
点云渲染方法、装置、终端及存储介质.pdf

哲妍****彩妍

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
点云渲染方法、装置、终端及存储介质.pdf
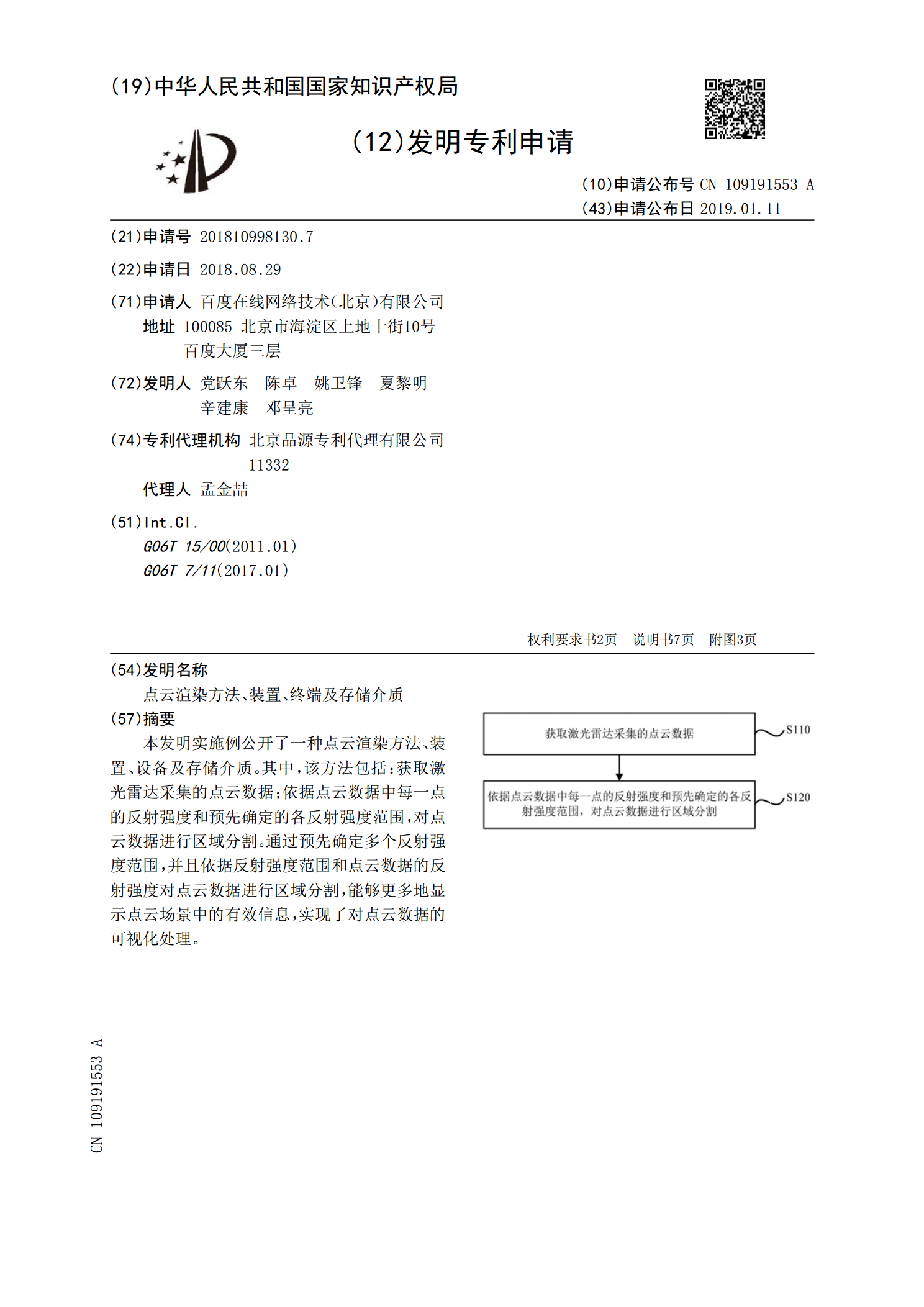
本发明实施例公开了一种点云渲染方法、装置、设备及存储介质。其中,该方法包括:获取激光雷达采集的点云数据;依据点云数据中每一点的反射强度和预先确定的各反射强度范围,对点云数据进行区域分割。通过预先确定多个反射强度范围,并且依据反射强度范围和点云数据的反射强度对点云数据进行区域分割,能够更多地显示点云场景中的有效信息,实现了对点云数据的可视化处理。
