
激光轴控制方法、装置、激光设备和存储介质.pdf

绮兰****文章

1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
激光轴控制方法、装置、激光设备和存储介质.pdf
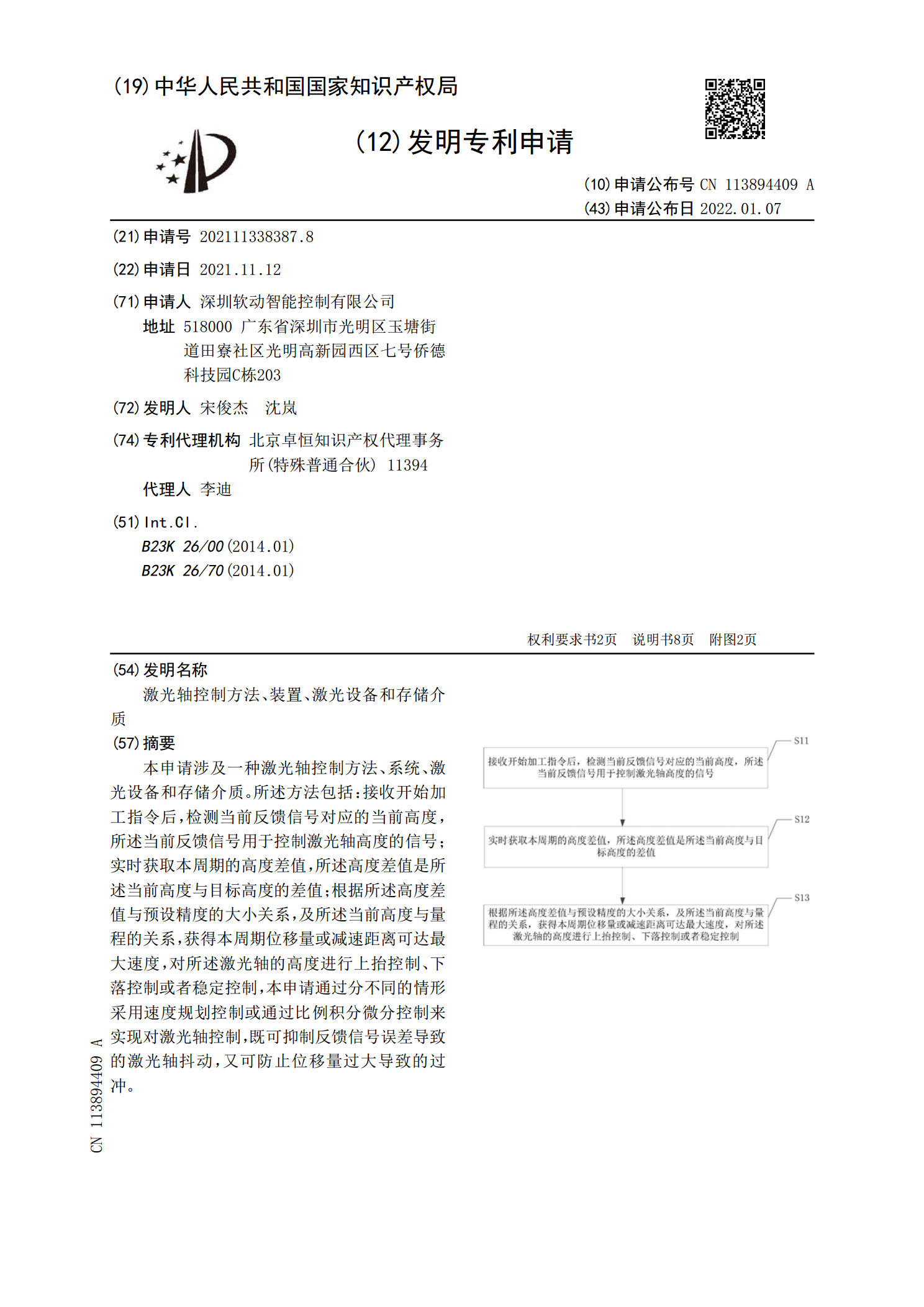
本申请涉及一种激光轴控制方法、系统、激光设备和存储介质。所述方法包括:接收开始加工指令后,检测当前反馈信号对应的当前高度,所述当前反馈信号用于控制激光轴高度的信号;实时获取本周期的高度差值,所述高度差值是所述当前高度与目标高度的差值;根据所述高度差值与预设精度的大小关系,及所述当前高度与量程的关系,获得本周期位移量或减速距离可达