
基于机械臂的存样方法、装置、电子设备和存储介质.pdf

书生****ma

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于机械臂的存样方法、装置、电子设备和存储介质.pdf
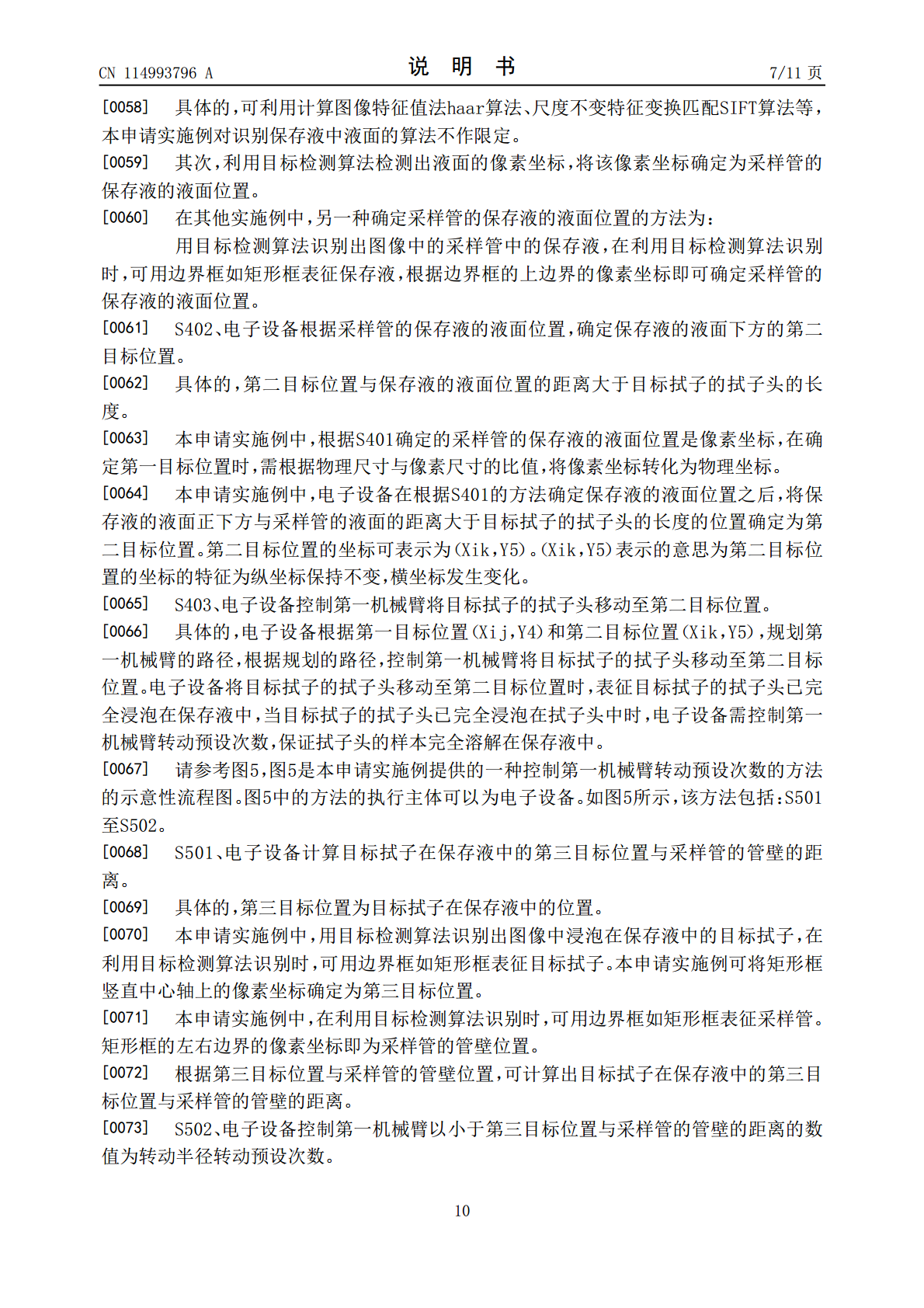
本申请属于存样领域,尤其涉及基于机械臂的存样方法、装置、电子设备和存储介质。该方法包括:基于管架位置和第一机械臂所在的位置,控制第一机械臂将目标拭子移动至管架位置;控制第一机械臂将目标拭子的拭子头移入采样管的保存液内,并控制第一机械臂转动预设次数;控制第二机械臂以预设的第一按压次数按压采样管的管壁;控制第一机械臂移动至指定的位置,已完成当次存样。