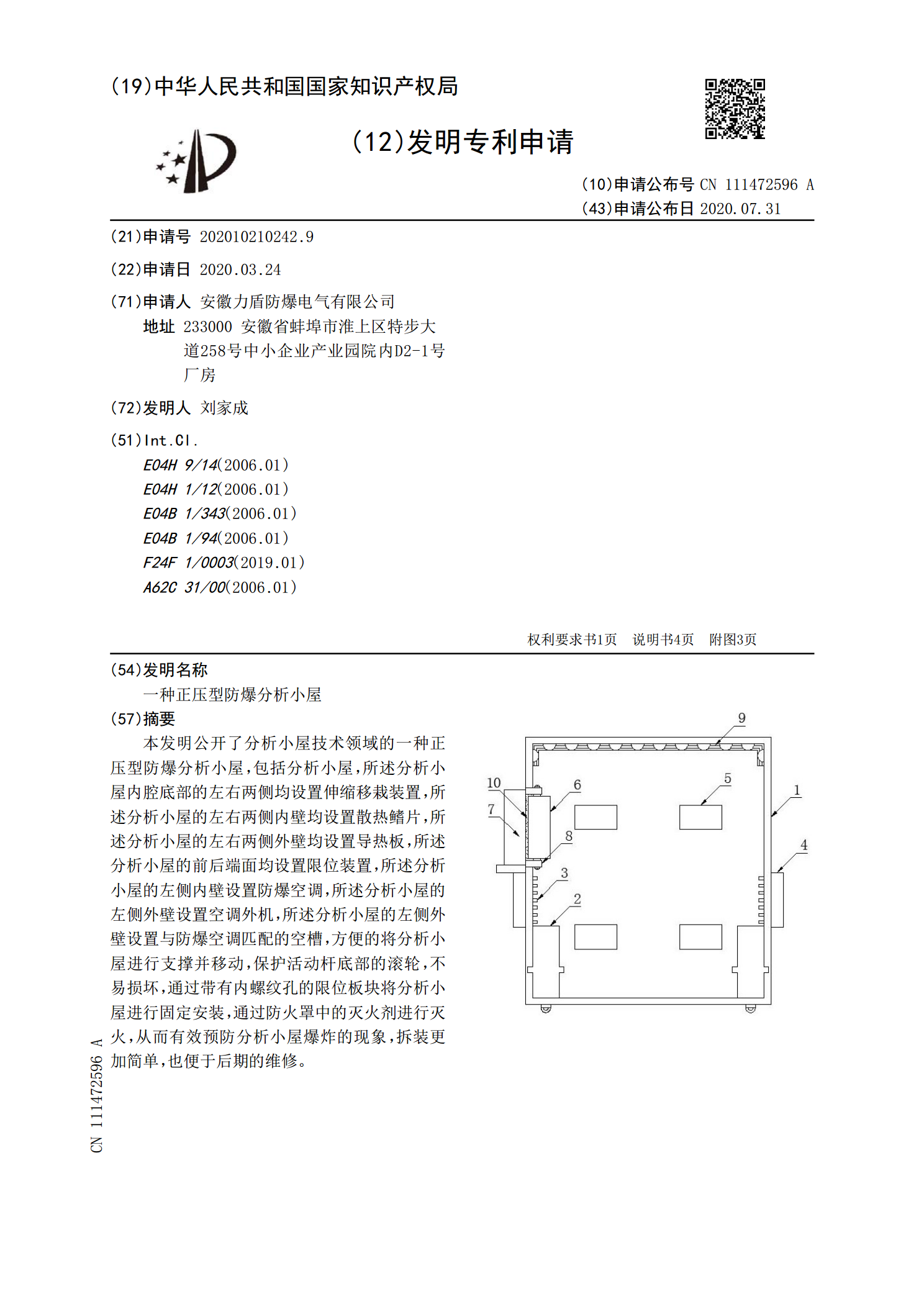
本发明公开了分析小屋技术领域的一种正压型防爆分析小屋,包括分析小屋,所述分析小屋内腔底部的左右两侧均设置伸缩移栽装置,所述分析小屋的左右两侧内壁均设置散热鳍片,所述分析小屋的左右两侧外壁均设置导热板,所述分析小屋的前后端面均设置限位装置,所述分析小屋的左侧内壁设置防爆空调,所述分析小屋的左侧外壁设置空调外机,所述分析小屋的左侧外壁设置与防爆空调匹配的空槽,方便的将分析小屋进行支撑并移动,保护活动杆底部的滚轮,不易损坏,通过带有内螺纹孔的限位板块将分析小屋进行固定安装,通过防火罩中的灭火剂进行灭火,从而有效
