
一种抓取用机械臂末端夹紧装置.pdf

Ma****57

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种抓取用机械臂末端夹紧装置.pdf
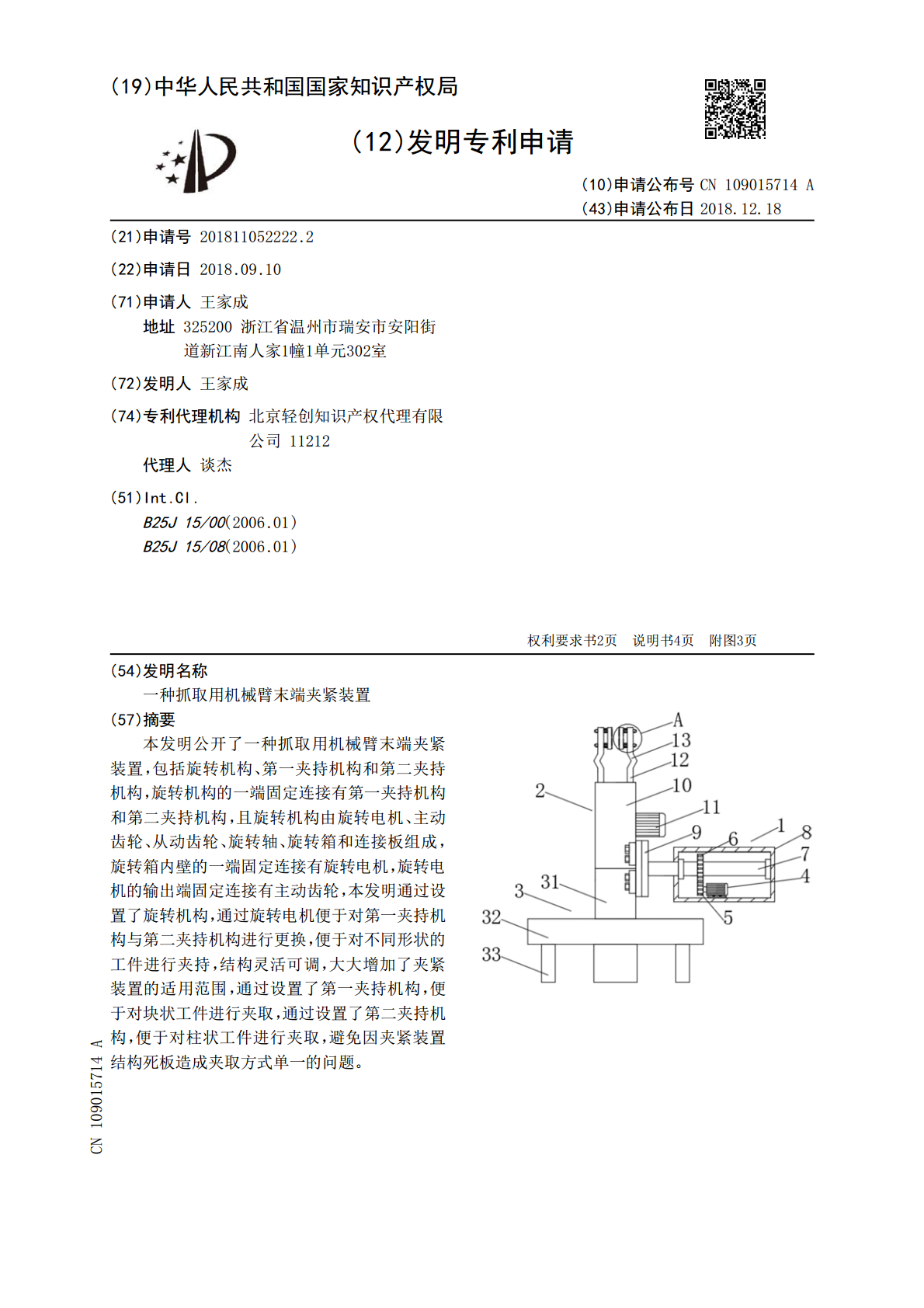