即本申请通过控制第一机械臂将目标拭子的拭子头移入采样管的保存液内,并控制第一机械臂转动预设次数;控制第二机械臂以预设的第一按压次数按压采样管的管壁;控制第一机械臂
机械臂运动控制方法、装置、存储介质及电子设备.pdf
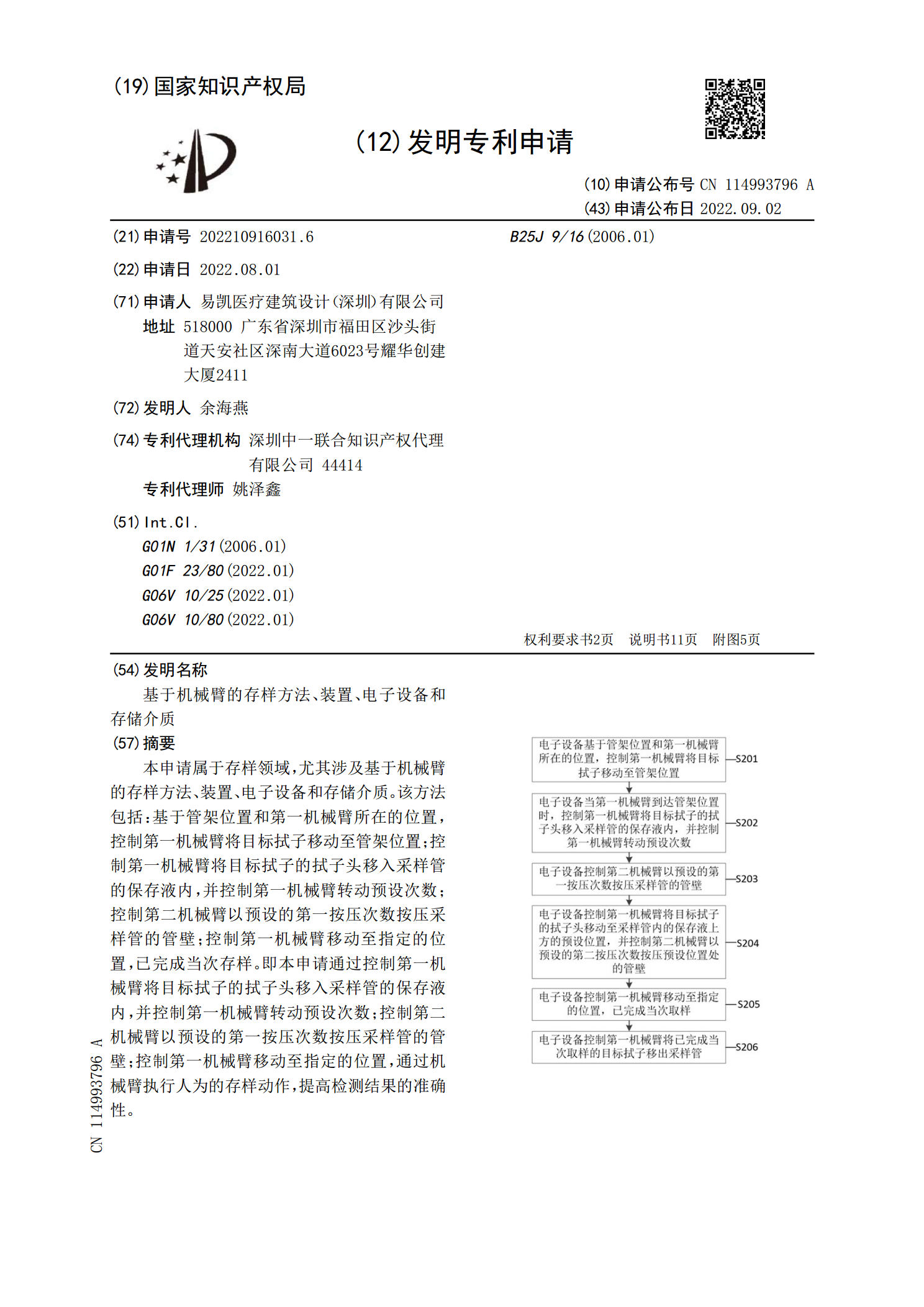
本申请涉及一种机械臂运动控制方法、装置、存储介质及电子设备。所述方法包括:获取机械臂至少两个控制器在目标自由度上的空间插补量,该空间插补量为笛卡尔空间插补量或者关节空间插补量;根据所述空间插补量和预设模型,确定融合插补量;基于所述融合插补量和所述机械臂在所述目标自由度上的当前位姿,确定目标位姿;根据所述目标位姿控制所述机械臂在所述目标自由度上的运动。