
一种车辆行驶轨迹的渲染方法、装置、设备及存储介质.pdf

康平****ng

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆行驶轨迹的渲染方法、装置、设备及存储介质.pdf
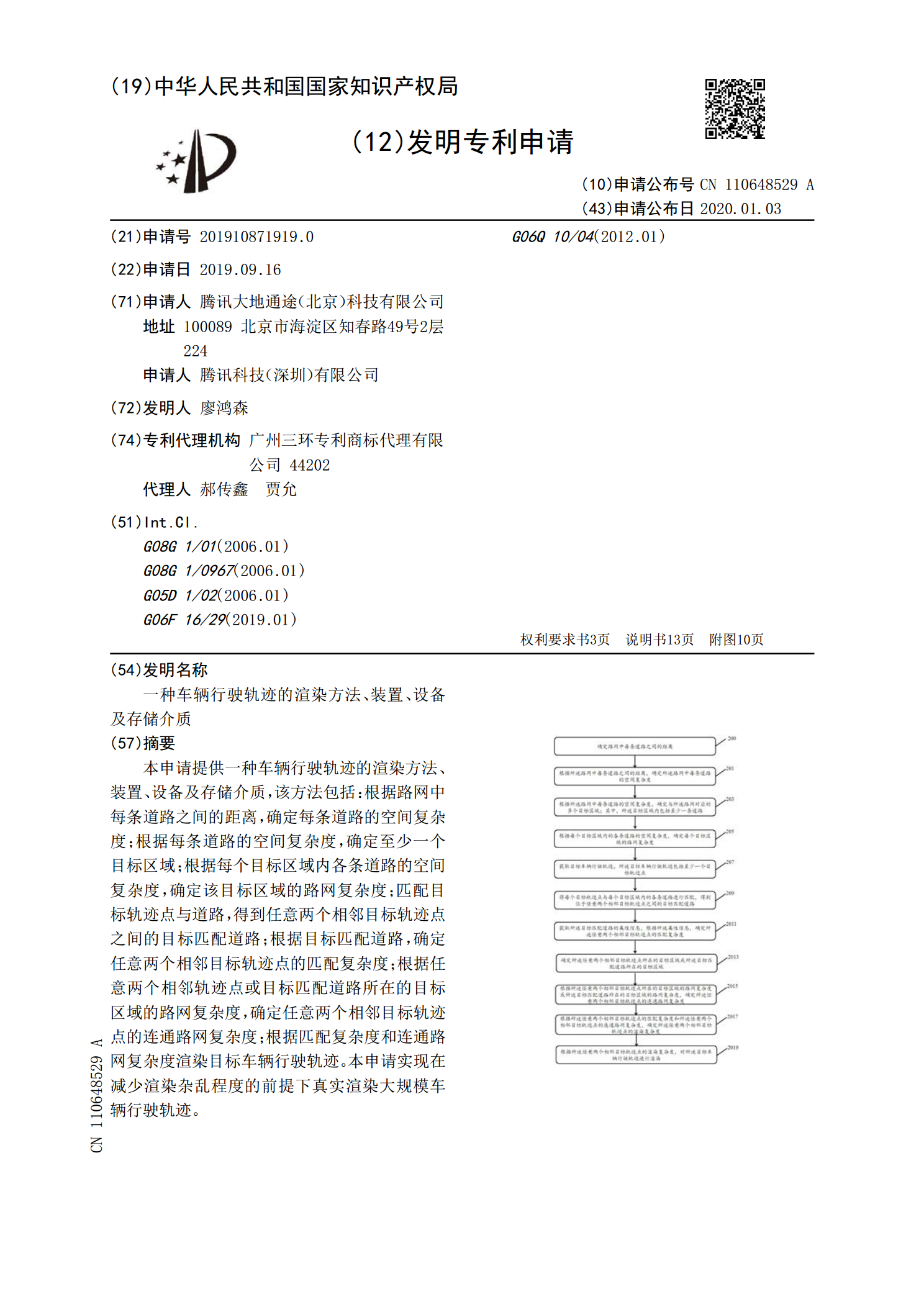
本申请提供一种车辆行驶轨迹的渲染方法、装置、设备及存储介质,该方法包括:根据路网中每条道路之间的距离,确定每条道路的空间复杂度;根据每条道路的空间复杂度,确定至少一个目标区域;根据每个目标区域内各条道路的空间复杂度,确定该