云渲染方法、装置、终端设备及可读存储介质.pdf
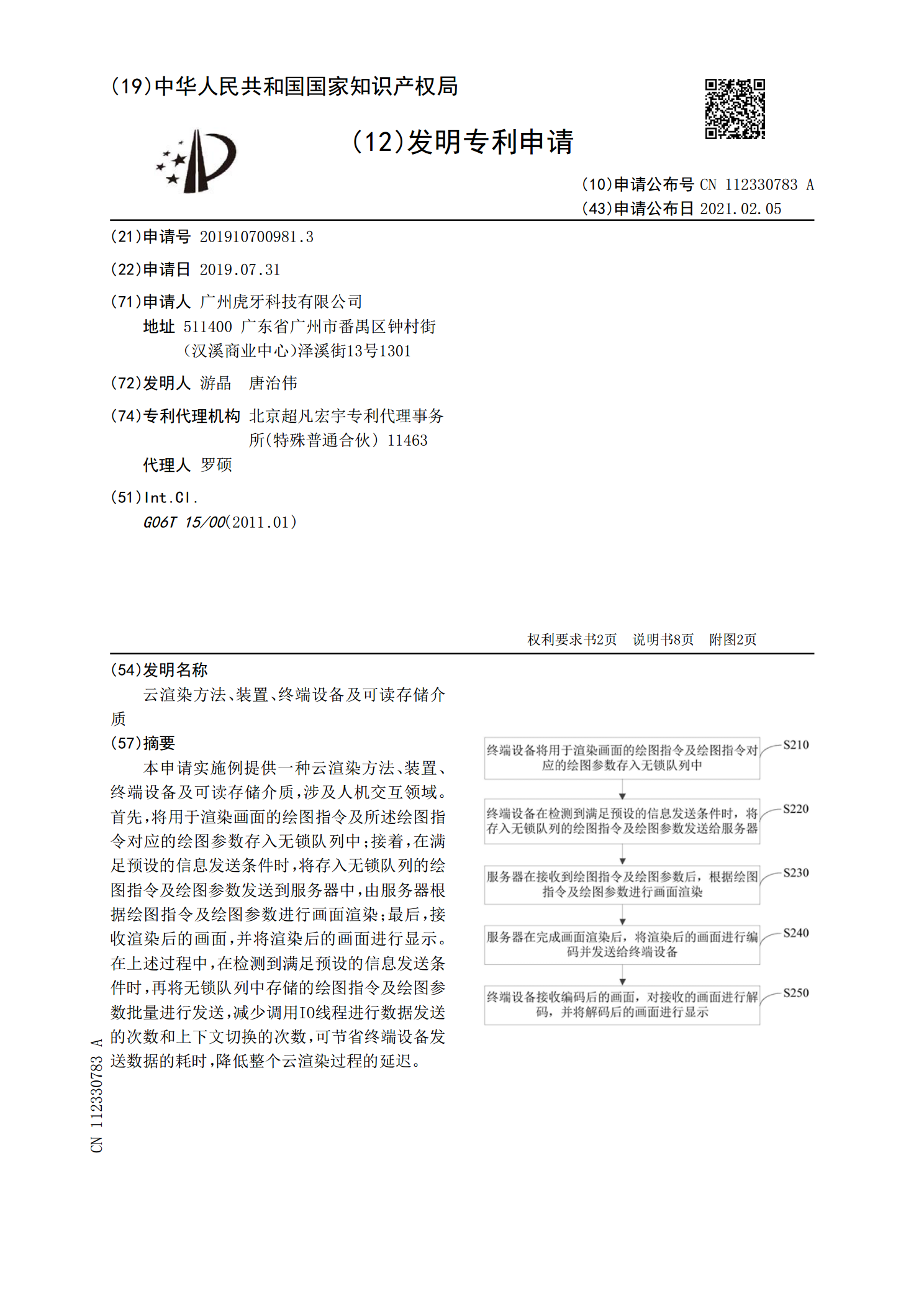
本申请实施例提供一种云渲染方法、装置、终端设备及可读存储介质,涉及人机交互领域。首先,将用于渲染画面的绘图指令及所述绘图指令对应的绘图参数存入无锁队列中;接着,在满足预设的信息发送条件时,将存入无锁队列的绘图指令及绘图参数发送到服务器中,由服务器根据绘图指令及绘图参数进行画面渲染;最后,接收渲染后的画面,并将渲染后的画面进行显示。在上述过程中,在检测到满足预设的信息发送条件时,再将无锁队列中存储的绘图指令及绘图参数批量进行发送,减少调用IO线程进行数据发送的次数和上下文切换的次数,可节省终端设备发送数据的
