
水导激光定位方法、装置、存储介质和水导激光设备.pdf

一只****呀淑

1/10
2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

水导激光定位方法、装置、存储介质和水导激光设备.pdf
本申请公开了一种水导激光定位方法、装置、存储介质和水导激光设备。方法包括:对水导激光设备进行标定;控制相机对承载装置进行拍摄,得到工装图像;对工装图像进行处理,确定承载装置在相机坐标系下的第一基准点的基准坐标和第一基准方向;根据第一基准点的基准坐标和第一基准方向,确定发射装置的运动轴方向相对于第一基准方向的校正角度,以及确定发射装置的水射流相对于第一基准点的校正位移;按照校正角度控制承载装置旋转,以使发射装置的运动轴的Y正方向与第一基准方向一致;和/或,按照校正位移控制发射装置移动,以使水射流中心位于第一
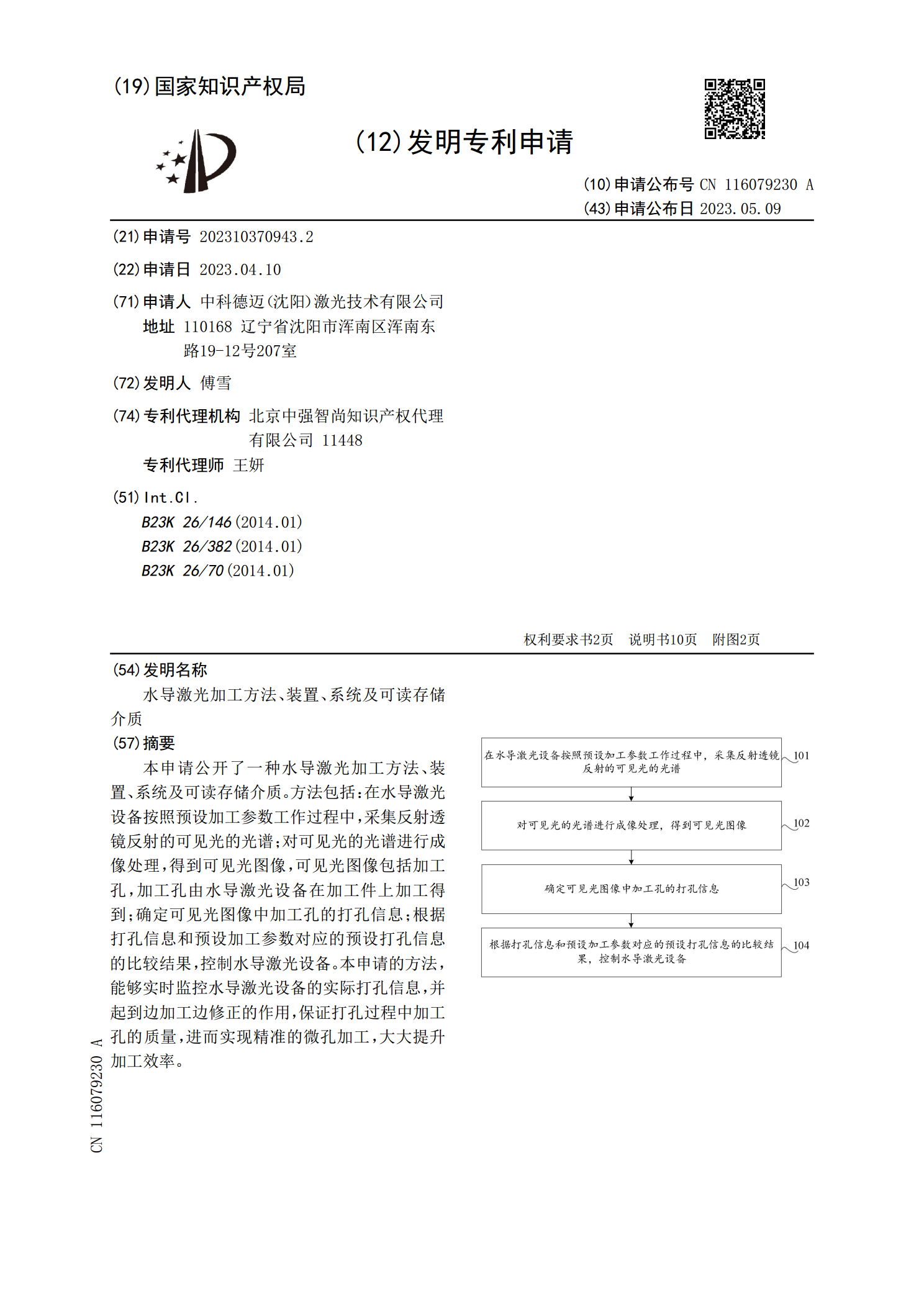
水导激光加工方法、装置、系统及可读存储介质.pdf
本申请公开了一种水导激光加工方法、装置、系统及可读存储介质。方法包括:在水导激光设备按照预设加工参数工作过程中,采集反射透镜反射的可见光的光谱;对可见光的光谱进行成像处理,得到可见光图像,可见光图像包括加工孔,加工孔由水导激光设备在加工件上加工得到;确定可见光图像中加工孔的打孔信息;根据打孔信息和预设加工参数对应的预设打孔信息的比较结果,控制水导激光设备。本申请的方法,能够实时监控水导激光设备的实际打孔信息,并起到边加工边修正的作用,保证打孔过程中加工孔的质量,进而实现精准的微孔加工,大大提升加工效率。
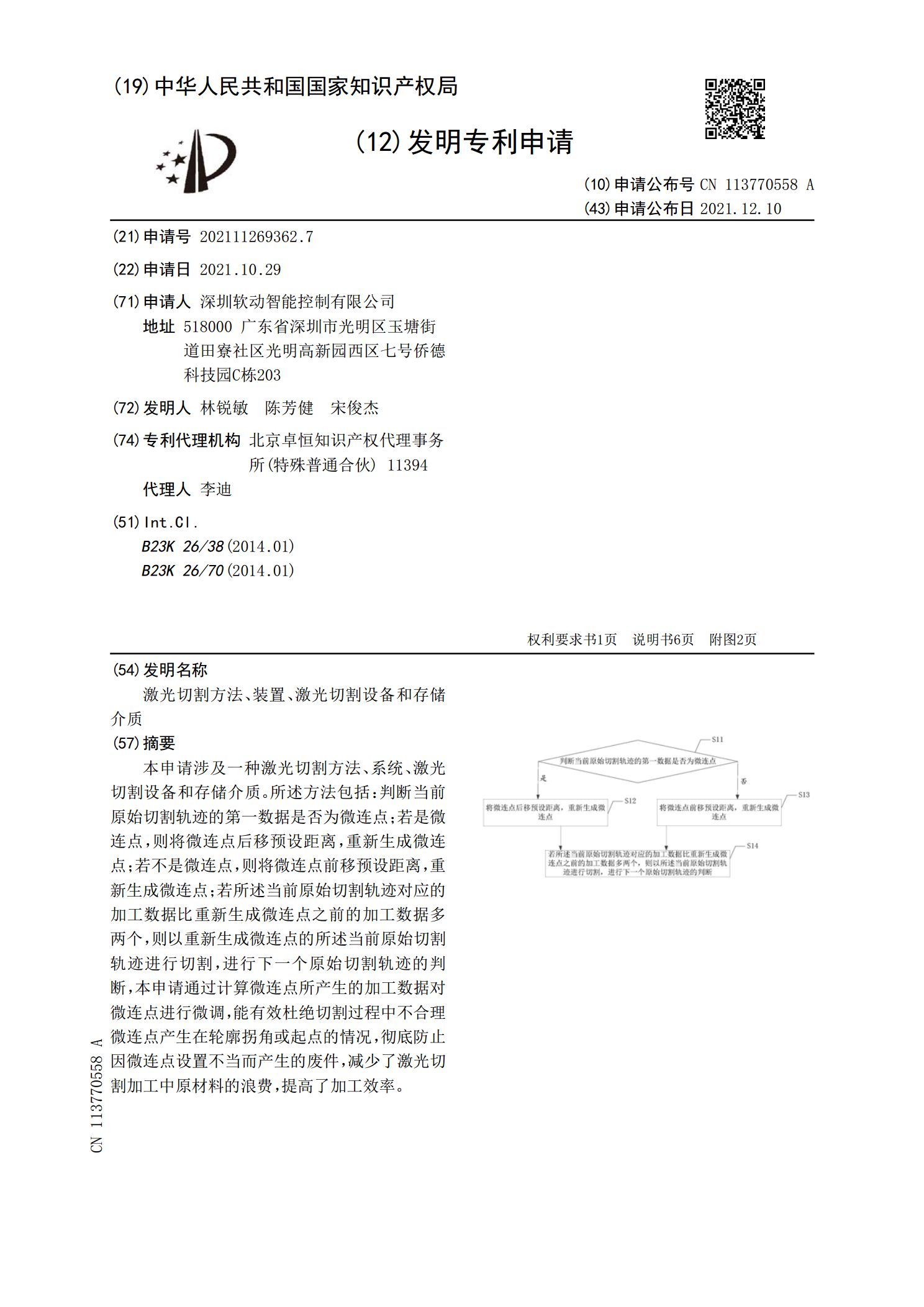
激光切割方法、装置、激光切割设备和存储介质.pdf