本申请能够简化对机械臂的运动数据设置,提升机械臂面对复杂工作场景的应对能力。
机械臂控制方法、装置、电子设备及可读存储介质.pdf
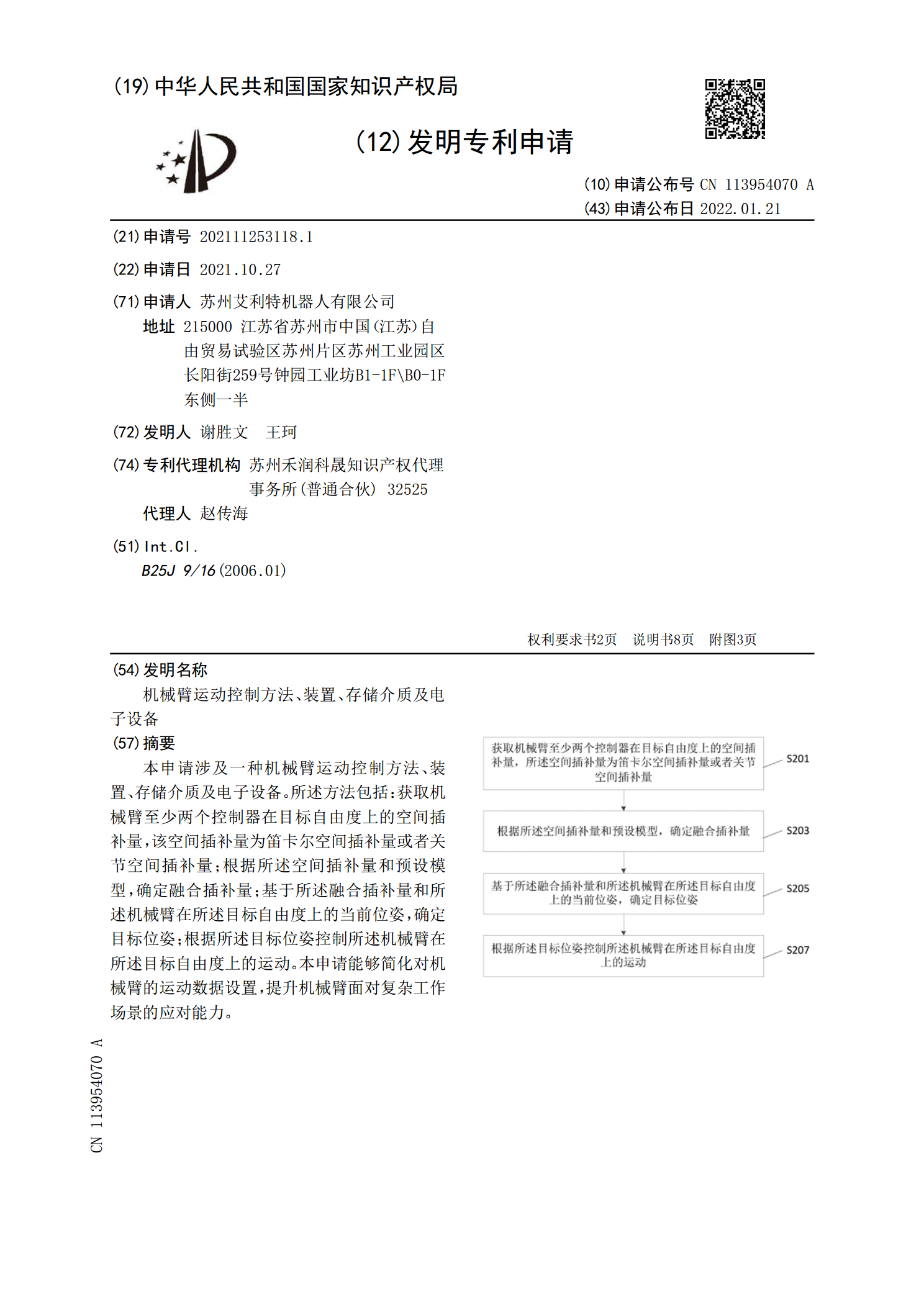
本申请公开了一种机械臂控制方法、装置、电子设备及可读存储介质,应用于运输技术领域,机械臂控制方法包括:获取路径规划信息、物体信息和当前物体位置,控制机械臂以路径规划信息进行运动,物体信息至少包括物体大小信息、物体形状信息以及物体材质信息中的一种;当检测到机械臂运动至物体抓取位置时,根据物体信息、当前物体位置和物体抓取位置,确定机械臂的机械臂关节角度信息;控制机械臂以抓取控制