
一种协作机器人模块化球关节.pdf

一只****呀盟

1/7
2/7
3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种协作机器人模块化球关节.pdf
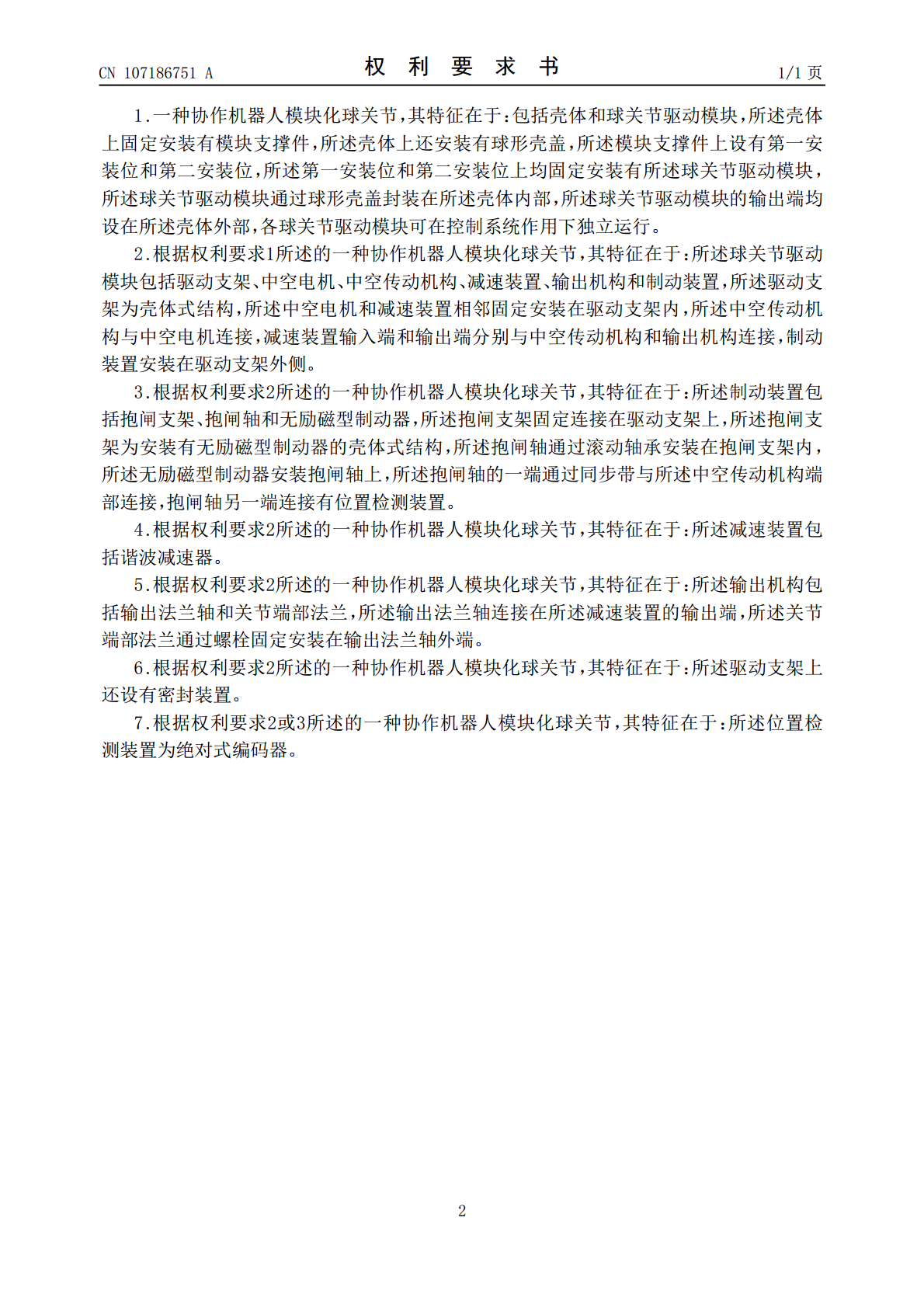
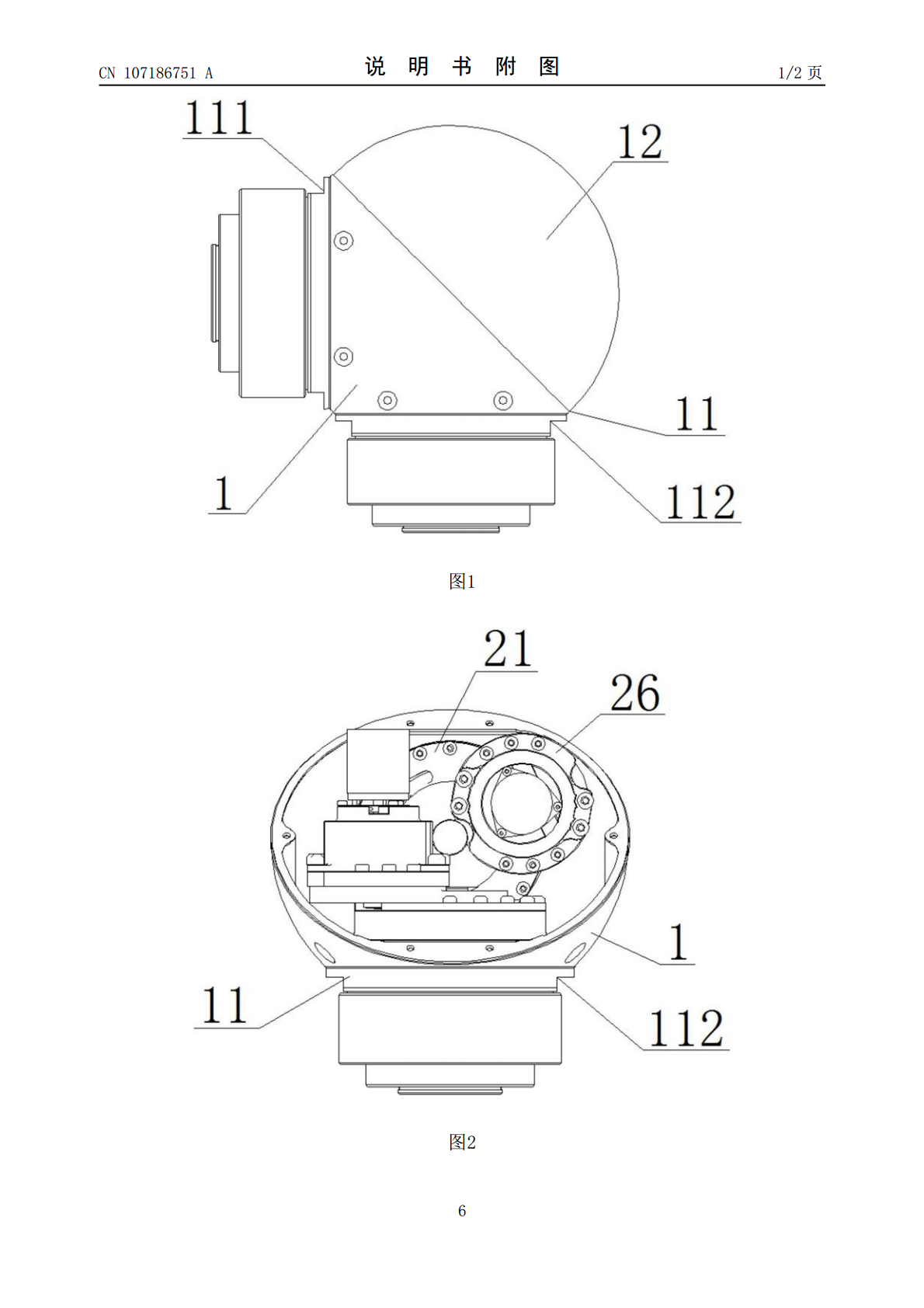
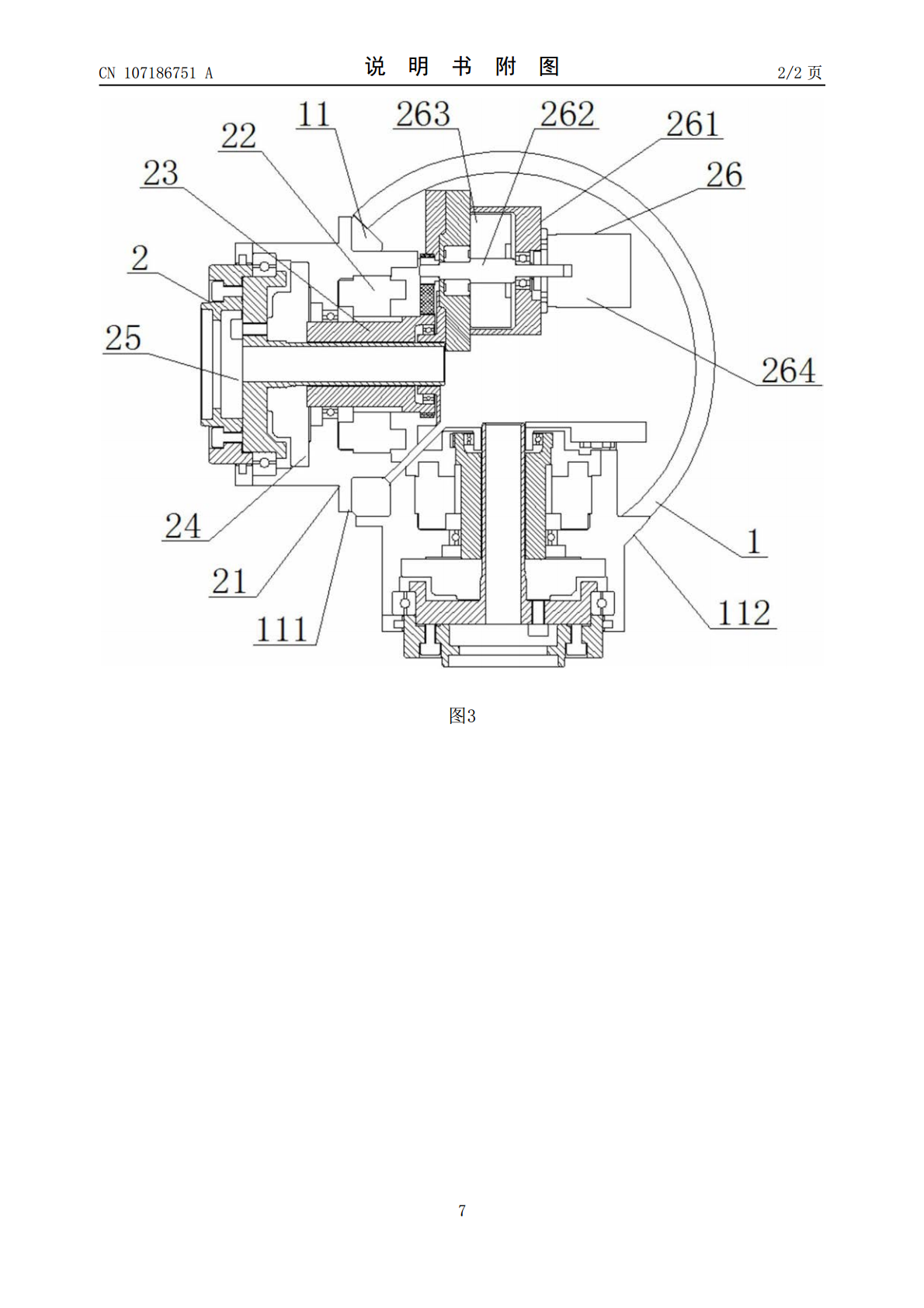
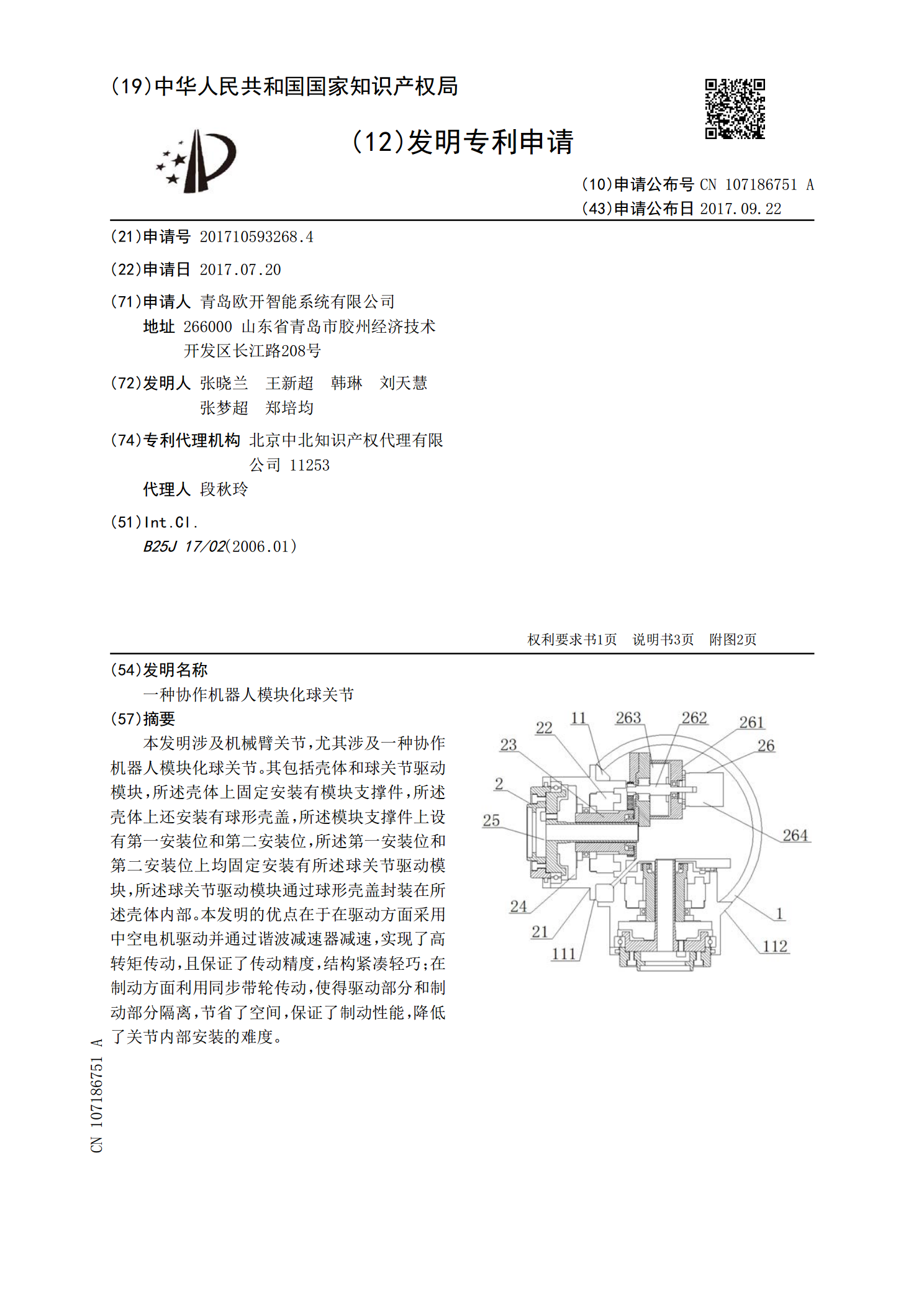
本发明涉及机械臂关节,尤其涉及一种协作机器人模块化球关节。