目标区域的路网复杂度;匹配目标轨迹点与道路,得到任意两个相邻目标轨迹点之间的目标匹配道路;根据目标匹配道路,确定任意两个相邻目标轨迹点的匹配复杂度;根据任意两个相邻轨迹点或目标匹配道路所在的目标区域的路网复杂度,确定任意两个相邻目标轨迹点的连通路网复杂度;根据匹配复杂度和连通路网复杂度渲
一种行驶轨迹应用方法、装置、设备、存储介质及车辆.pdf
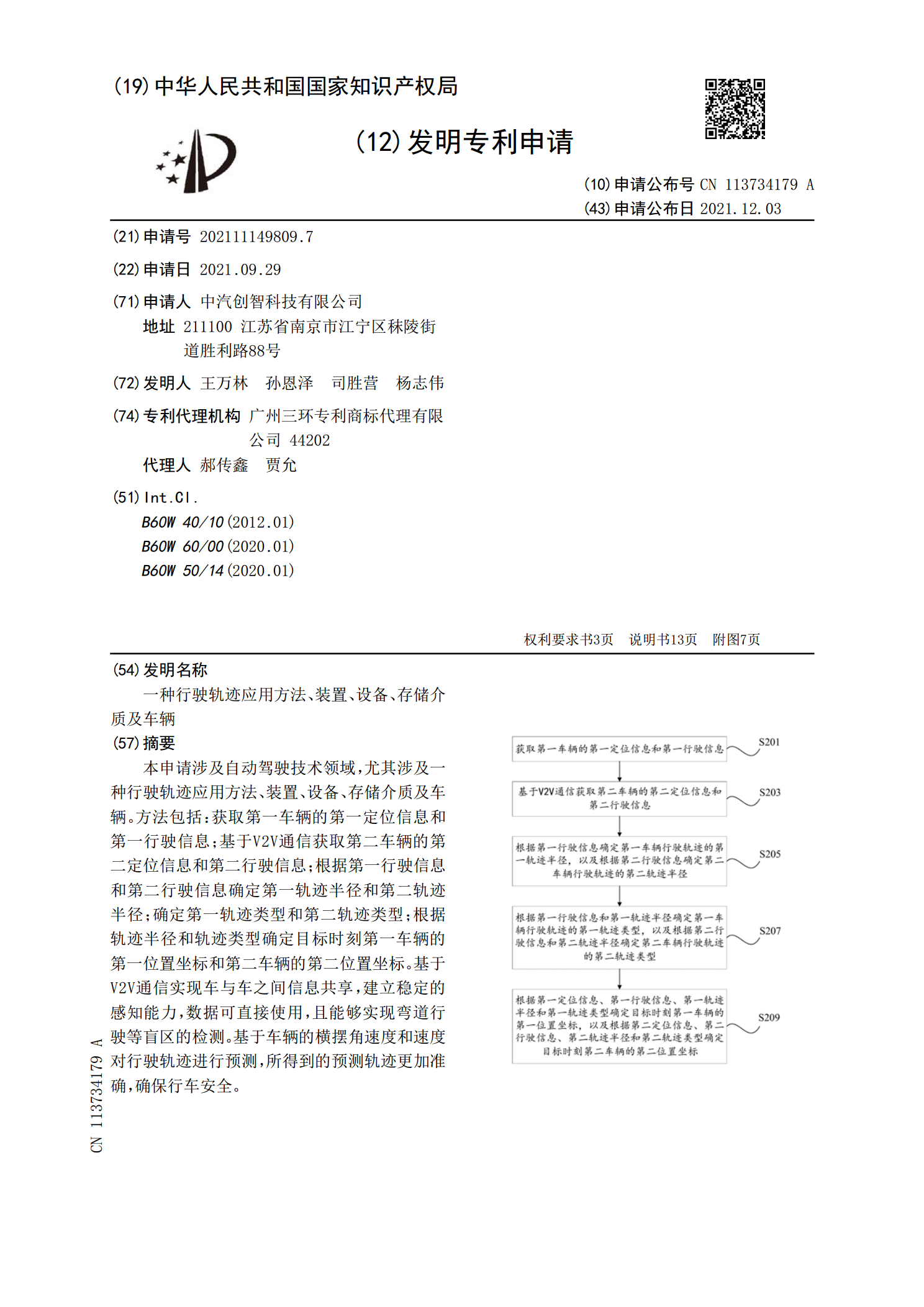
本申请涉及自动驾驶技术领域,尤其涉及一种行驶轨迹应用方法、装置、设备、存储介质及车辆。