
一种机械臂末端姿态调整方法及装置.pdf

努力****甲寅


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机械臂末端姿态调整方法及装置.pdf
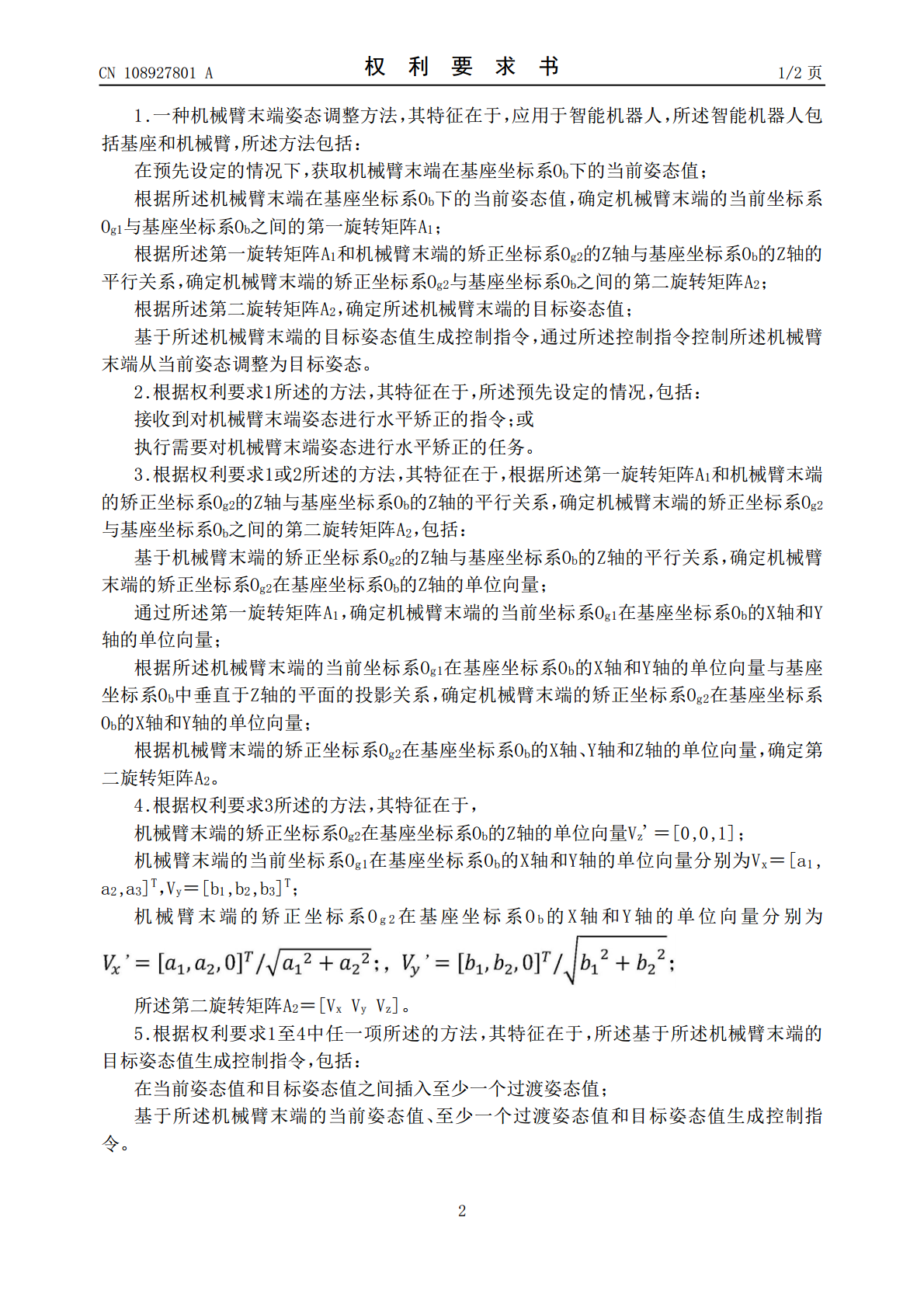
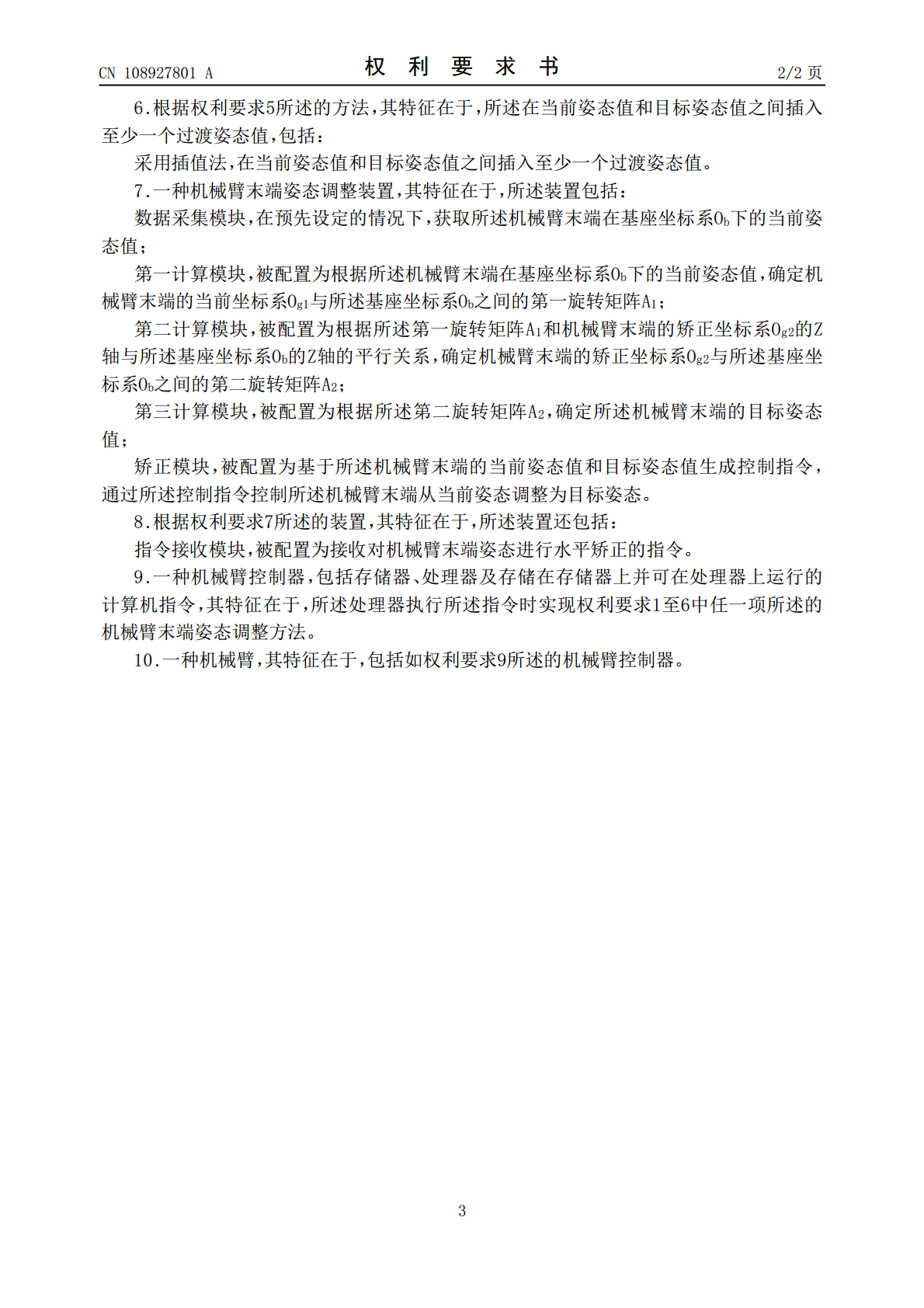
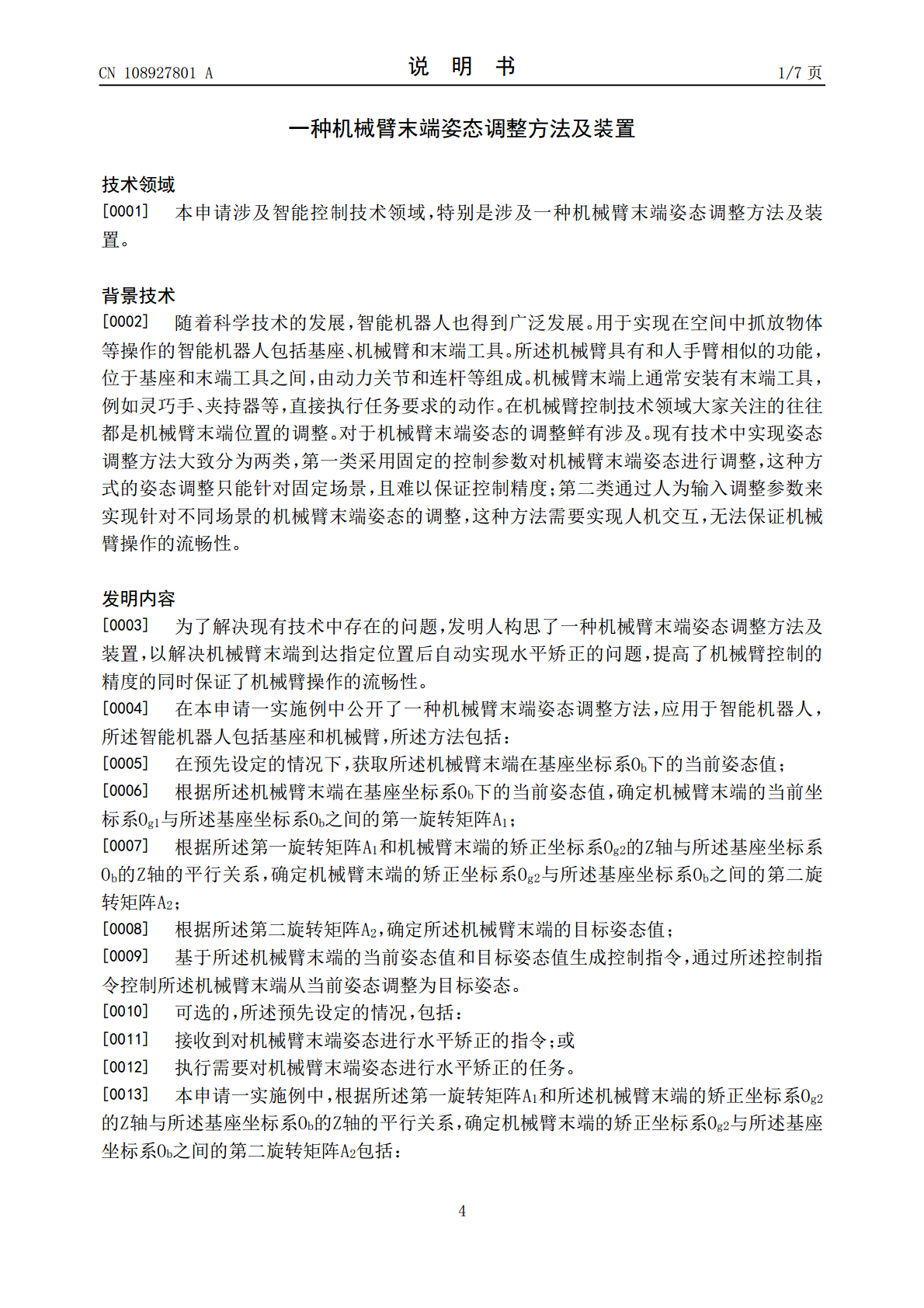
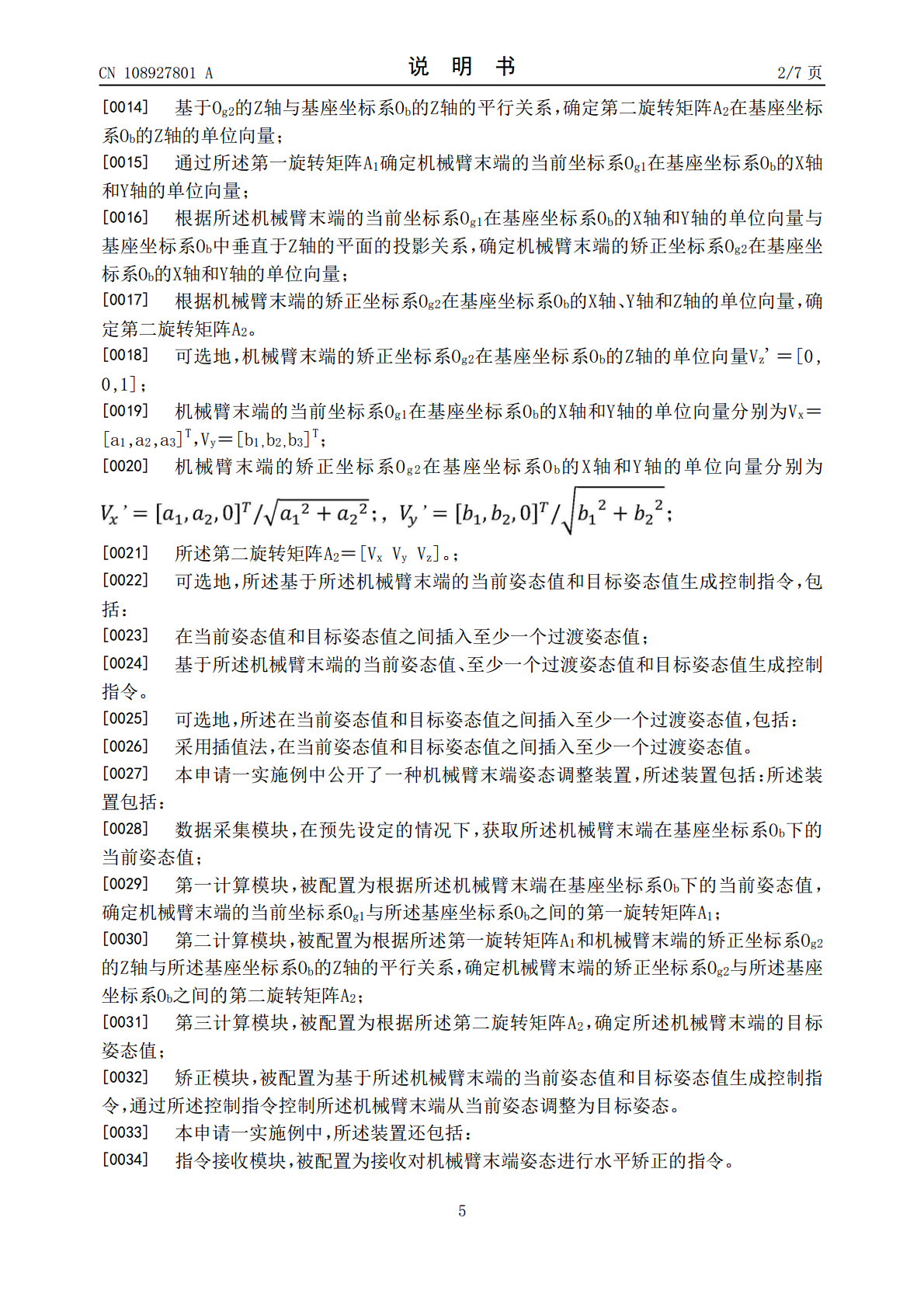