其包括壳体和球关节驱动模块,所述壳体上固定安装有模块支撑件,所述壳体上还安装有球形壳盖,所述模块支撑件上设有第一安装位和第二安装位,所述第一安装位和第二安装位上均固定安装有所述球关节驱动模块,所述球关节驱动模块通过球形壳盖封装在所述壳体内部。本发明的优点在于在驱动方面采用中空电机驱动并通过谐波减速器减速,实现了高转矩传动,且保证了传动精度,结构紧凑轻巧;在制动方面利用同步带轮传动,使得驱动部分和制动部分隔离,节省了空间,保证了制动性能,降低了关节内

一种协作型机器人关节模块和协作机器人.pdf
本发明公开了一种协作型机器人关节模块和协作机器人,解决了现有机器人关节模块可伸缩范围有限、灵活性不够等问题,具有能够拾取多方位垃圾、拾取范围大、关节运动灵活的效果。其技术方案为:包括机械手臂,所述机械手臂安装于伸缩关节模块的一端,伸缩关节模块的另一端连接第一旋转模块;所述第一旋转模块通过直角关节模块安装于第二旋转模块上方,所述第二旋转模块底部固定移动型支座;其中,所述机械手臂包括能够多方向弯折的本体框架,所述本体框架固定有用于测量其运动过程中变形的应变传感器。

一种模块化机器人驱动关节.pdf
本发明涉及一种模块化机器人驱动关节,由机械部分和控制部分组成,机械部分包括:驱动关节L型托架、平面侧板、液压摆动缸、摆动缸齿轮、电位器齿轮、电位器连接块、液压摆动缸垫块,摆动缸垫板A、摆动缸垫板B、固定端盖、电机与液压泵支架、联轴器,控制部分包括:上位机、电位器传感器、控制信号卡、流量计、液压泵、液压泵驱动电机。