
机械臂模型位姿计算方法、装置、电子设备和存储介质.pdf

白凡****12


1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机械臂模型位姿计算方法、装置、电子设备和存储介质.pdf
本申请涉及一种机械臂模型位姿计算方法、装置、电子设备和存储介质,其中,该方法包括:获取机械臂的末端TCP位姿;基于所述末端TCP位姿、机械臂的理论DH参数和标定DH参数,确定机械臂模型的位姿。通过本申请,在保证机械臂末端法兰位姿与真实机械臂一致的同时,机械臂中间各连杆不发生位置偏移,使机械臂模型在路径规划的碰撞检测和场景的3D渲染中更加准确。

位姿计算方法和装置、电子设备、可读存储介质.pdf
本申请涉及一种位姿计算方法和装置、电子设备、计算机可读存储介质,若在预设初始化滑窗内首次采集到当前环境的深度图像,则将采集深度图像时电子设备的位姿确定为初始位姿;其中,深度图像对应的目标RGB图像并非预设初始化滑窗内的最后一帧图像。根据初始位姿、目标RGB图像、深度图像及目标RGB图像的下一帧RGB图像,确定电子设备采集下一帧RGB图像时的位姿。因此,采用本申请中的位姿计算方法,不需要在预设初始化滑窗内采集满RGB图像,电子设备才能够输出采集预设初始化滑窗外的第一帧RGB图像时的位姿。而在预设初始化滑窗内
位姿确定方法、装置、电子设备及存储介质.pdf
本申请公开了一种位姿确定方法、装置、电子设备及存储介质,应用于包括第一相机以及第二相机的电子设备,第一相机以第一频率采集彩色图像,第二相机以小于第一频率的第二频率采集深度图像。该位姿确定方法包括:根据获取到的多帧彩色图像,获取多帧彩色图像中二维特征点所对应的三维空间点作为待修正空间点;根据获取到的深度图像,获取目标彩色图像中二维特征点所对应的三维空间点作为参考空间点,其中目标彩色图像为多帧彩色图像中与深度图像相匹配的彩色图像;根据参考空间点,对待修正空间点进行修正处理,得到修正后的目标空间点;根据目标空间
基于机械臂的存样方法、装置、电子设备和存储介质.pdf
本申请属于存样领域,尤其涉及基于机械臂的存样方法、装置、电子设备和存储介质。该方法包括:基于管架位置和第一机械臂所在的位置,控制第一机械臂将目标拭子移动至管架位置;控制第一机械臂将目标拭子的拭子头移入采样管的保存液内,并控制第一机械臂转动预设次数;控制第二机械臂以预设的第一按压次数按压采样管的管壁;控制第一机械臂移动至指定的位置,已完成当次存样。即本申请通过控制第一机械臂将目标拭子的拭子头移入采样管的保存液内,并控制第一机械臂转动预设次数;控制第二机械臂以预设的第一按压次数按压采样管的管壁;控制第一机械臂
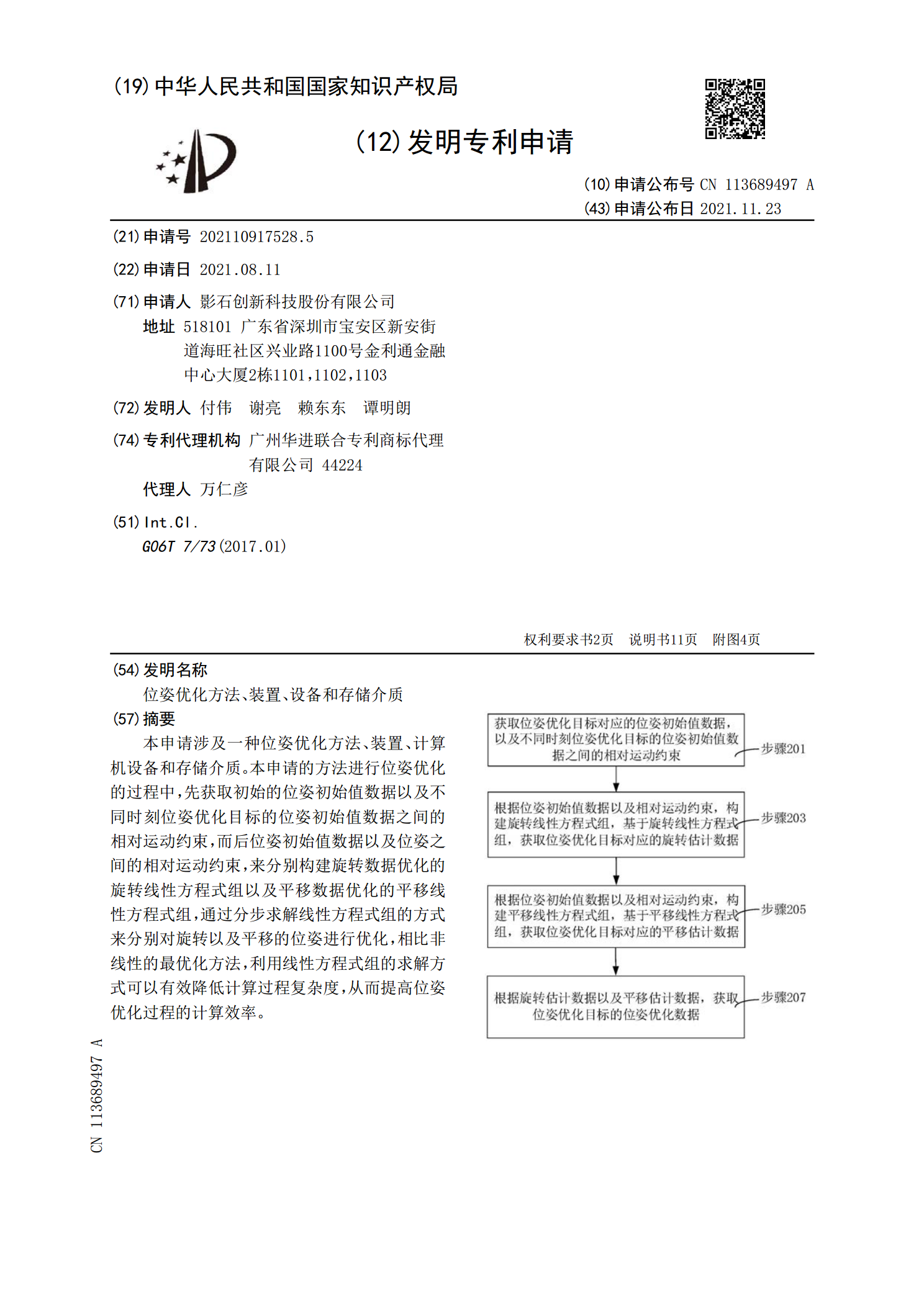
位姿优化方法、装置、设备和存储介质.pdf
本申请涉及一种位姿优化方法、装置、计算机设备和存储介质。本申请的方法进行位姿优化的过程中,先获取初始的位姿初始值数据以及不同时刻位姿优化目标的位姿初始值数据之间的相对运动约束,而后位姿初始值数据以及位姿之间的相对运动约束,来分别构建旋转数据优化的旋转线性方程式组以及平移数据优化的平移线性方程式组,通过分步求解线性方程式组的方式来分别对旋转以及平移的位姿进行优化,相比非线性的最优化方法,利用线性方程式组的求解方式可以有效降低计算过程复杂度,从而提高位姿优化过程的计算效率。