本申请公开了一种机械臂末端姿态调整方法及装置,应用于智能机器人,所述智能机器人包括基座和机械臂,所述方法包括:在预先设定的情况下,获取所述机械臂末端在基座坐标系O
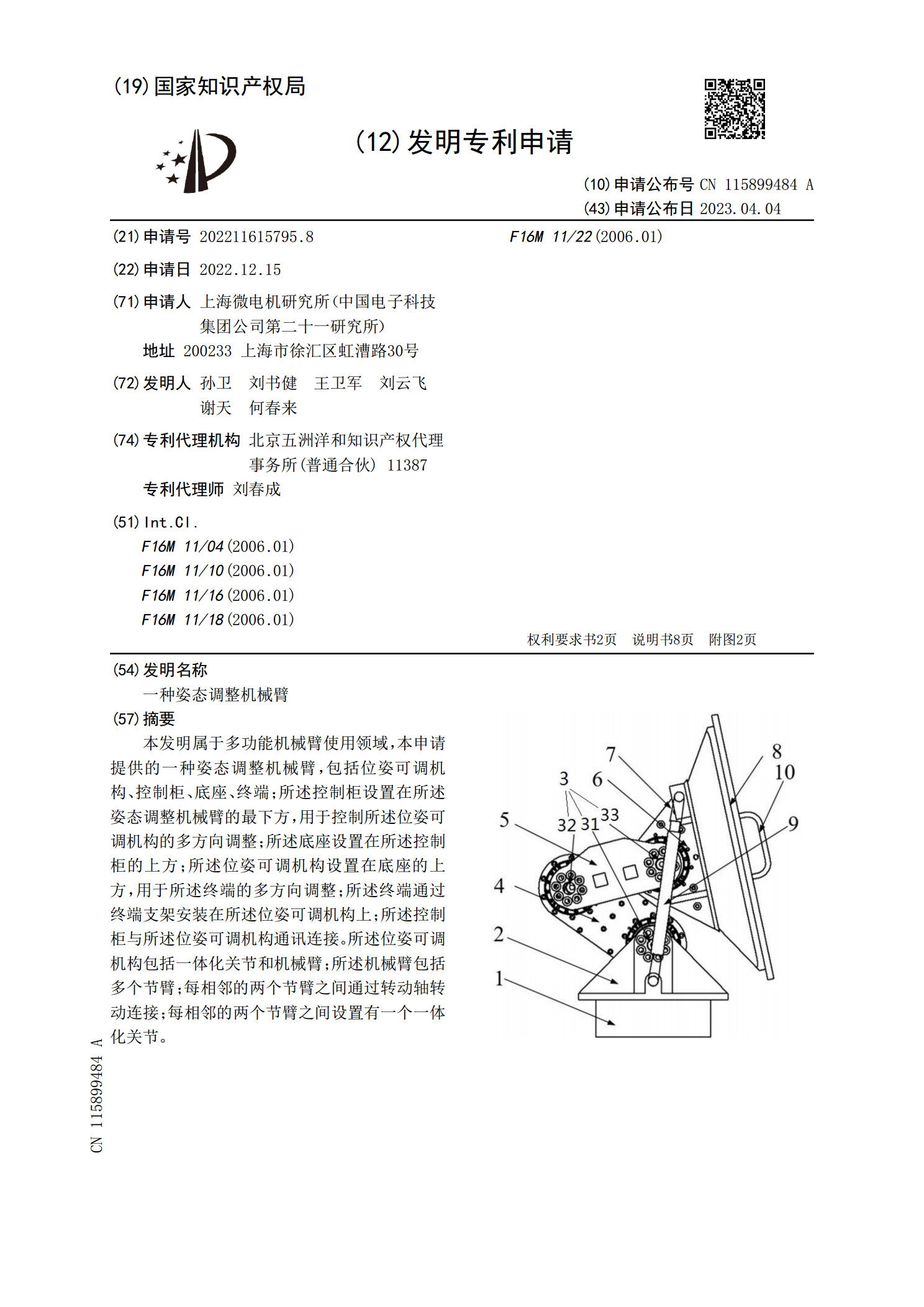
一种姿态调整机械臂.pdf
本发明属于多功能机械臂使用领域,本申请提供的一种姿态调整机械臂,包括位姿可调机构、控制柜、底座、终端;所述控制柜设置在所述姿态调整机械臂的最下方,用于控制所述位姿可调机构的多方向调整;所述底座设置在所述控制