实时点云数据渲染方法、装置、终端及存储介质.pdf
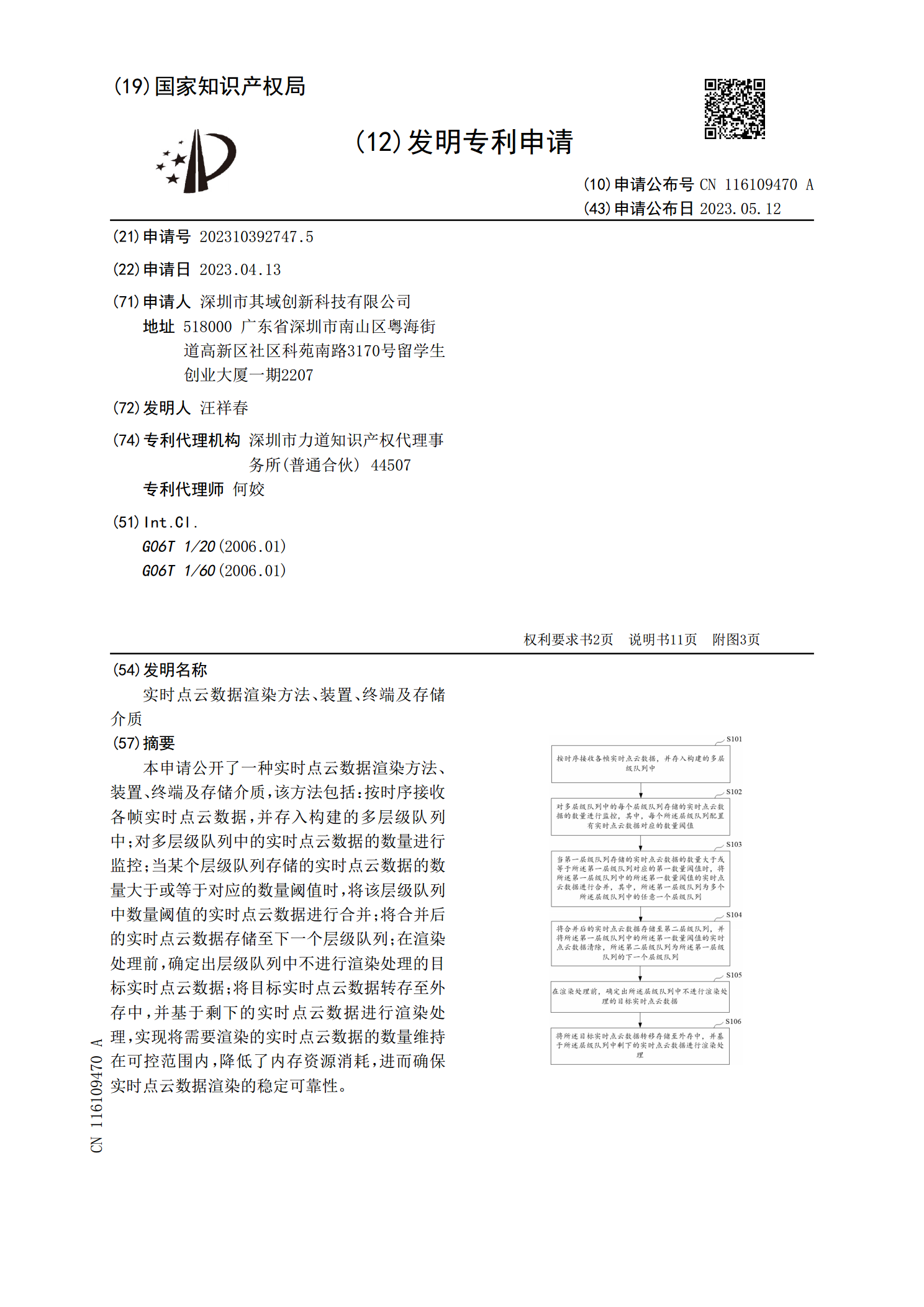
本申请公开了一种实时点云数据渲染方法、装置、终端及存储介质,该方法包括:按时序接收各帧实时点云数据,并存入构建的多层级队列中;对多层级队列中的实时点云数据的数量进行监控;当某个层级队列存储的实时点云数据的数量大于或等于对应的数量阈值时,将该层级队列中数量阈值的实时点云数据进行合并;将合并后的实时点云数据存储至下一个层级队列;在渲染处理前,确定出层级队列中不进行渲染处理的目标实时点云数据;将目标实时点云数据转存至外存中,并基于剩下的实时点云数据进行渲染处理,实现将需要渲染的实时点云数据的数量维持在可控范围内