方法包括:获取第一车辆的第一定位信息和第一行驶信息;基于V2V通信获取第二车辆的第二定位信息和第二行驶信息;根据第一行驶信息和第二行驶信息确定第一轨迹半径和第二轨迹半径;确定第一轨迹类型和第二轨迹类型;根据轨迹半径和轨迹类型确定目标时刻第一车辆的第一位置坐标和第二车辆的第二位置坐标。基于V2V通信实现车与车之间信息共享,建立稳定的感知能力,数据可直接使用,且能够实现弯道行驶等盲区的检测。基于车辆的横摆角速度和速度对行驶轨
车辆行驶轨迹分享方法和装置、设备及存储介质.pdf
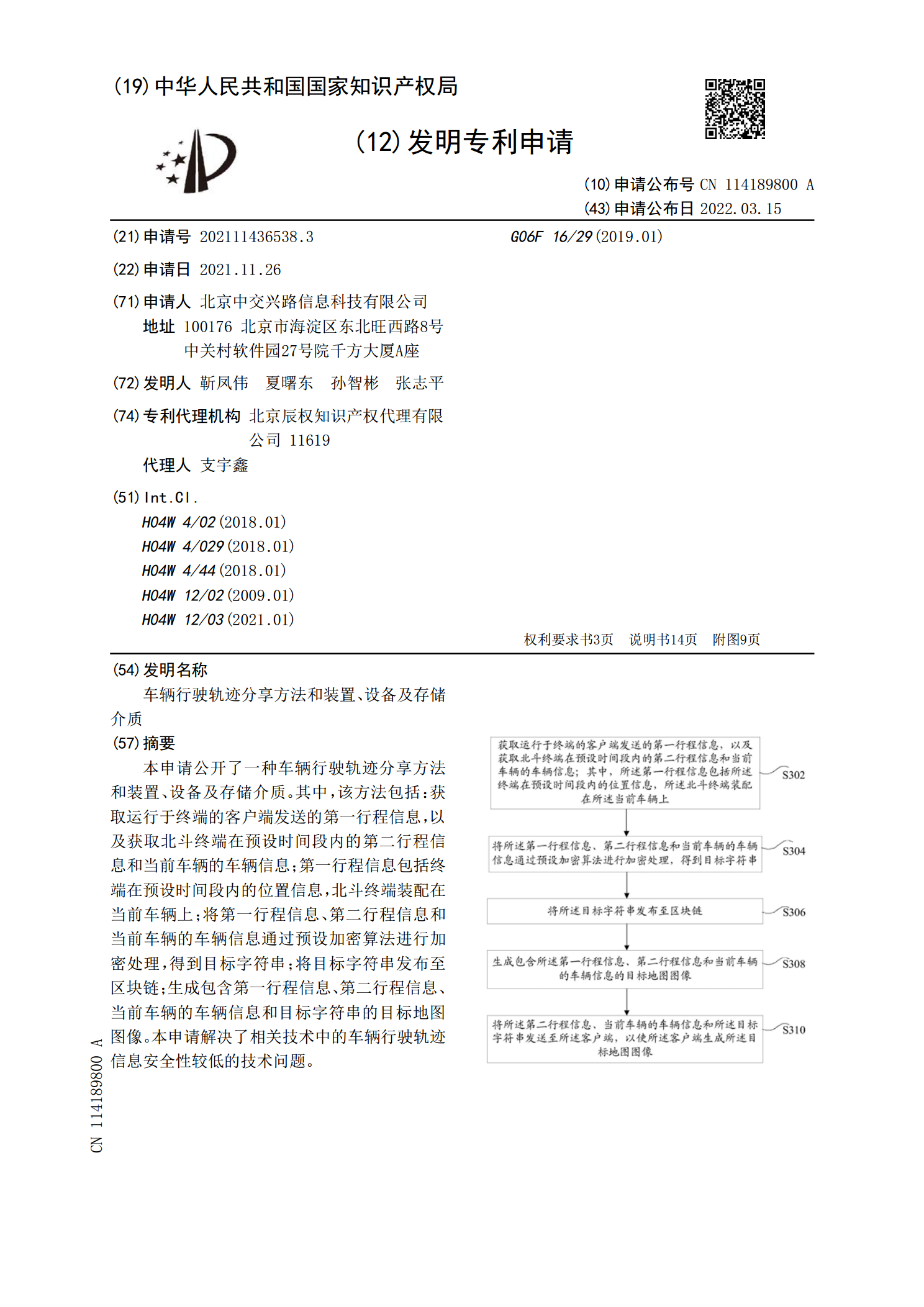