柜的上方;所述位姿可调机构设置在底座的上方,用于所述终端的多方向调整;所述终端通过终端支架安装在所述位姿可调机构上;所述控制柜与所述位姿可调机构通讯连接。所述位姿可调机构包括一体化关节和机械臂;所述机械臂包括多个节臂;每相邻的两个节臂之间通过转动轴转动连接;每相邻的两个节臂之间设置有一个一体化关节。

机械臂姿态检测方法和装置.pdf
本申请是关于一种机械臂姿态检测方法和装置。该方法包括以下步骤:获取机械臂上N个动态检测点在Ti时刻的N个检测位置坐标;所述N为大于或等于一的整数;其中,一个动态检测点在Ti时刻的检测位置坐标根据两个蓝牙模块分别在两个静态接收点的检测数据计算得到;获取所述机械臂在所述Ti时刻的N个预设位置坐标;根据N个所述检测位置坐标和N个所述预设位置坐标确定所述机械臂是否出现姿态偏差。本申请根据同一动态检测点在示教器训练时记录的Ti时刻的预设位置坐标和该动态检测点在Ti时刻的检测位置坐标进行比对,进而确认该动态检测点是否

模块化机械臂、吊装系统及姿态调整方法.pdf
本发明提供一种模块化机械臂、吊装系统及姿态调整方法,用于解决现有技术中无法对待吊装物件的姿态进行实时调整的问题。