最大速度,对所述激光轴的高度进行上抬控制、下落控制或者稳定控制,本申请通过分不同的情形采用速度规划控制或通过比例积分微分控制来实现对激光轴控制,既可抑制反馈信号误差导致的激光轴抖动
激光的控制方法和装置、存储介质及电子装置.pdf
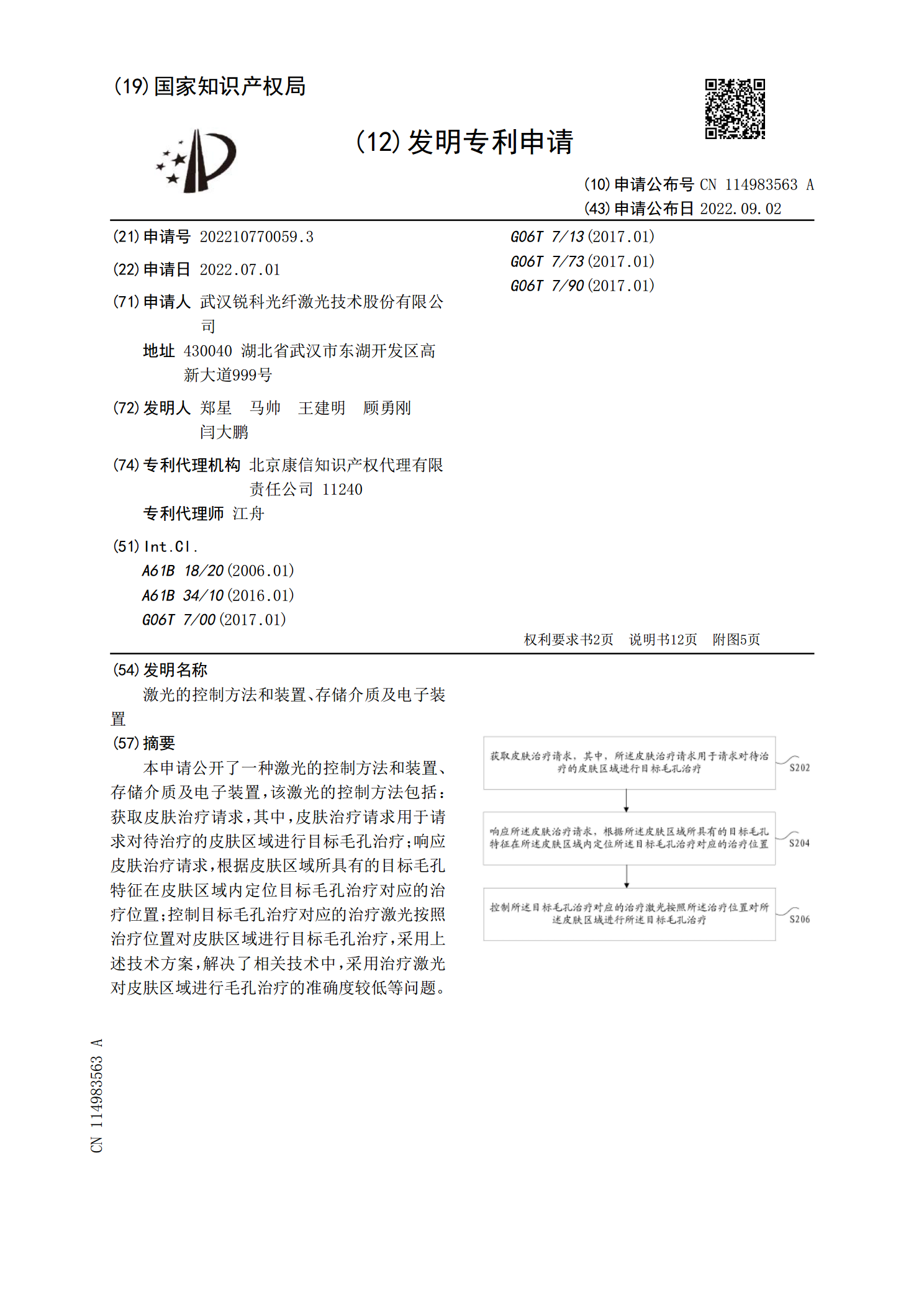
本申请公开了一种激光的控制方法和装置、存储介质及电子装置,该激光的控制方法包括:获取皮肤治疗请求,其中,皮肤治疗请求用于请求对待治疗的皮肤区域进行目标毛孔治疗;响应皮肤治疗请求,根据皮肤区域所具有的目标毛孔特征在皮肤区域内定位目标毛孔治疗对应的治疗位置;控制目标毛孔治疗对应的治疗激光按照治疗位置对皮肤区域进行目标毛孔治疗,采用上述技术方案,解决了相关技术中,采用治疗激光对皮肤区域进行毛孔治疗的准确度较低等问题。
