
位姿优化方法、装置、设备和存储介质.pdf

思洁****爱吗

1/10
2/10

3/10

4/10
5/10

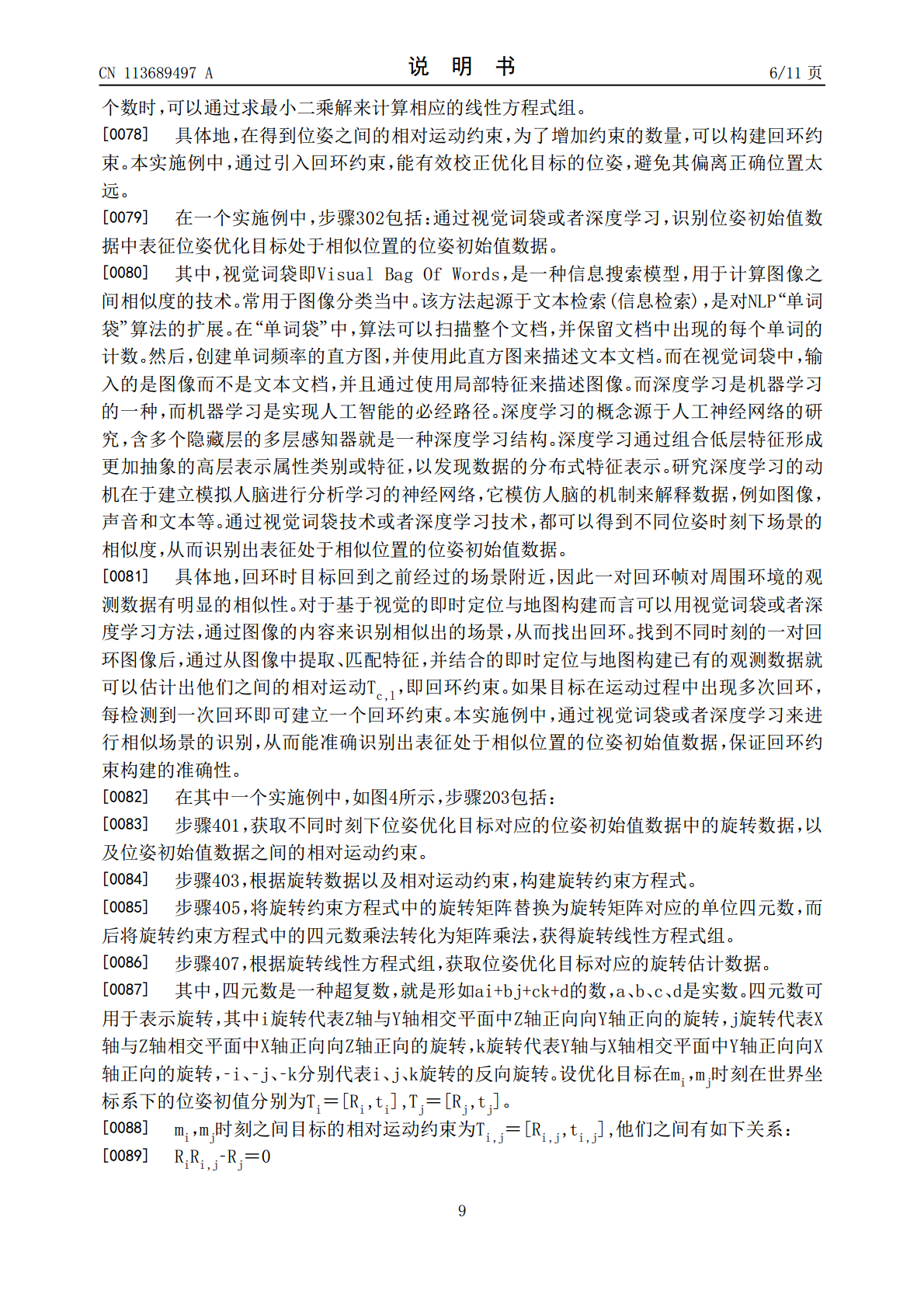
6/10

7/10
8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
位姿优化方法、装置、设备和存储介质.pdf
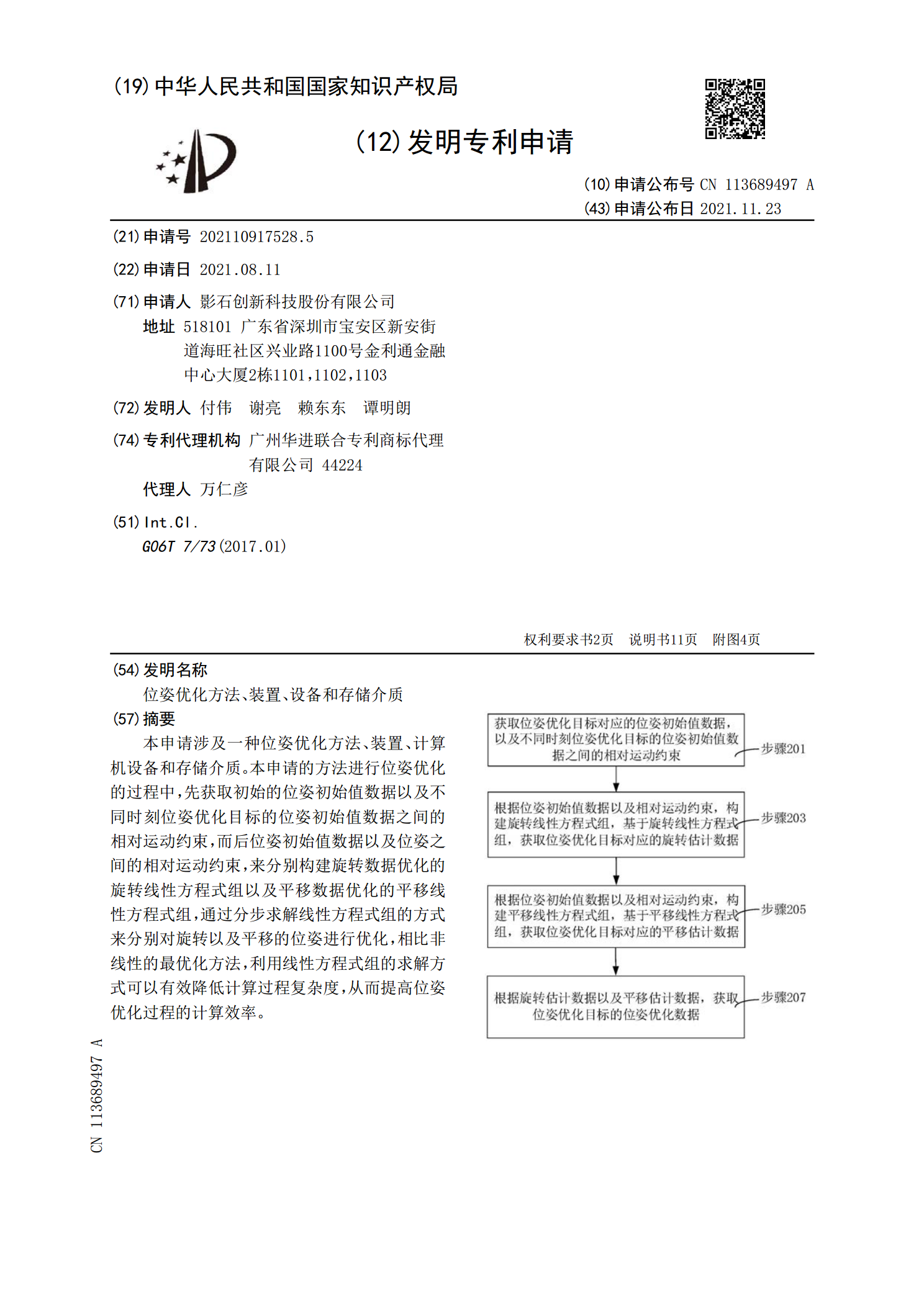
本申请涉及一种位姿优化方法、装置、计算机设备和存储介质。本申请的方法进行位姿优化的过程中,先获取初始的位姿初始值数据以及不同时刻位姿优化目标的位姿初始值数据之间的相对运动约束