点云数据渲染方法、装置、设备及存储介质.pdf
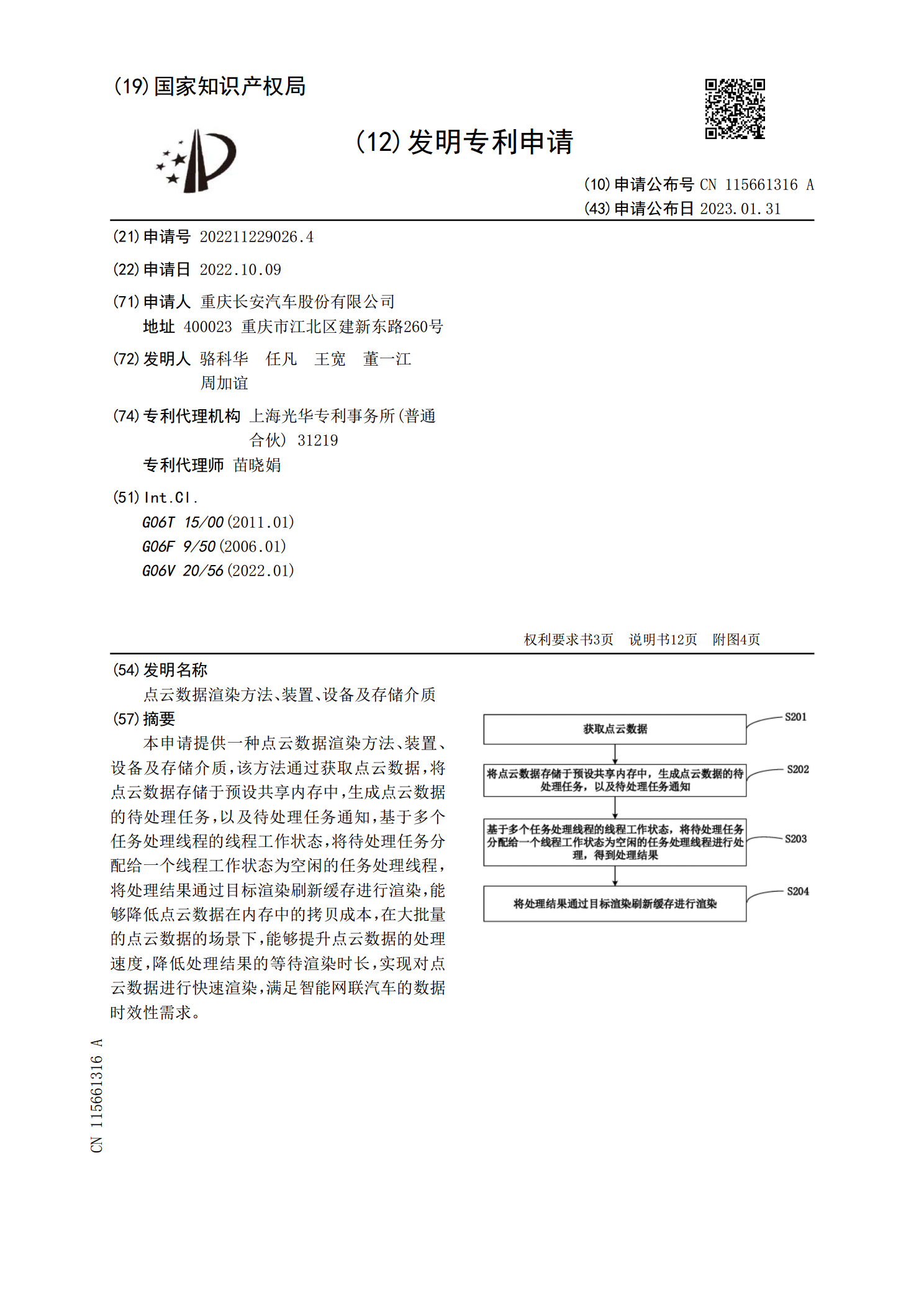
本申请提供一种点云数据渲染方法、装置、设备及存储介质,该方法通过获取点云数据,将点云数据存储于预设共享内存中,生成点云数据的待处理任务,以及待处理任务通知,基于多个任务处理线程的线程工作状态,将待处理任务分配给一个线程工作状态为空闲的任务处理线程,将处理结果通过目标渲染刷新缓存进行渲染,能够降低点云数据在内存中的拷贝成本,在大批量的点云数据的场景下,能够提升点云数据的处理速度,降低处理结果的等待渲染时长,实现对点云数据进行快速渲染,满足智能网联汽车的数据时效性需求。