一种正压型防爆配电柜.pdf
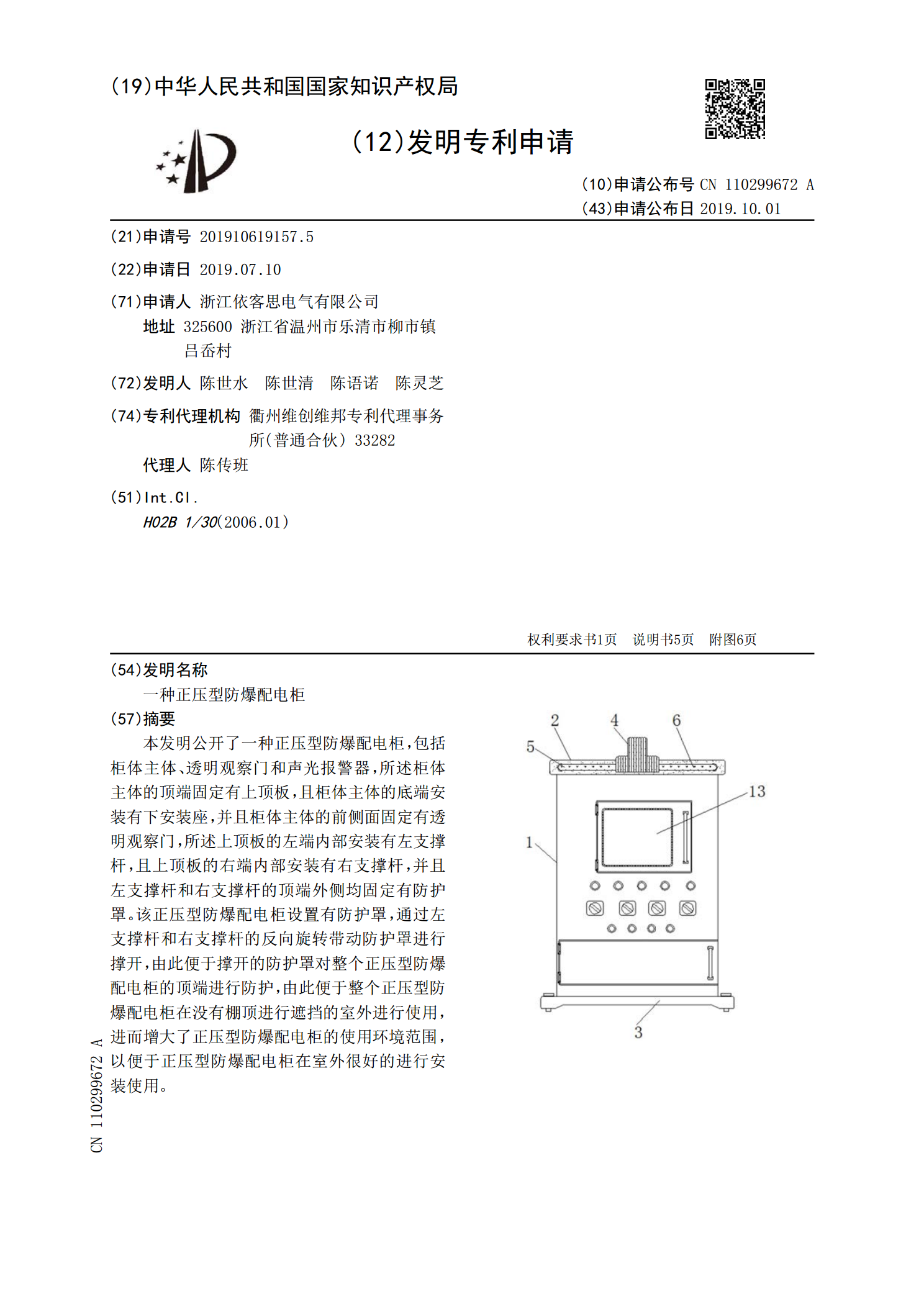
本发明公开了一种正压型防爆配电柜,包括柜体主体、透明观察门和声光报警器,所述柜体主体的顶端固定有上顶板,且柜体主体的底端安装有下安装座,并且柜体主体的前侧面固定有透明观察门,所述上顶板的左端内部安装有左支撑杆,且上顶板的右端内部安装有右支撑杆,并且左支撑杆和右支撑杆的顶端外侧均固定有防护罩。该正压型防爆配电柜设置有防护罩,通过左支撑杆和右支撑杆的反向旋转带动防护罩进行撑开,由此便于撑开的防护罩对整个正压型防爆配电柜的顶端