信息抓取待抓取物体,通过机械臂以路径规划信息带动待抓取物体,采集待抓取物体的位置变化信息;根据位置变化信息,得到调整路径规划信息,控制
机械臂模型位姿计算方法、装置、电子设备和存储介质.pdf
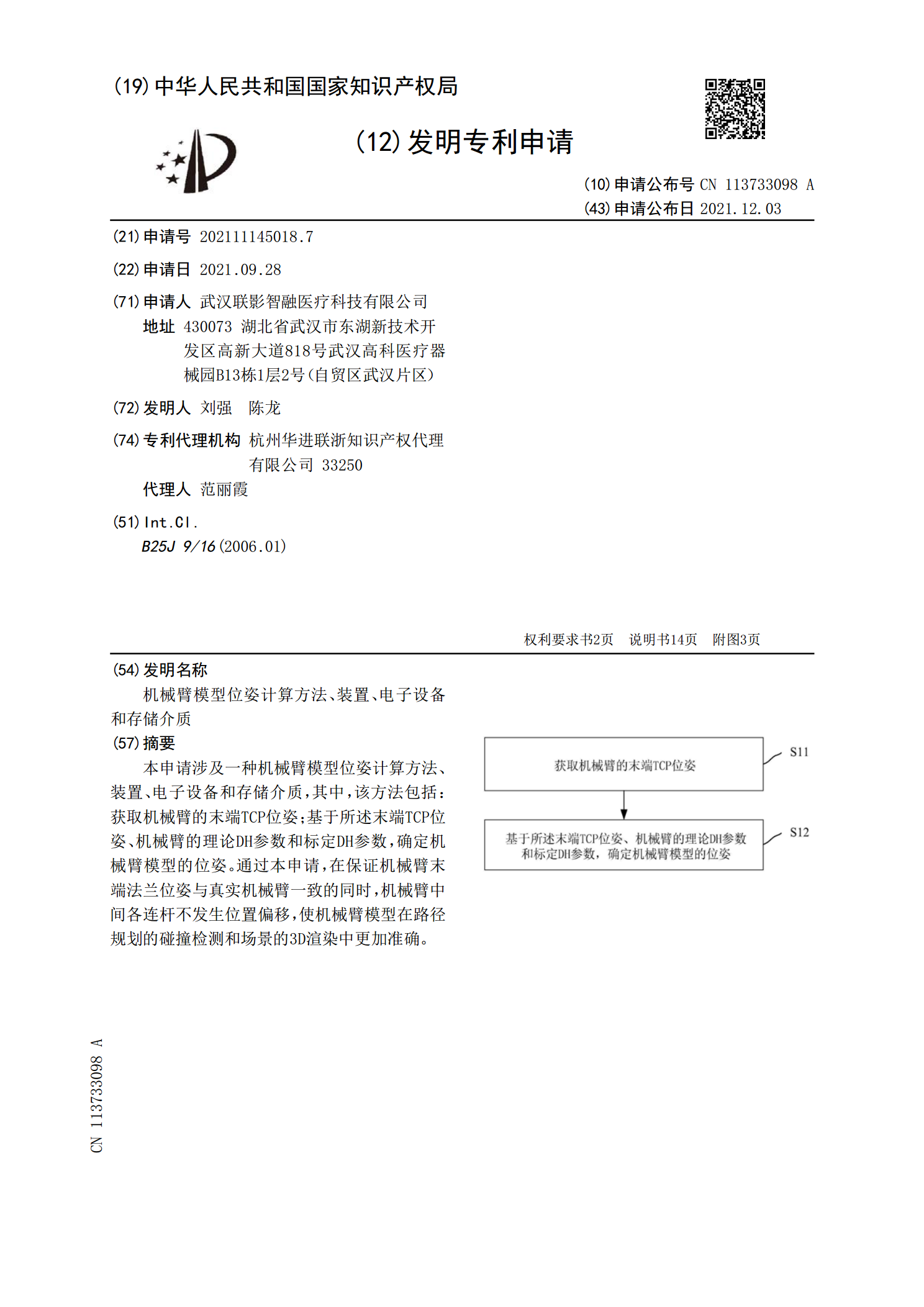
本申请涉及一种机械臂模型位姿计算方法、装置、电子设备和存储介质,其中,该方法包括:获取机械臂的末端TCP位姿;基于所述末端TCP位姿、机械臂的理论DH参数和标定DH参数,确定机械臂模型的位姿。通过本申请,在保证机械臂末端法兰位姿与真实机械臂一致的同时,机械臂中间各连杆不发生位置偏移,使机械臂模型在路径规划的碰撞检测和场景的3D渲染中更加准确。