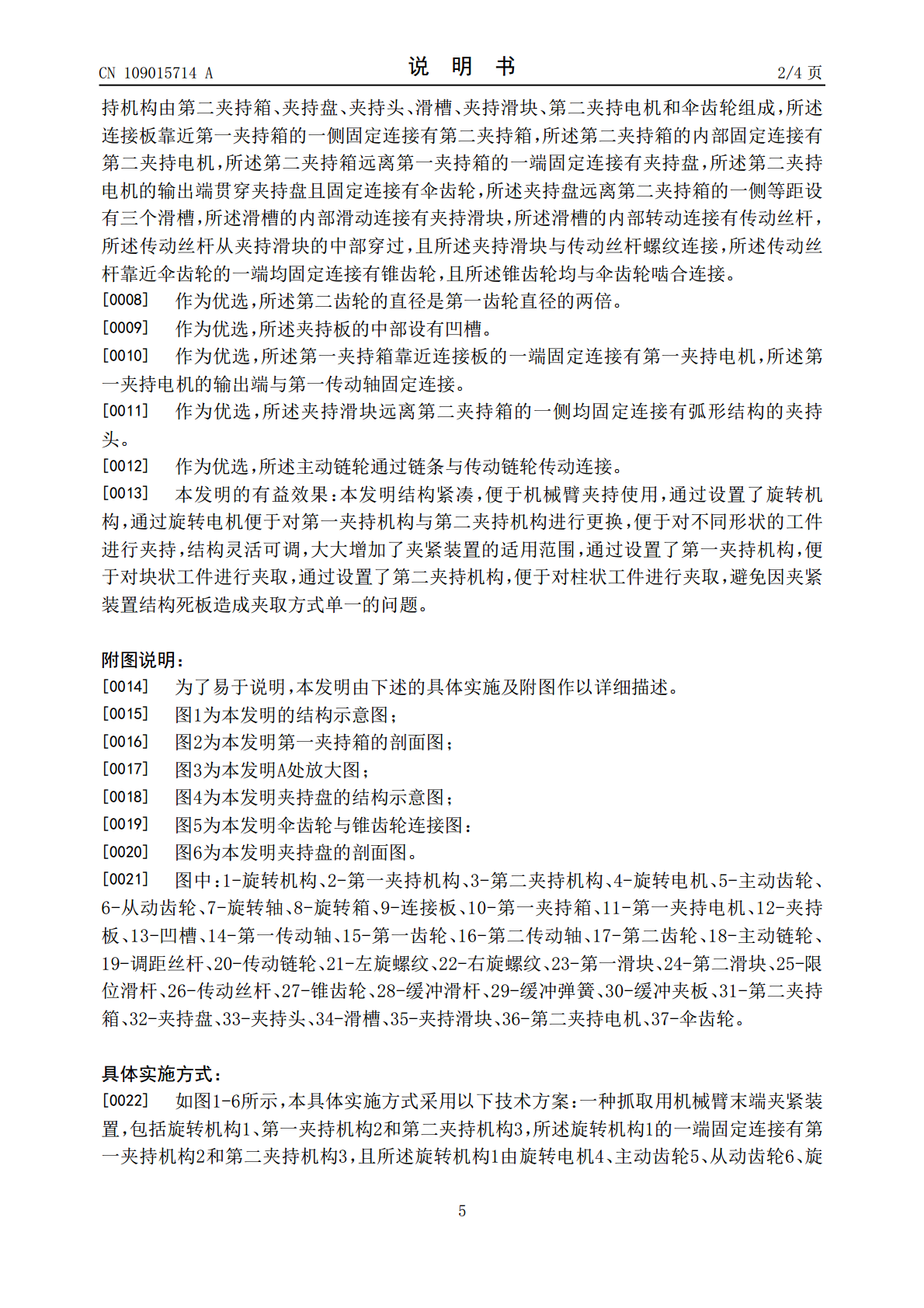
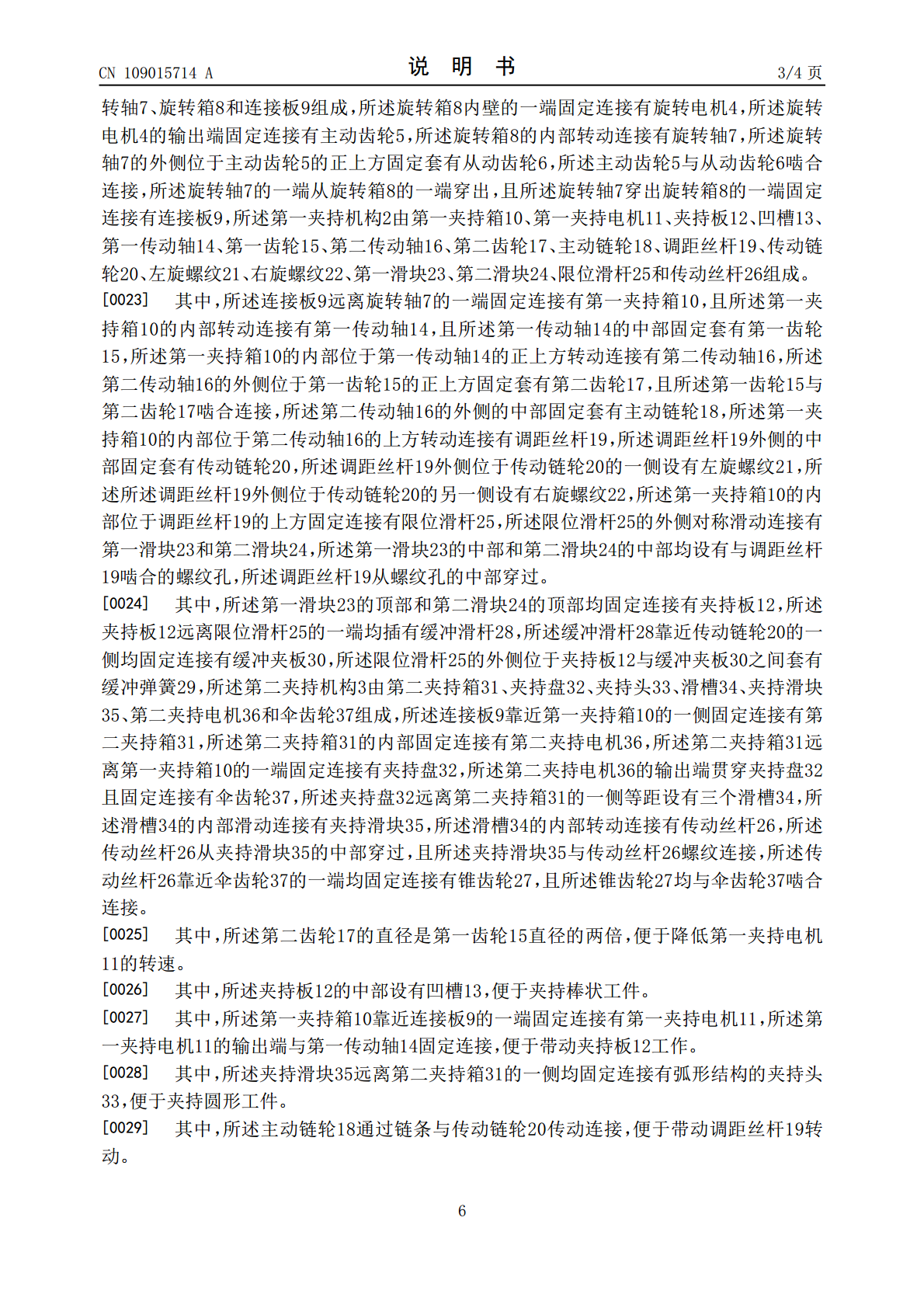
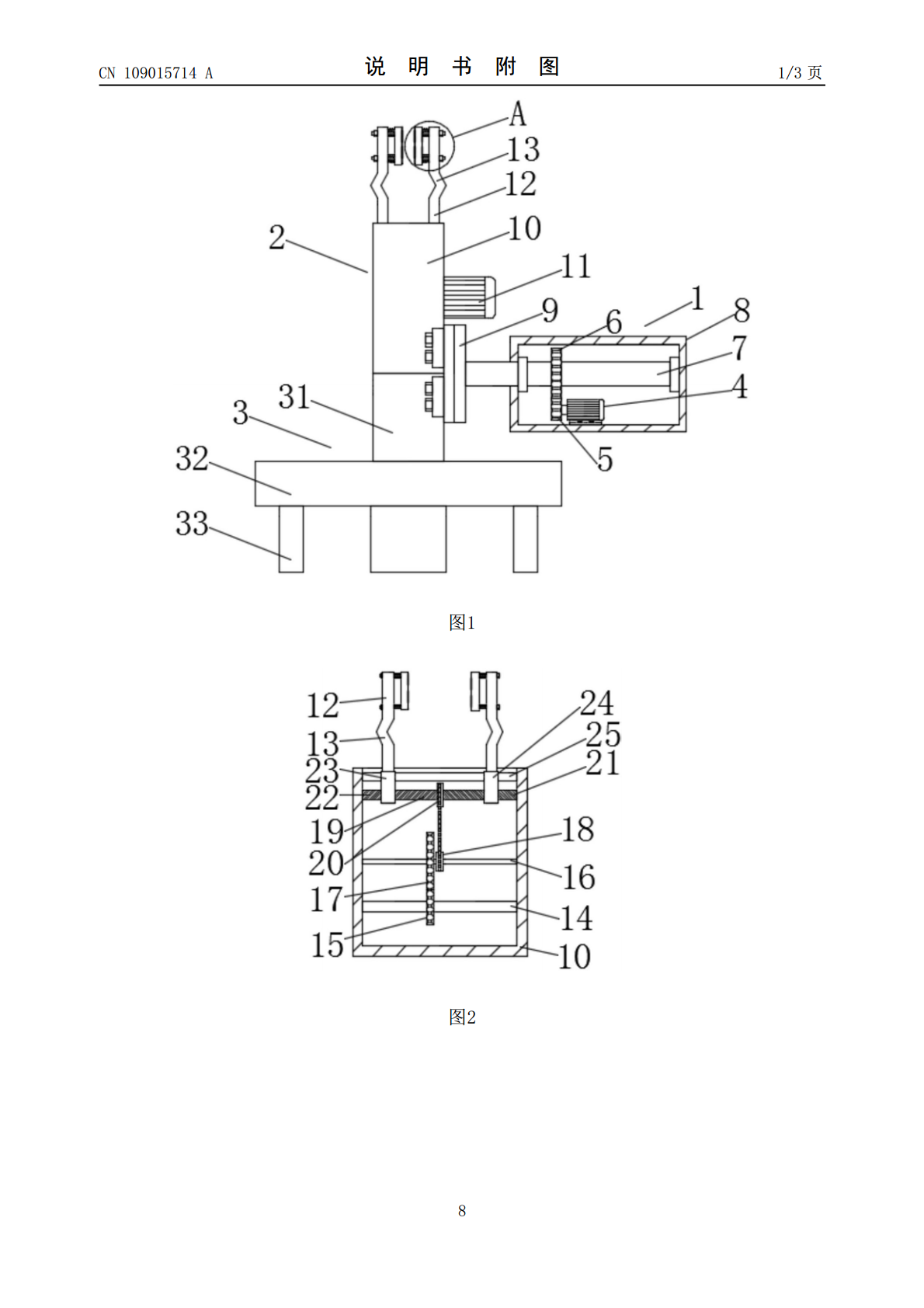