点云数据渲染方法、装置、设备及存储介质.pdf
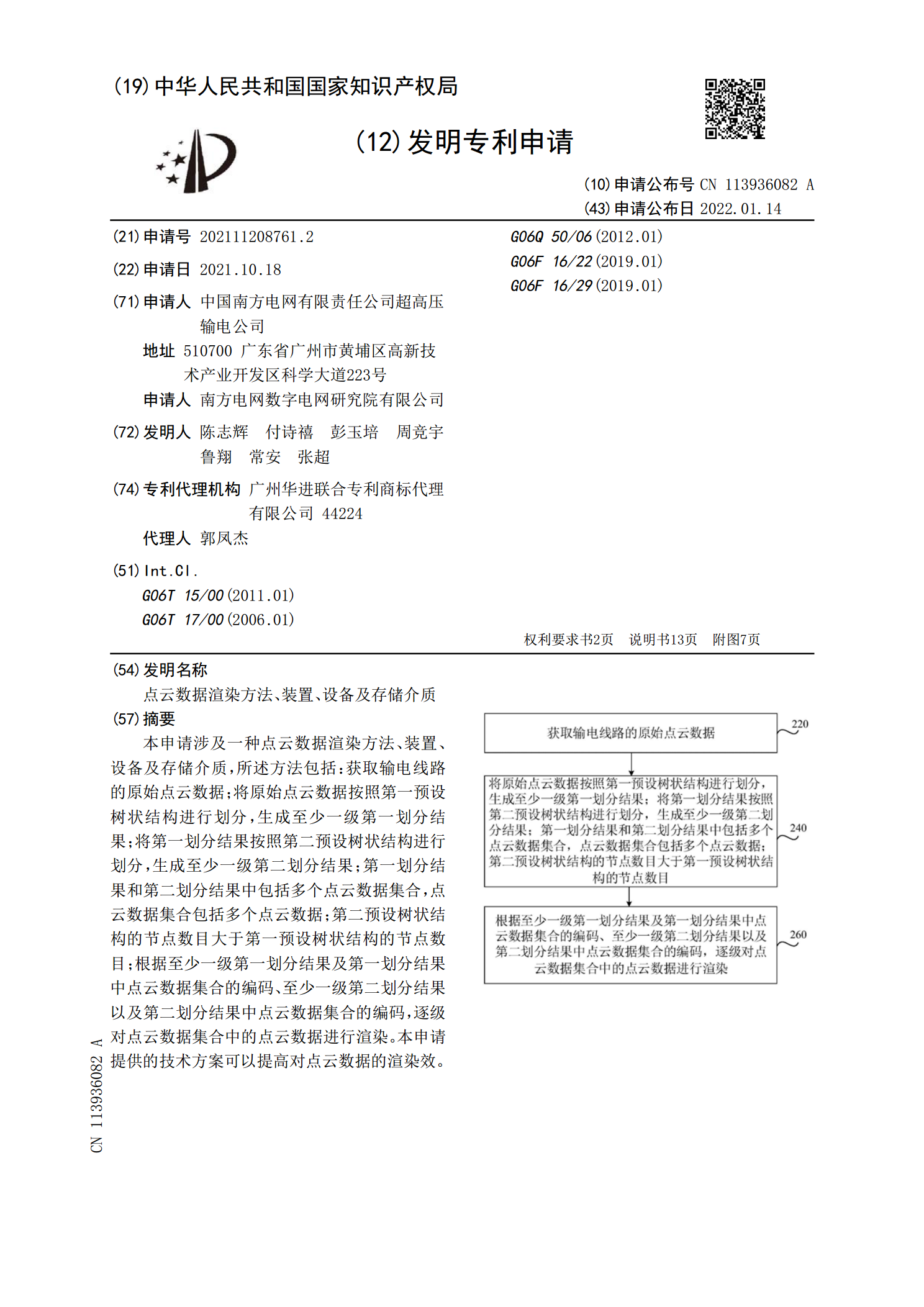
本申请涉及一种点云数据渲染方法、装置、设备及存储介质,所述方法包括:获取输电线路的原始点云数据;将原始点云数据按照第一预设树状结构进行划分,生成至少一级第一划分结果;将第一划分结果按照第二预设树状结构进行划分,生成至少一级第二划分结果;第一划分结果和第二划分结果中包括多个点云数据集合,点云数据集合包括多个点云数据;第二预设树状结构的节点数目大于第一预设树状结构的节点数目;根据至少一级第一划分结果及第一划分结果中点云数据集合的编码、至少一级第二划分结果以及第二划分结果中点云数据集合的编码,逐级对点云数据集合