本申请公开了一种车辆行驶轨迹分享方法和装置、设备及存储介质。其中,该方法包括:获取运行于终端的客户端发送的第一行程信息,以及获取北斗终端在预设时间段内的第二行程信息和当前车辆的车辆信息;第一行程信息包括终端在预设时间段内的位置信息,北斗终端装配在当前车辆上;将第一行程信息、第二行程信息和当前车辆的车辆信息通过预设加密算法进行加密处理,得到目标字符串;将目标字符串发布至区块链;生成包含第一行程信息、第二行程信息、当前车辆的车辆信息和目标字符串的目标地图图像。本申请解决了相关技术中的车辆行驶轨迹信息安全性较低
轨迹渲染方法、装置、电子设备及存储介质.pdf
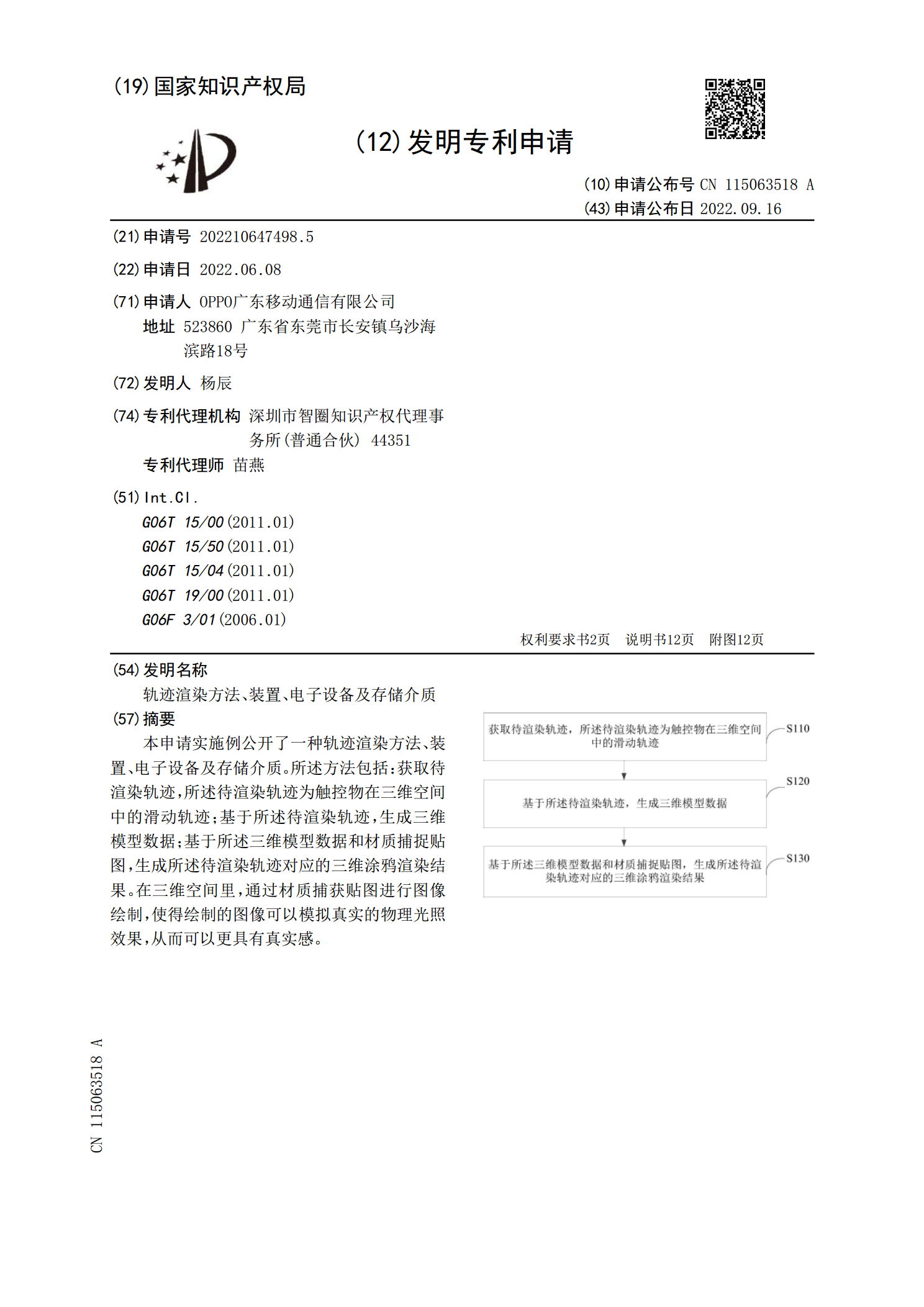
本申请实施例公开了一种轨迹渲染方法、装置、电子设备及存储介质。所述方法包括:获取待渲染轨迹,所述待渲染轨迹为触控物在三维空间中的滑动轨迹;基于所述待渲染轨迹,生成三维模型数据;基于所述三维模型数据和材质捕捉贴图,生成所述待渲染轨迹对应的三维涂鸦渲染结果。在三维空间里,通过材质捕获贴图进行图像绘制,使得绘制的图像可以模拟真实的物理光照效果,从而可以更具有真实感。
车辆行驶提醒方法、装置、设备及存储介质.pdf
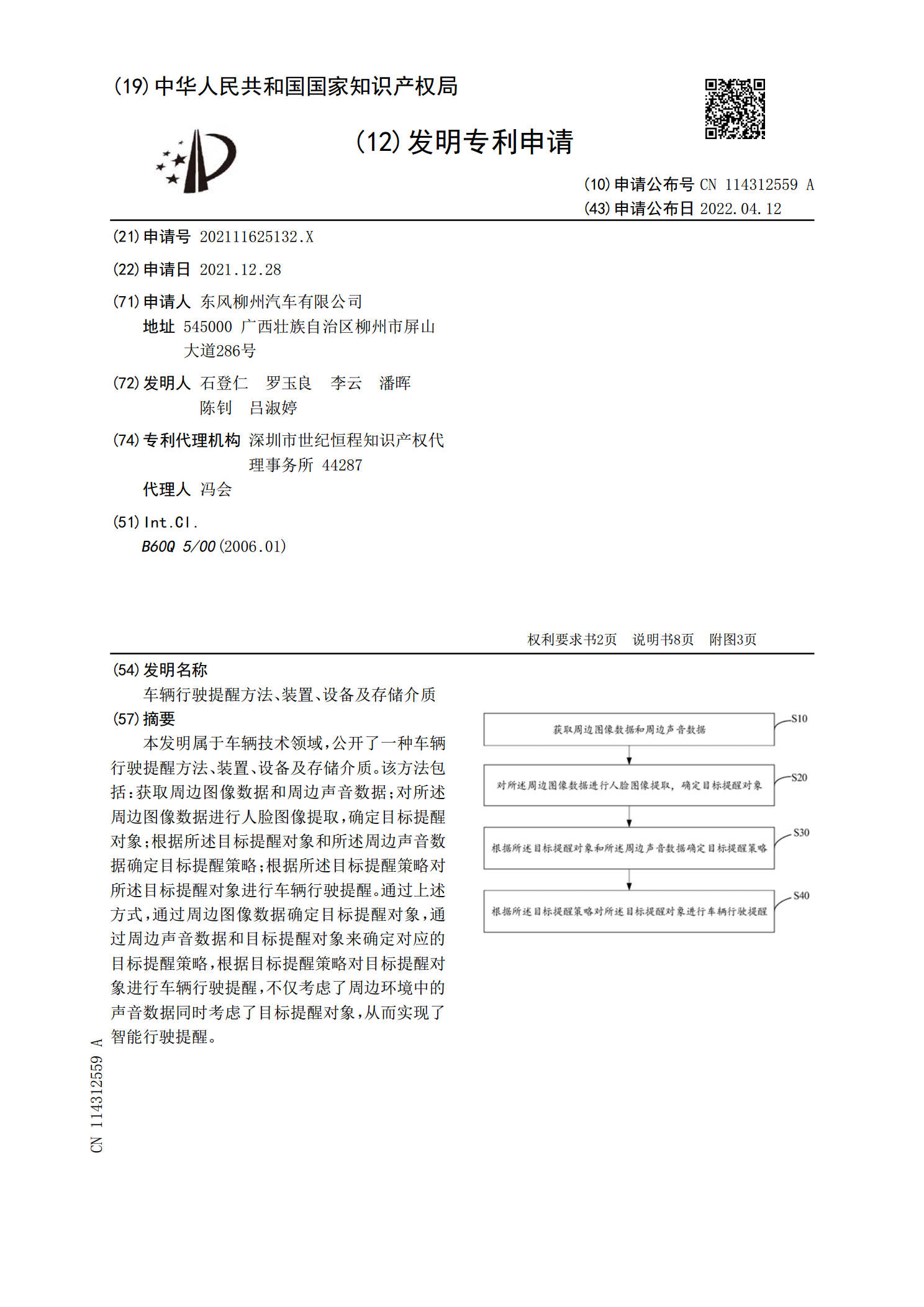
本发明属于车辆技术领域,公开了一种车辆行驶提醒方法、装置、设备及存储介质。该方法包括:获取周边图像数据和周边声音数据;对所述周边图像数据进行人脸图像提取,确定目标提醒对象;根据所述目标提醒对象和所述周边声音数据确定目标提醒策略;根据所述目标提醒策略对所述目标提醒对象进行车辆行驶提醒。通过上述方式,通过周边图像数据确定目标提醒对象,通过周边声音数据和目标提醒对象来确定对应的目标提醒策略,根据目标提醒策略对目标提醒对象进行车辆行驶提醒,不仅考虑了周边环境中的声音数据同时考虑了目标提醒对象,从而实现了智能行驶提