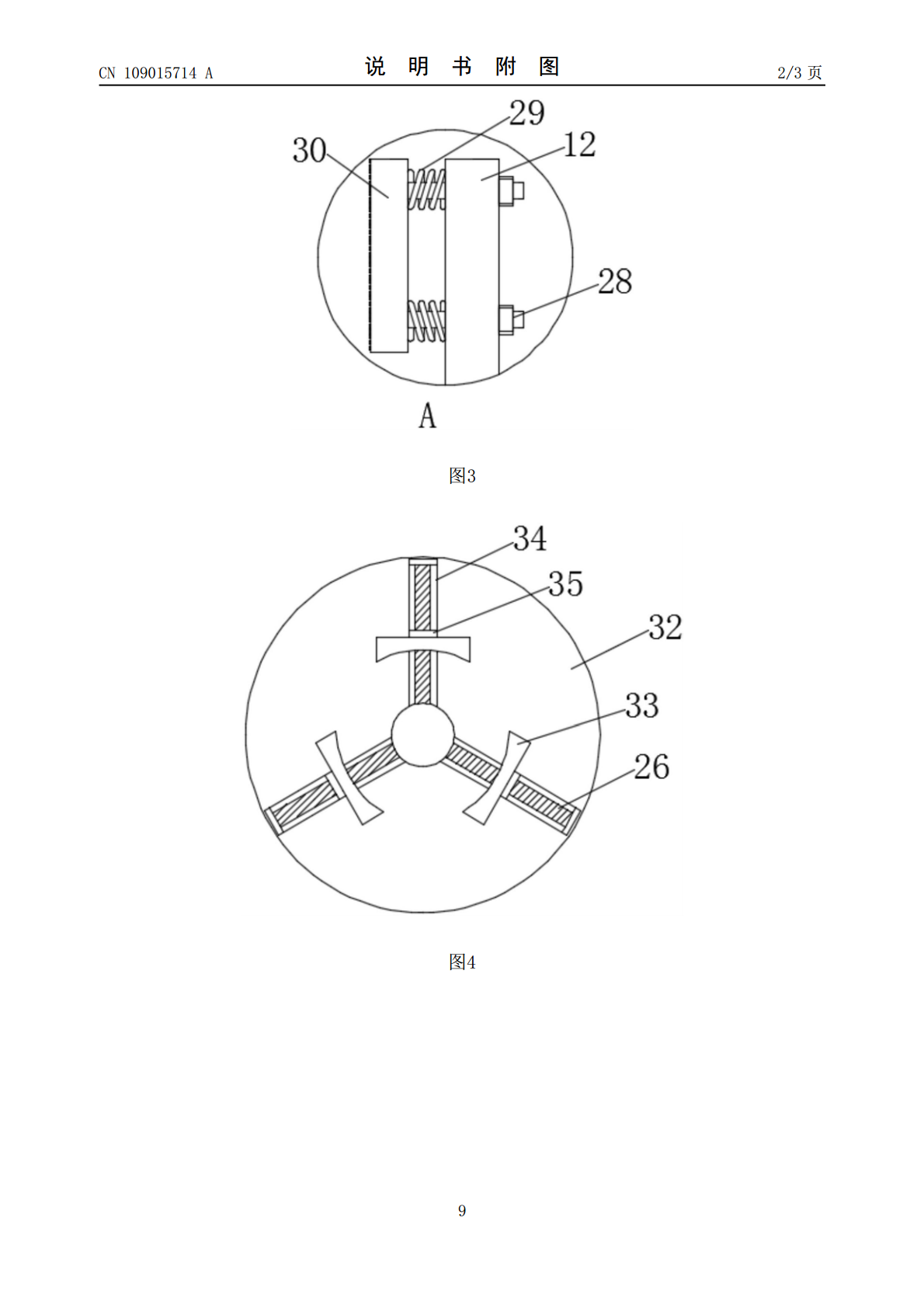
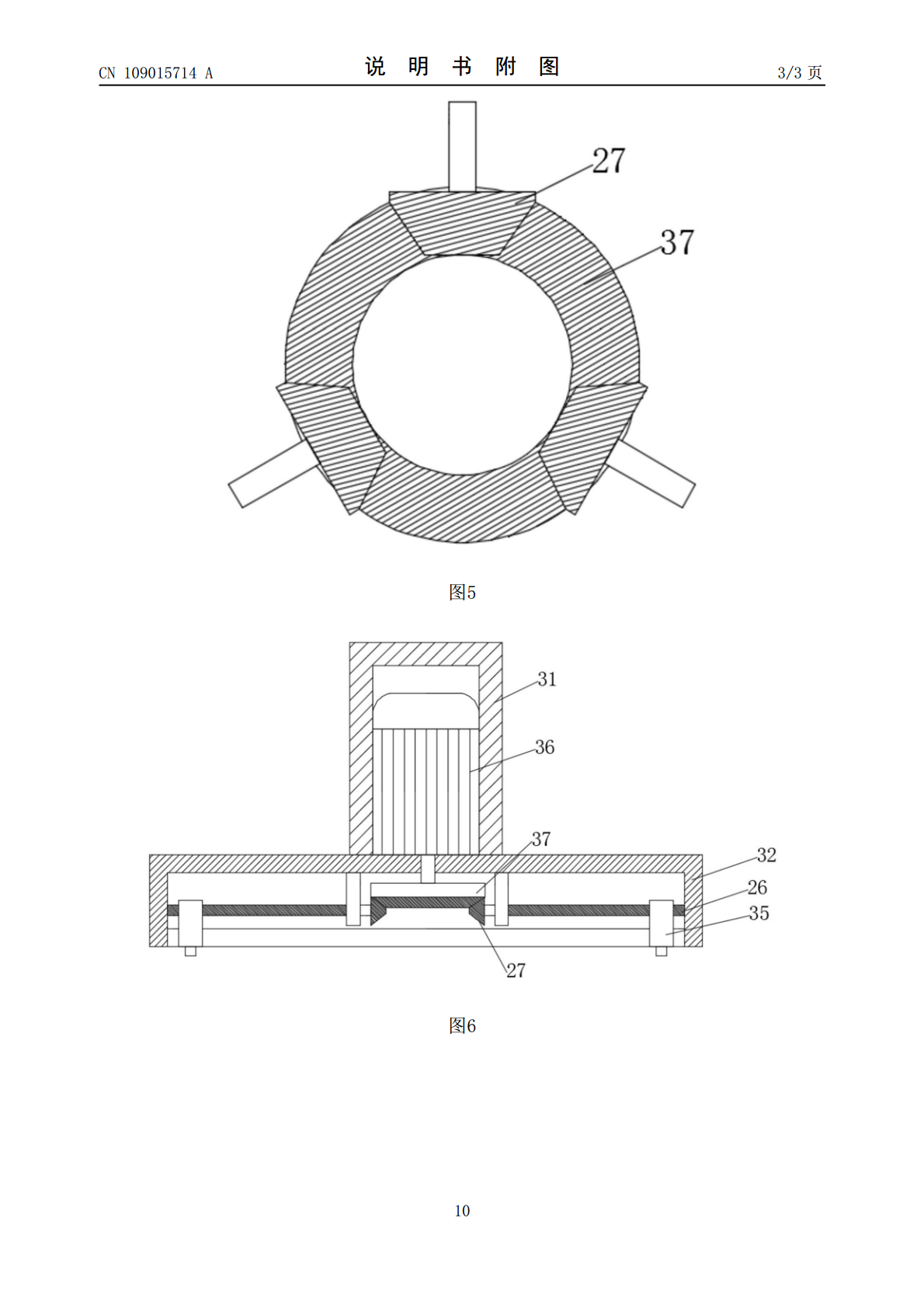
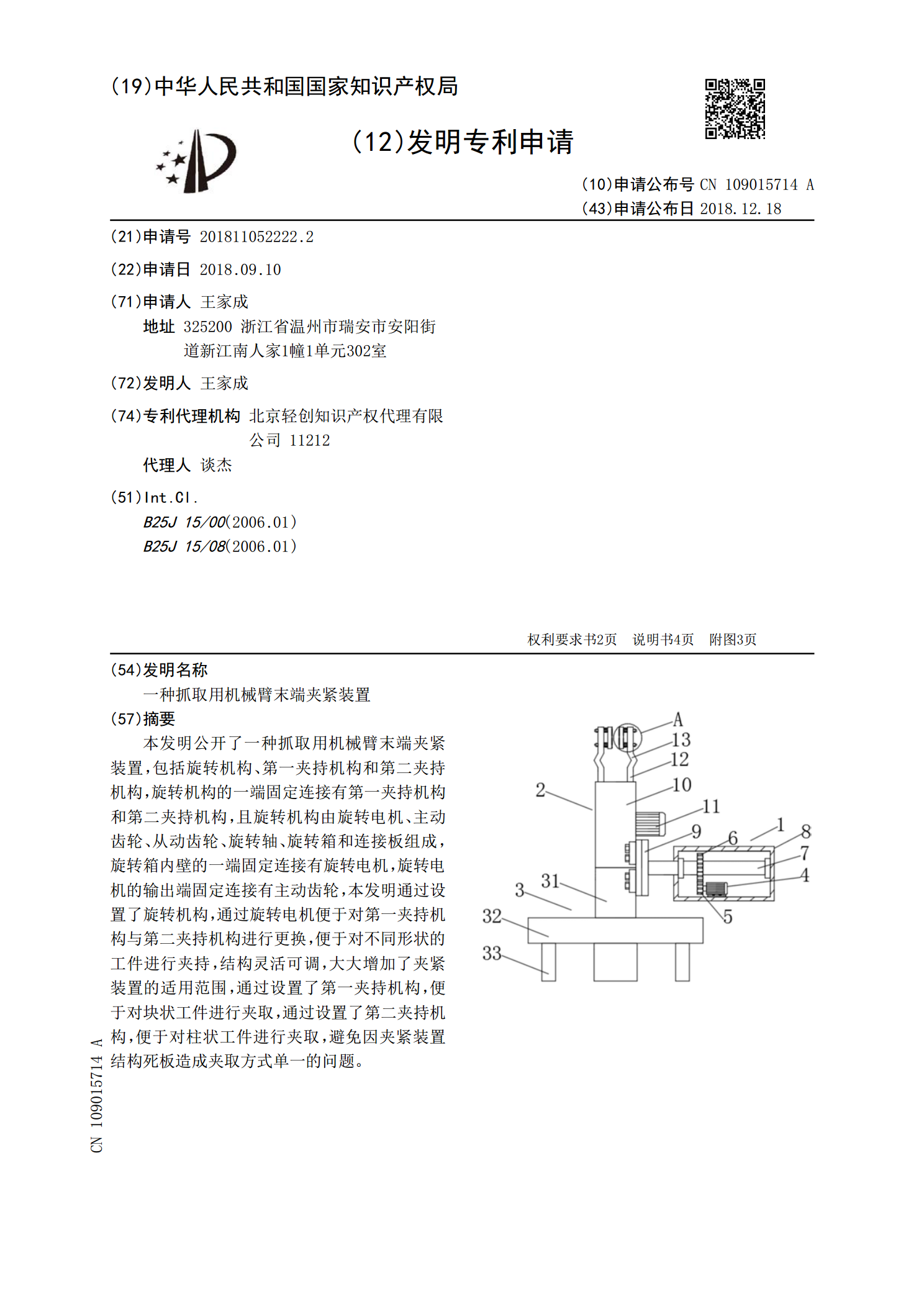