,而后位姿初始值数据以及位姿之间的相对运动约束,来分别构建旋转数据优化的旋转线性方程式组以及平移数据优化的平移线性方程式组,通过分步求解线性方程式组的方式来分别对旋转以及平移的位姿进行优化,相比非线性的最优化方法,利用线性方程式组的求解方式可以有效降低计算过程复杂度,从而提高位姿优化过程的计算效率。
位姿校正方法、装置、设备和存储介质.pdf
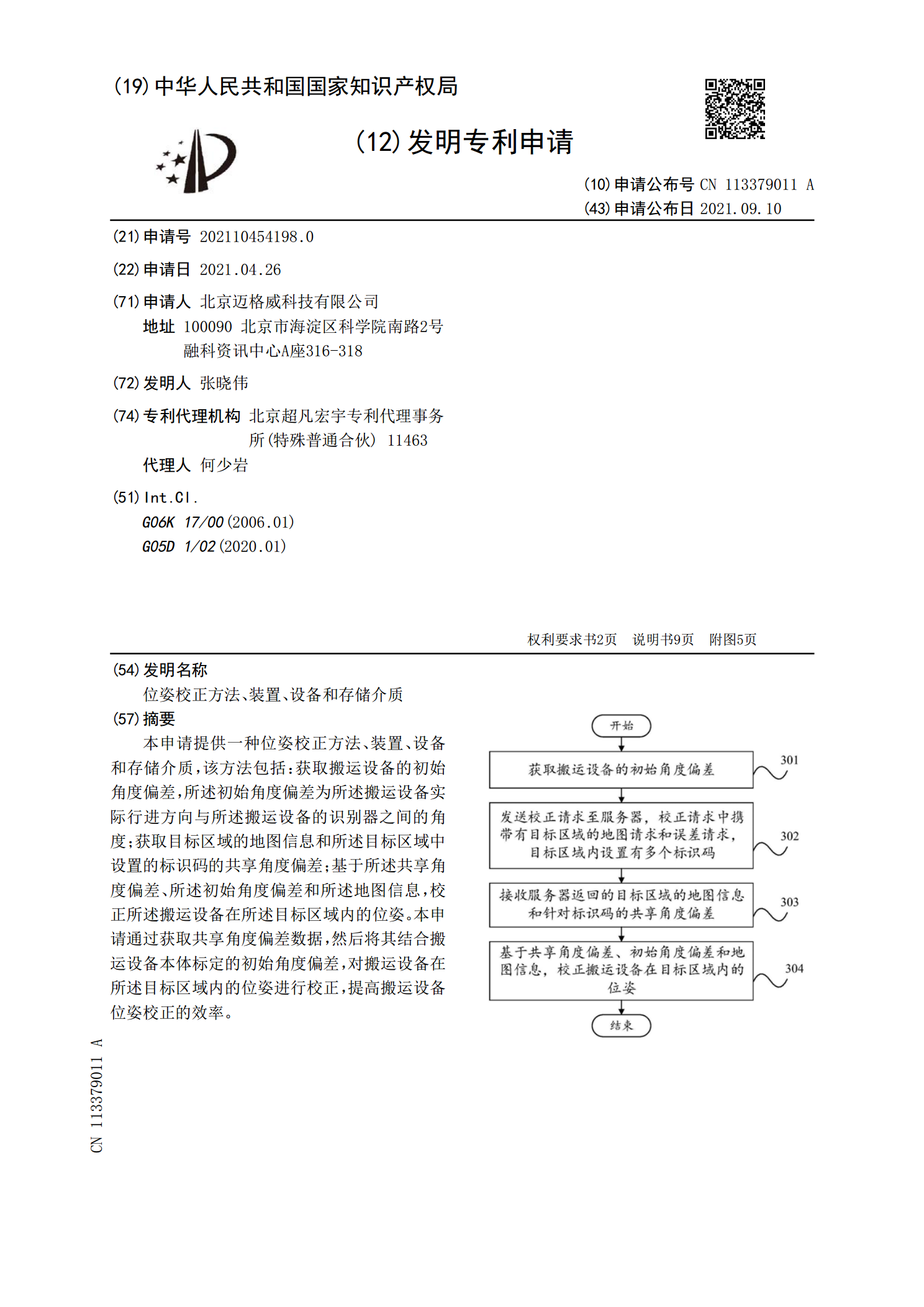
本申请提供一种位姿校正方法、装置、设备和存储介质,该方法包括:获取搬运设备的初始角度偏差,所述初始角度偏差为所述搬运设备实际行进方向与所述搬运设备的识别器之间的角度;获取目标区域的地图信息和所述目标区域中设置