机械臂路径规划系统、方法、装置、电子设备及存储介质.pdf
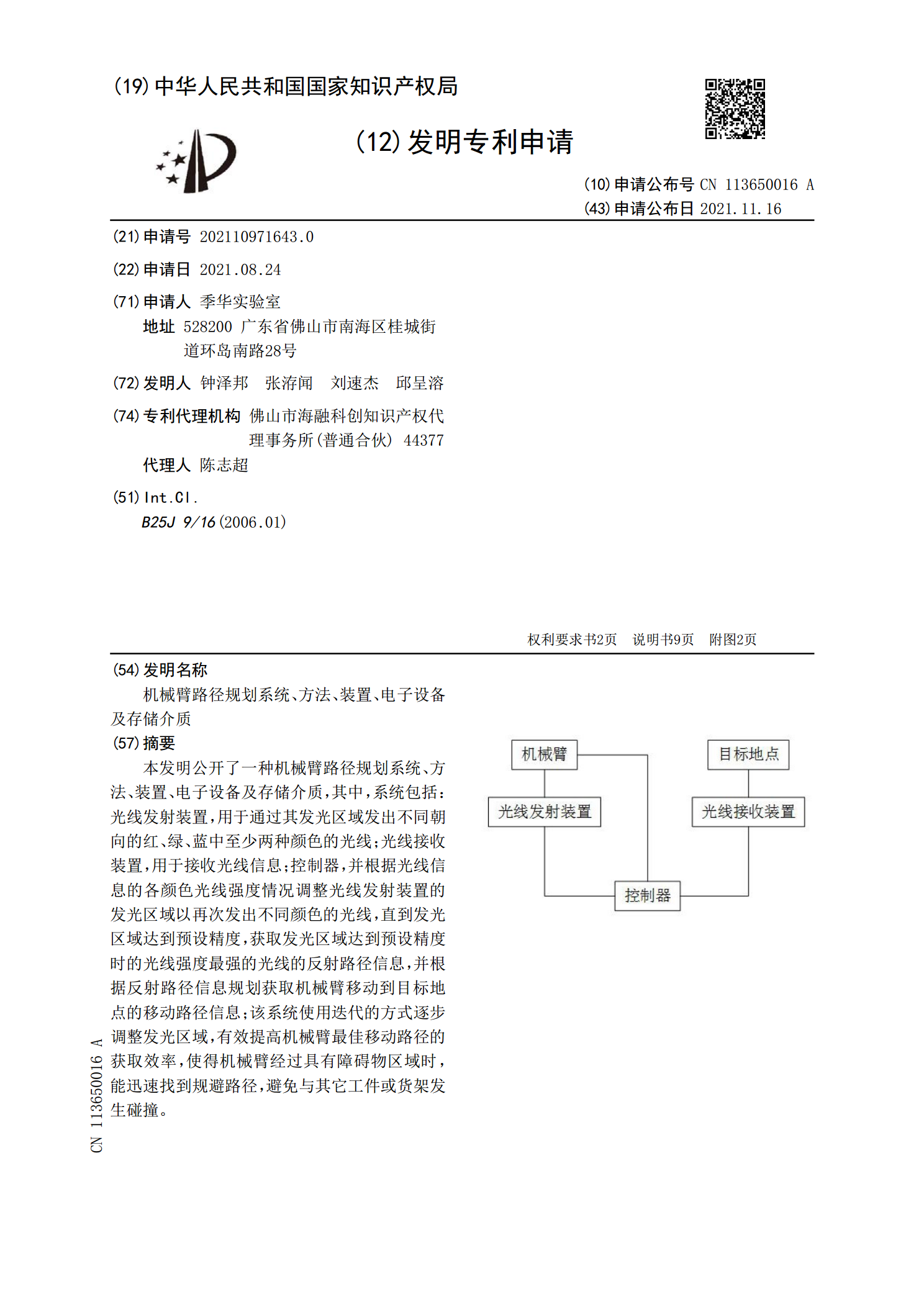
本发明公开了一种机械臂路径规划系统、方法、装置、电子设备及存储介质,其中,系统包括:光线发射装置,用于通过其发光区域发出不同朝向的红、绿、蓝中至少两种颜色的光线;光线接收装置,用于接收光线信息;控制器,并根据光线信息的各颜色光线强度情况调整光线发射装置的发光区域以再次发出不同颜色的光线,直到发光区域达到预设精度,获取发光区域达到预设精度时的光线强度最强的光线的反射路径信息,并根据反射路径信息规划获取机械臂移动到目标地点的移动路径信息;该系统使用迭代的方式逐步调整发光区域,有效提高机械臂最佳移动路径的获取效