激光切割方法、装置、激光切割设备和存储介质.pdf
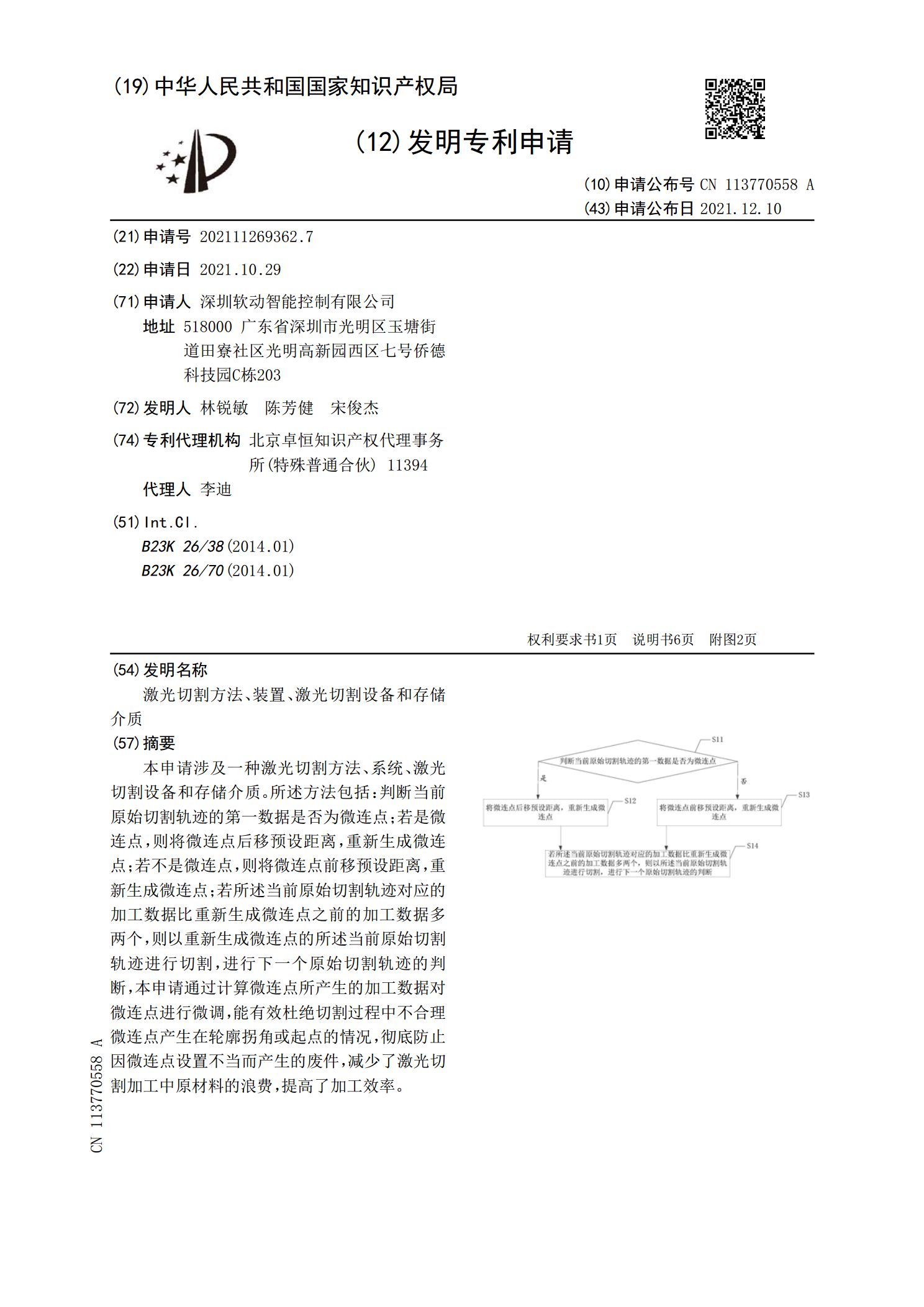
本申请涉及一种激光切割方法、系统、激光切割设备和存储介质。所述方法包括:判断当前原始切割轨迹的第一数据是否为微连点;若是微连点,则将微连点后移预设距离,重新生成微连点;若不是微连点,则将微连点前移预设距离,重新生成微连点;若所述当前原始切割轨迹对应的加工数据比重新生成微连点之前的加工数据多两个,则以重新生成微连点的所述当前原始切割轨迹进行切割,进行下一个原始切割轨迹的判断,本申请通过计算微连点所产生的加工数据对微连点进行微调,能有效杜绝切割过程中不合理微连点产生在轮廓拐角或起点的情况,彻底防止因微连点设置