进行防护,由此便于整个正压型防爆配电柜在没有棚顶进行遮挡的室外进行使用,进而增大了正压
正压型防爆电机仪表风过滤沉降装置.pdf
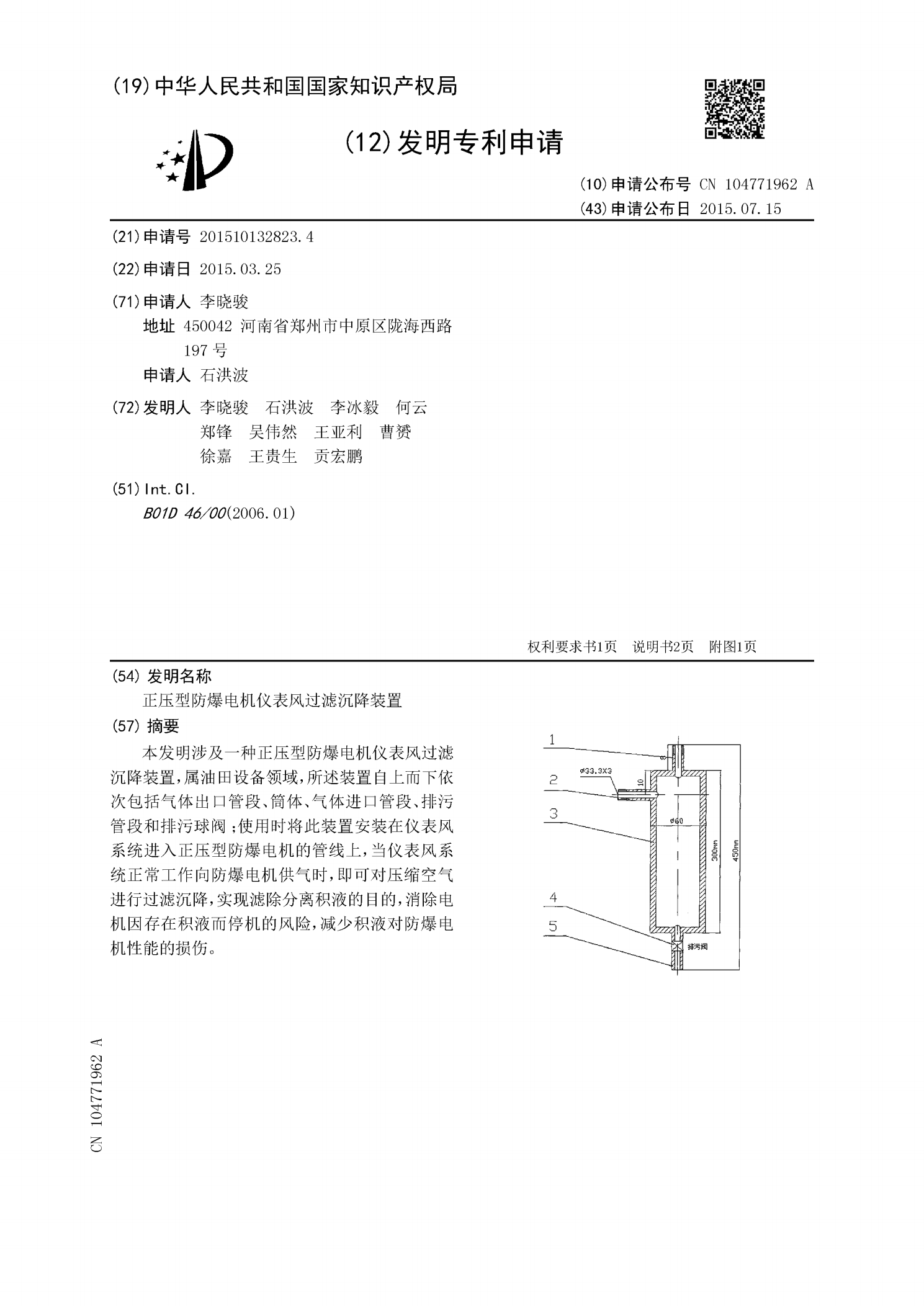
本发明涉及一种正压型防爆电机仪表风过滤沉降装置,属油田设备领域,所述装置自上而下依次包括气体出口管段、筒体、气体进口管段、排污管段和排污球阀;使用时将此装置安装在仪表风系统进入正压型防爆电机的管线上,当仪表风系统正常工作向防爆电机供气时,即可对压缩空气进行过滤沉降,实现滤除分离积液的目的,消除电机因存在积液而停机的风险,减少积液对防爆电机性能的损伤。