的标识码的共享角度偏差;基于所述共享角度偏差、所述初始角度偏差和所述地图信息,校正所述搬运设备在所述目标区域内的位姿。本申请通过获取共享角度偏差数据,然后将其结合搬运设备本体标定的初始角度偏差,对搬运设备在所述目标区域内的位姿进行校正,提高搬运设备位姿校正的效率。
位姿获取方法、装置、设备及存储介质.pdf
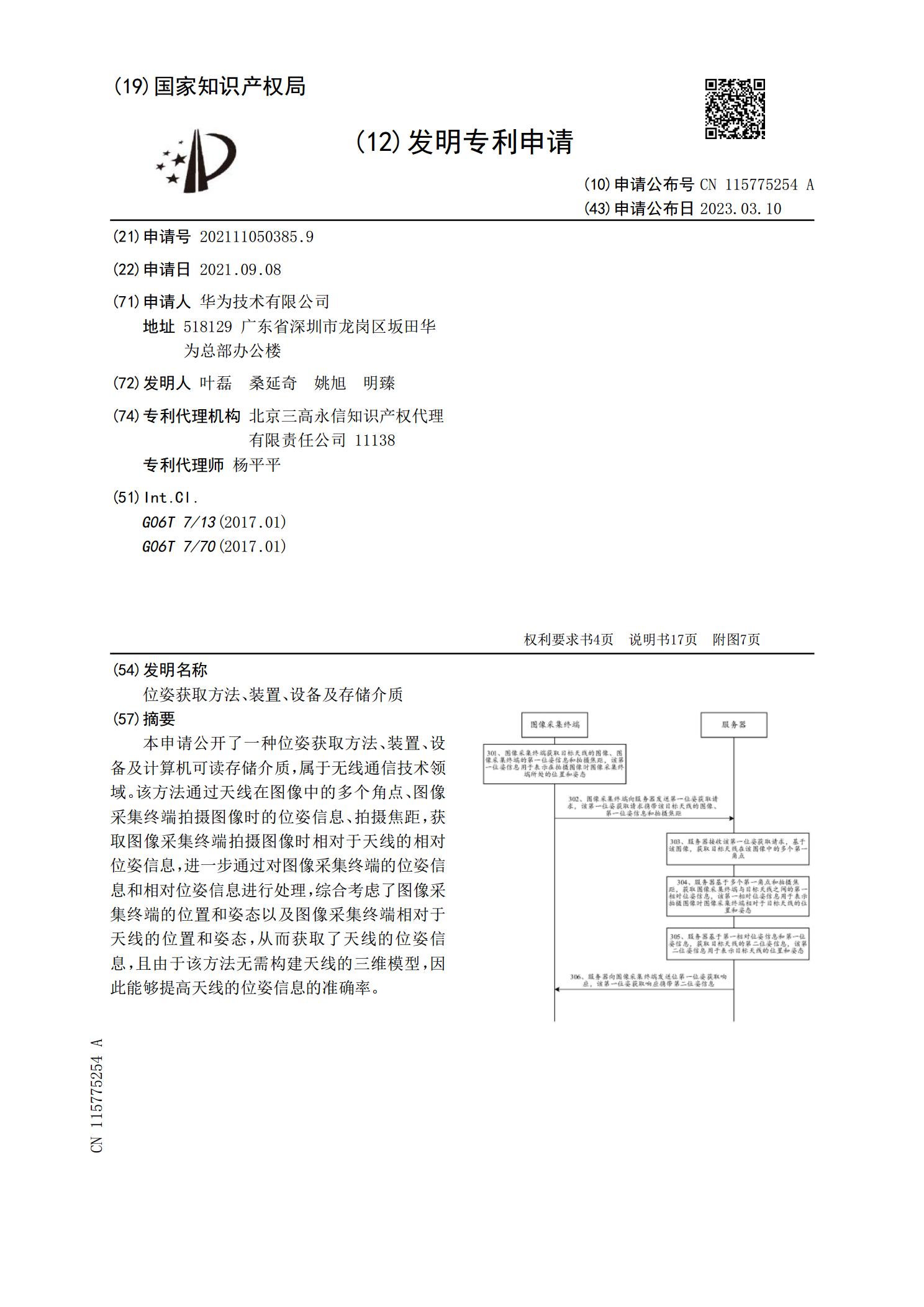
本申请公开了一种位姿获取方法、装置、设备及计算机可读存储介质,属于无线通信技术领域。该方法通过天线在图像中的多个角点、图像采集终端拍摄图像时的位姿信息、拍摄焦距,获取图像采集终端拍摄图像时相对于天线的相对位姿信息,进一步通过对图像采集终端的位姿信