激光加工控制方法、装置、设备及存储介质.pdf
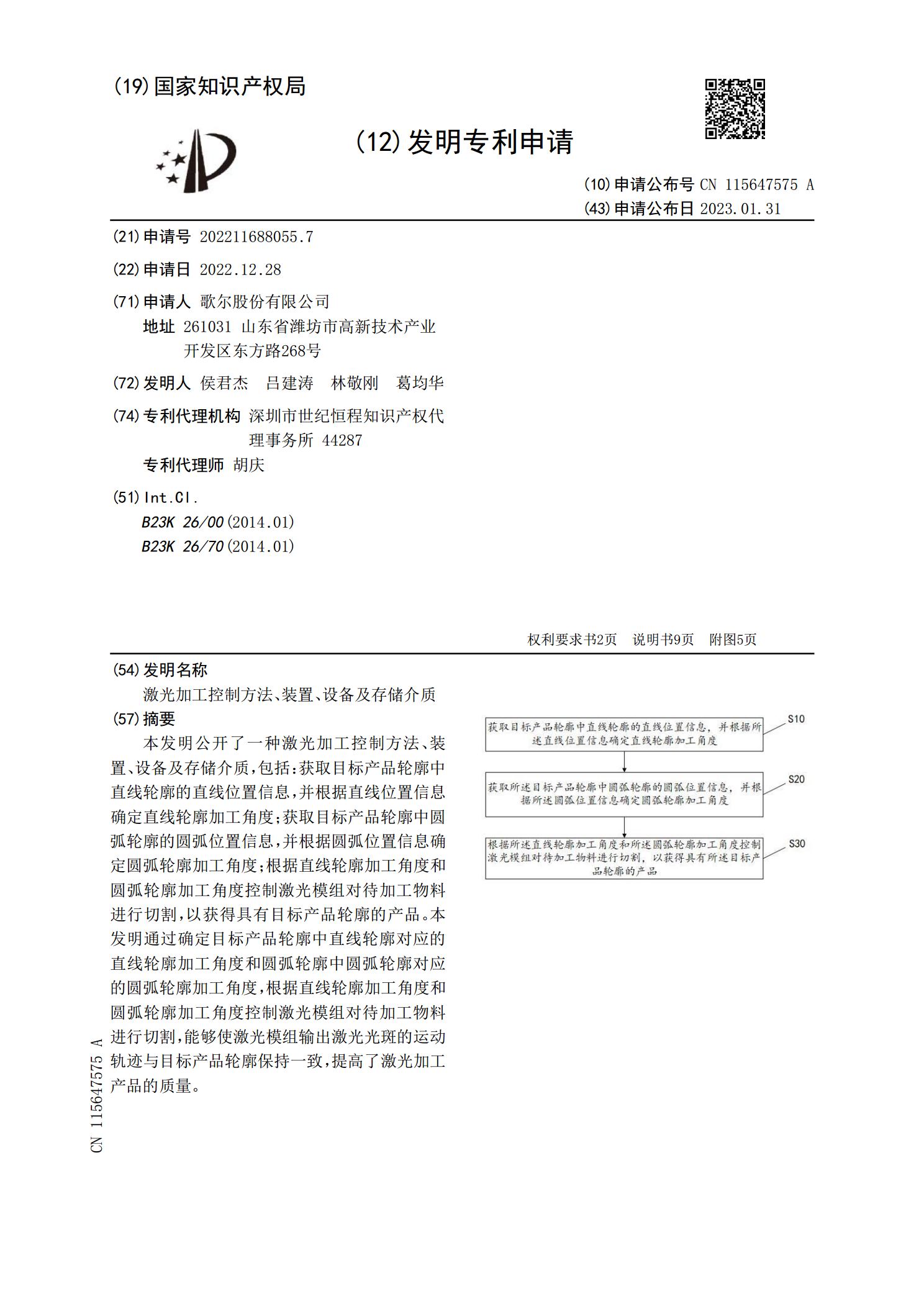
本发明公开了一种激光加工控制方法、装置、设备及存储介质,包括:获取目标产品轮廓中直线轮廓的直线位置信息,并根据直线位置信息确定直线轮廓加工角度;获取目标产品轮廓中圆弧轮廓的圆弧位置信息,并根据圆弧位置信息确定圆弧轮廓加工角度;根据直线轮廓加工角度和圆弧轮廓加工角度控制激光模组对待加工物料进行切割,以获得具有目标产品轮廓的产品。本发明通过确定目标产品轮廓中直线轮廓对应的直线轮廓加工角度和圆弧轮廓中圆弧轮廓对应的圆弧轮廓加工角度,根据直线轮廓加工角度和圆弧轮廓加工角度控制激光模组对待加工物料进行切割,能够使激

激光打标设备的打标控制方法、装置和存储介质和设备.pdf
本申请涉及一种激光打标设备的打标控制方法、装置和存储介质和设备,获取待发射激光的打标参数和目标焦距,根据目标焦距输出升降控制信号,目标焦距表征激光打标设备的激光器系统的透镜到待打标工件透明层下料位表面的距离;根据待发射激光的打标参数输出激光打标信号,激光打标信号用于控制激光器系统发射激光脉冲,以使在待打标工件透明层下料位表面打标形成标记。通过控制升降机构调节激光器系统的焦距至目标焦距使光源聚焦至待打标工件透明层下料位表面的距离,激光脉冲输出瞬间在料位表面烧蚀汽化后的化学反应改变颜色形成标记,因标记形成在工