本发明提供一种模块化机械臂,包括:安装台和基座,所述基座转动安装在所述安装台上,所述基座上设有驾驶室和控制器;吊臂和第一驱动件,所述吊臂为可伸缩结构,所述吊臂下端铰接安装在所述基座上,所述第一驱动件驱动所述吊臂翻转;承重拉索机构,所述承重拉索机构包括承重拉索、承重拉索驱动件、顶部滑轮组和承重吊钩;姿态调整机构,所述姿态调整机构包括第一姿态调整拉索、第一姿态调整驱动件、第一中部滑轮组和第一姿态调整
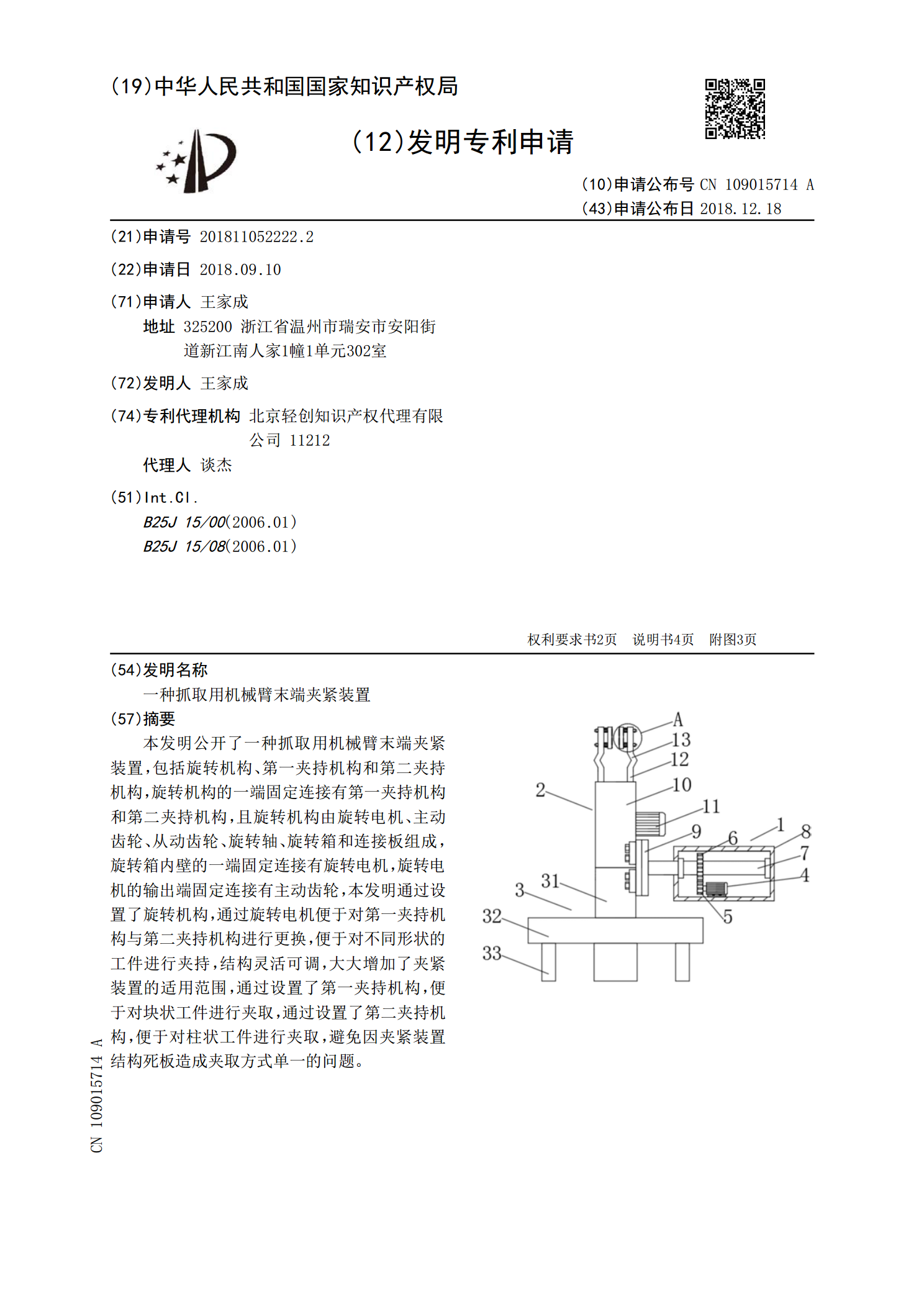
一种抓取用机械臂末端夹紧装置.pdf
本发明公开了一种抓取用机械臂末端夹紧装置,包括旋转机构、第一夹持机构和第二夹持机构,旋转机构的一端固定连接有第一夹持机构和第二夹持机构,且旋转机构由旋转电机、主动齿轮、从动齿轮、旋转轴、旋转箱和连接板组成,旋转箱内壁的一端固定连接有旋转电机,旋转电机的输出端固定连接有主动齿轮,本发明通过设置了旋转机构,通过旋转电机便于对第一夹持机构与第二夹持机构进行更换,便于对不同形状的工件进行夹持,结构灵活可调,大大增加了夹紧装置的适用范围,通过设置了第一夹持机构,便于对块状工件进行夹取,通过设置了第二夹持机构,便于对