息和相对位姿信息进行处理,综合考虑了图像采集终端的位置和姿态以及图像采集终端相对于天线的位置和姿态,从而获取了天线的位姿信息,且由于该方法无需构建天线的三维模型,因此能够提高天线的位姿信息的准确率。

位姿信息的处理方法、装置、设备及存储介质.pdf
本发明提供一种位姿信息的处理方法、装置、设备及存储介质。通过获取光学定位设备发送的待定位设备的光学定位数据,以及电磁收发器发送的待定位设备的电磁定位数据,根据光学定位数据和电磁定位数据的数据稳定性等级,对光学定位数据和电磁定位数据进行数据融合,得到待定位设备的位置信息。通过上述数据处理过程,可以避免光线遮挡或者电磁干扰对定位数据的影响,得到较为稳定的待定位设备的定位数据。
物体抓取位姿的检测方法、装置、设备及存储介质.pdf
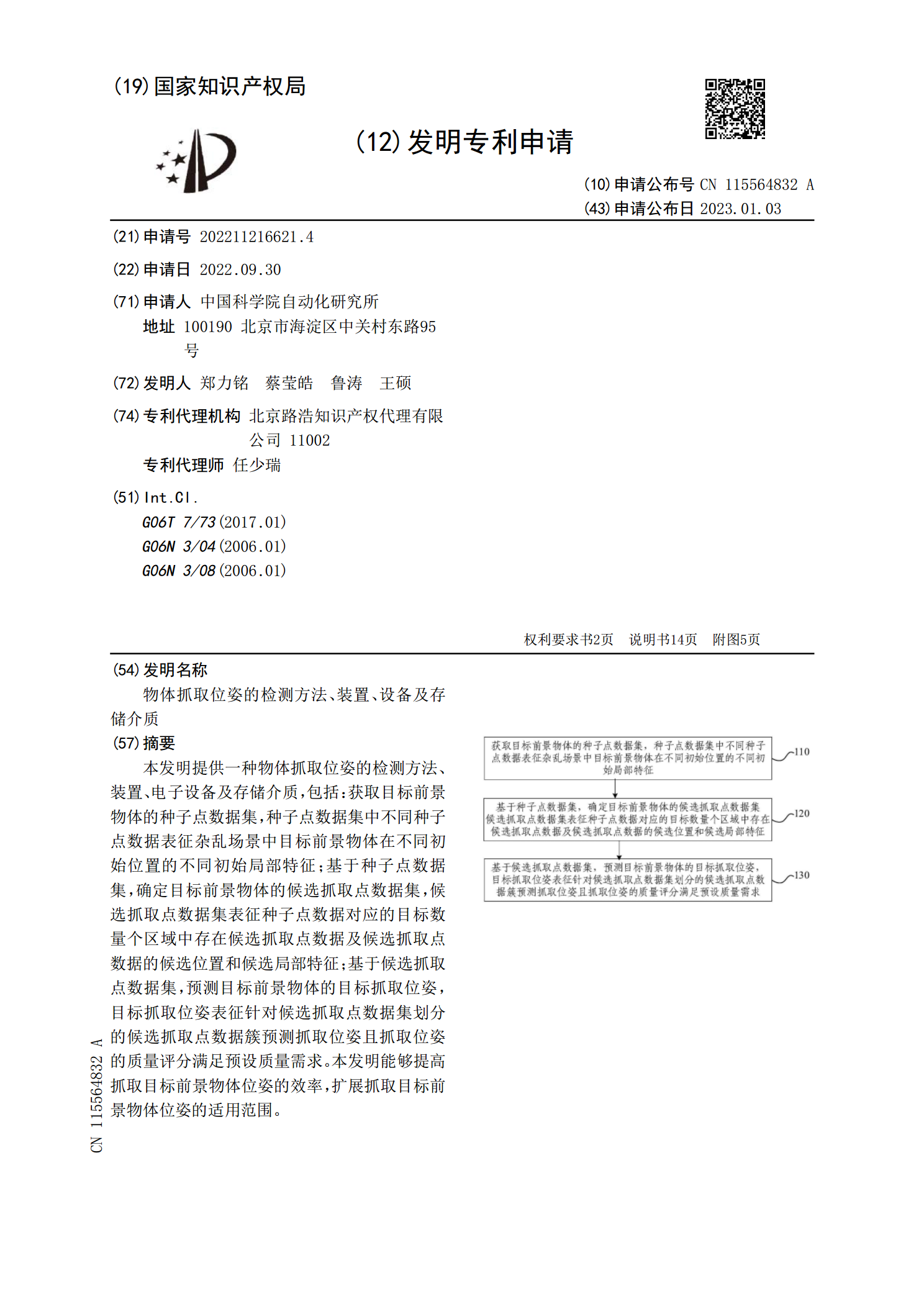
本发明提供一种物体抓取位姿的检测方法、装置、电子设备及存储介质,包括:获取目标前景物体的种子点数据集,种子点数据集中不同种子点数据表征杂乱场景中目标前景物体在不同初始位置的不同初始局部特征;基于种子点数据集,确定目标前景物体的候选抓取点数据集,候选抓取点数据集表征种子点数据对应的目标数量个区域中存在候选抓取点数据及候选抓取点数据的候选位置和候选局部特征;基于候选抓取点数据集,预测目标前景物体的目标抓取位姿,目标抓取位姿表征针对候选抓取点数据集划分的候选抓取点数据簇预测抓取位姿且抓取位姿的质量评分满足预设质