本发明通过建立的液压泵流量和驱动关节液压摆动缸转动角度之间的函数关系,对其进行适时调节,因而形成闭环反馈回路,实现对液压摆动缸的精确控制;该机器人液压驱动关节可输出更大的扭矩,结构简单,具有模块化
一种模块化蛇形机器人关节.pdf
一种模块化蛇形机器人关节,它涉及一种蛇形机器人关节。现有的蛇形关节因采用舵机驱动和齿轮传动的配合方式导致反向齿隙大、控制周期长、精度低以及位置镇定能力差的问题。本发明包括关节输入件、关节输出件、中间轴节、电机组件和谐波减速器,所述中间轴节的两端分别设置有关节输入件和关节输出件,所述电机组件和谐波减速器并列设置在中间轴节的内部,电机组件的输出端与谐波减速器相连接,电机组件带动谐波减速器转动,谐波减速器带动关节输出件执行以中间轴节为轴心的摆动运动。本发明通过设置力矩传感器和关节输出端位置传感器,以测量蛇形机器

一种高度集成模块化机器人关节.pdf
本发明属于机器人设计领域,具体是一种高度集成的模块化机器人关节,包括关节定子,以及关节定子外圈上的一对转动轴承,轴承上安装关节输出法兰,所述的关节输出法兰内侧安装力矩传感器和位置传感器,并且与柔轮的输出端固联,所述关节定子内圈上安装一对转动轴承,轴承上安装关节转子,所述的关节转子的一端设计有波发生器,波发生器安装在柔轮上,柔轮的外齿与关节定子内圈上设计的齿圈内齿啮合,关节驱动电路板和关节控制电路板通过螺钉固定在关节定子上,所述套筒固定在轴承端盖上。本发明采用融合设计的方法,将电机、谐波减速机以及结构件等进