本申请涉及一种激光切割方法、系统、激光切割设备和存储介质。所述方法包括:判断当前原始切割轨迹的第一数据是否为微连点;若是微连点,则将微连点后移预设距离,重新生成微连点;若不是微连点,则将微连点前移预设距离,重新生成微连点;若所述当前原始切割轨迹对应的加工数据比重新生成微连点之前的加工数据多两个,则以重新生成微连点的所述当前原始切割轨迹进行切割,进行下一个原始切割轨迹的判断,本申请通过计算微连点所产生的加工数据对微连点进行微调,能有效杜绝切割过程中不合理微连点产生在轮廓拐角或起点的情况,彻底防止因微连点设置
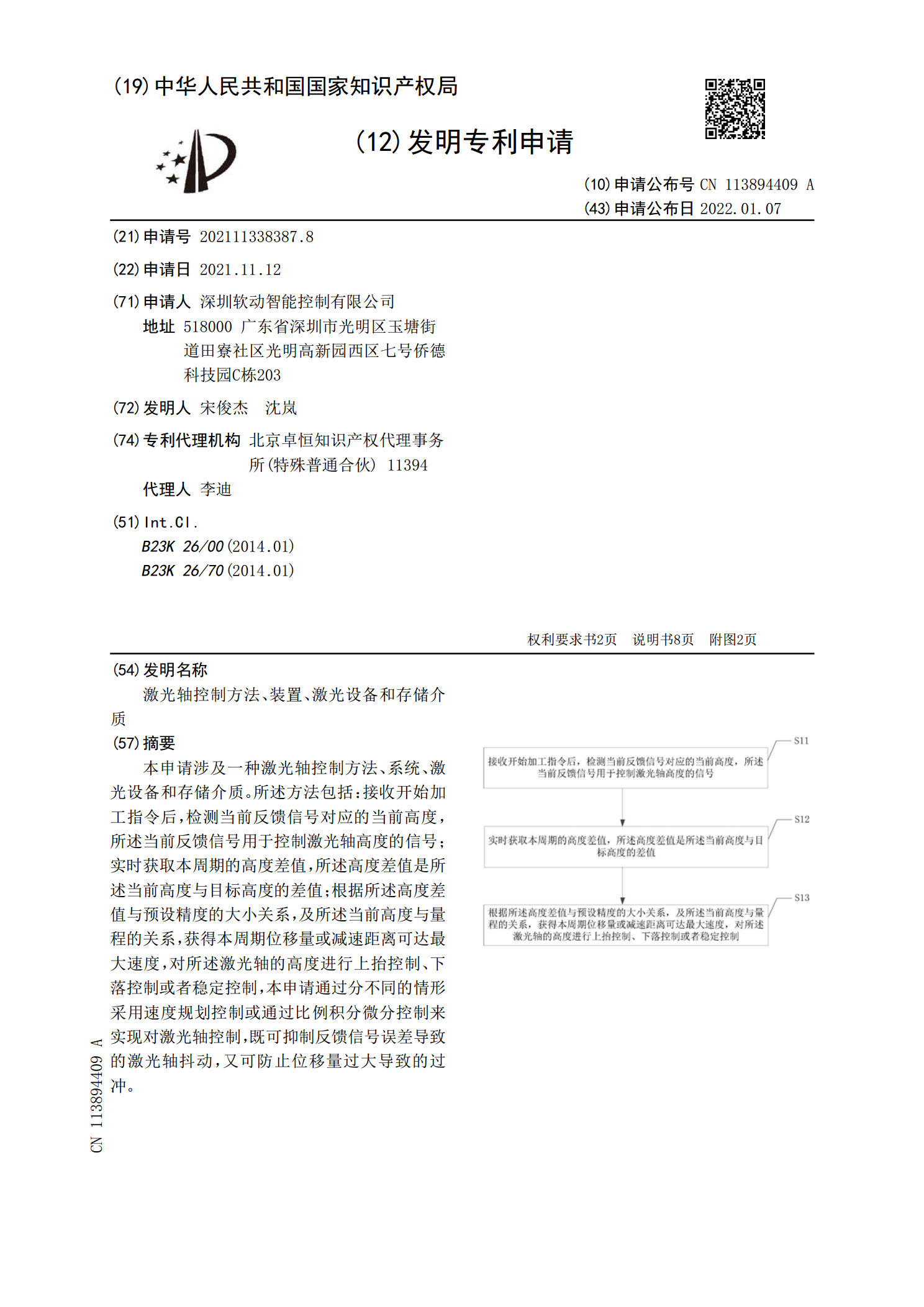
激光轴控制方法、装置、激光设备和存储介质.pdf
本申请涉及一种激光轴控制方法、系统、激光设备和存储介质。所述方法包括:接收开始加工指令后,检测当前反馈信号对应的当前高度,所述当前反馈信号用于控制激光轴高度的信号;实时获取本周期的高度差值,所述高度差值是所述当前高度与目标高度的差值;根据所述高度差值与预设精度的大小关系,及所述当前高度与量程的关系,获得本周期位移量或减速距离可达最大速度,对所述激光轴的高度进行上抬控制、下落控制或者稳定控制,本申请通过分不同的情形采用速度规划控制或通过比例积分微分控制来实现对激光轴控制,既可抑制反馈信号误差导致的激光轴抖动

激光加工方法及装置、激光加工设备、存储介质.pdf
本发明揭示了一种方法激光加工方法及装置,所述方法包括:根据所述激光加工设备的启动指令,对激光加工设备中蜂窝板上放置的待加工物体和待加工图案获取拍摄图像;对所述拍摄图像识别加工区域和图案区域,获得所述待加工物体的材料信息和描述所述待加工图案的图案信息,所述加工区域为所述拍摄图像中待加工物体所对应的图像区域;根据所述材料信息和图案信息,控制所述激光加工设备将所述待加工图案加工至所述待加工物体。采用本方法极大地提升了激光加工设备进行激光加工的自动化程度。