本发明公开了一种抓取用机械臂末端夹紧装置,包括旋转机构、第一夹持机构和第二夹持机构,旋转机构的一端固定连接有第一夹持机构和第二夹持机构,且旋转机构由旋转电机、主动齿轮、从动齿轮、旋转轴、旋转箱和连接板组成,旋转箱内壁的一端固定连接有旋转电机,旋转电机的输出端固定连接有主动齿轮,本发明通过设置了旋转机构,通过旋转电机便于对第一夹持机构与第二夹持机构进行更换,便于对不同形状的工件进行夹持,结构灵活可调,大大增加了夹紧装置的适用范围,通过设置了第一夹持机构,便于对块状工件进行夹取,通过设置了第二夹持机构,便于对
一种小型机械臂末端夹紧装置.pdf
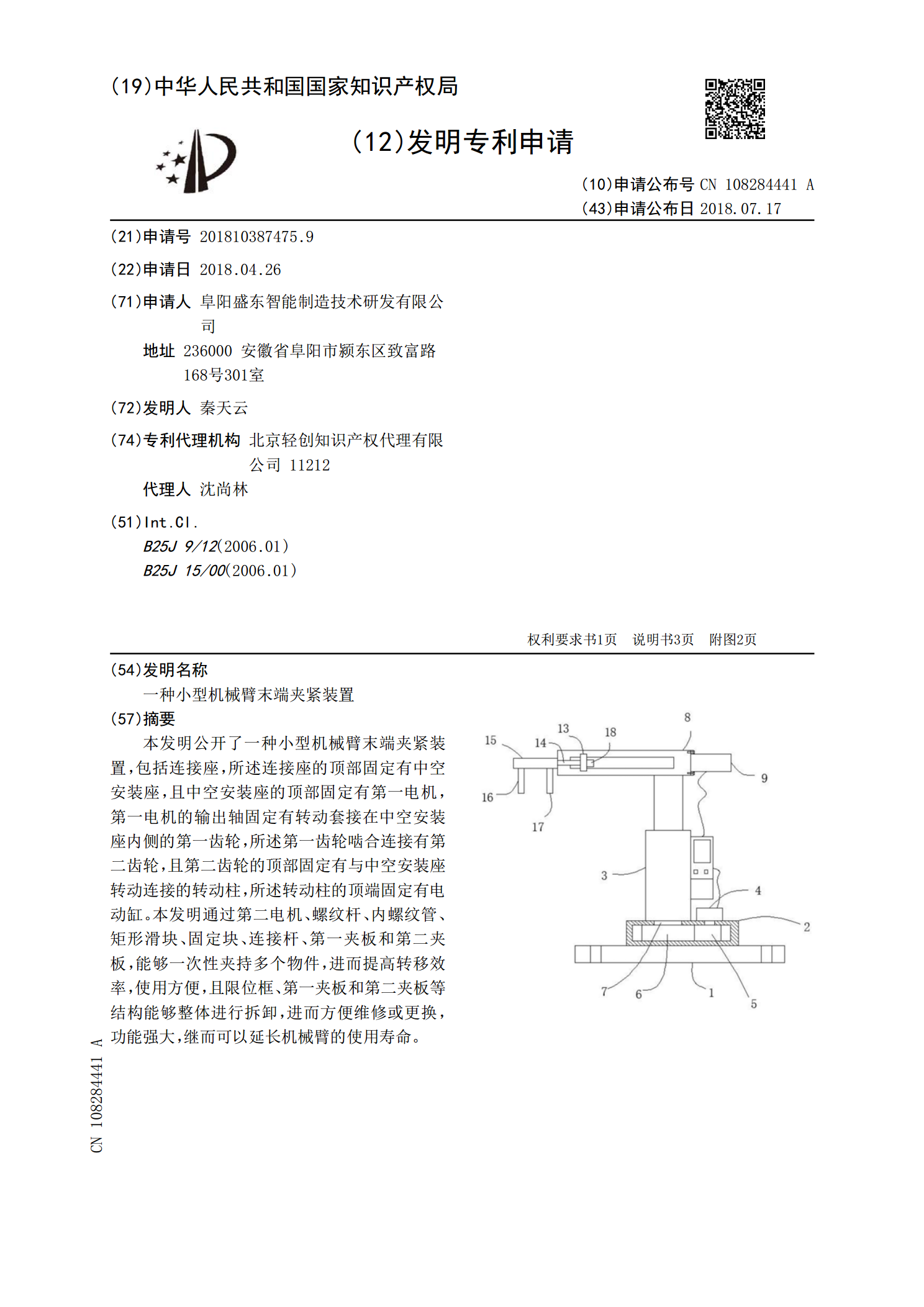
本发明公开了一种小型机械臂末端夹紧装置,包括连接座,所述连接座的顶部固定有中空安装座,且中空安装座的顶部固定有第一电机,第一电机的输出轴固定有转动套接在中空安装座内侧的第一齿轮,所述第一齿轮啮合连接有第二齿轮,且第二齿轮的顶部固定有与中空安装座转动连接的转动柱,所述转动柱的顶端固定有电动缸。本发明通过第二电机、螺纹杆、内螺纹管、矩形滑块、固定块、连接杆、第一夹板和第二夹板,能够一次性夹持多个物件,进而提高转移效率,使用方便,且限位框、第一夹板和第二夹板等结构能够整体进行拆卸,进而方便维修或更换,功能强大,

一种机械臂末端姿态调整方法及装置.pdf
本申请公开了一种机械臂末端姿态调整方法及装置,应用于智能机器人,所述智能机器人包括基座和机械臂,所述方法包括:在预先设定的情况下,获取所述机械臂末端在基座坐标系O
一种可转换的机械臂末端夹具及机械臂.pdf
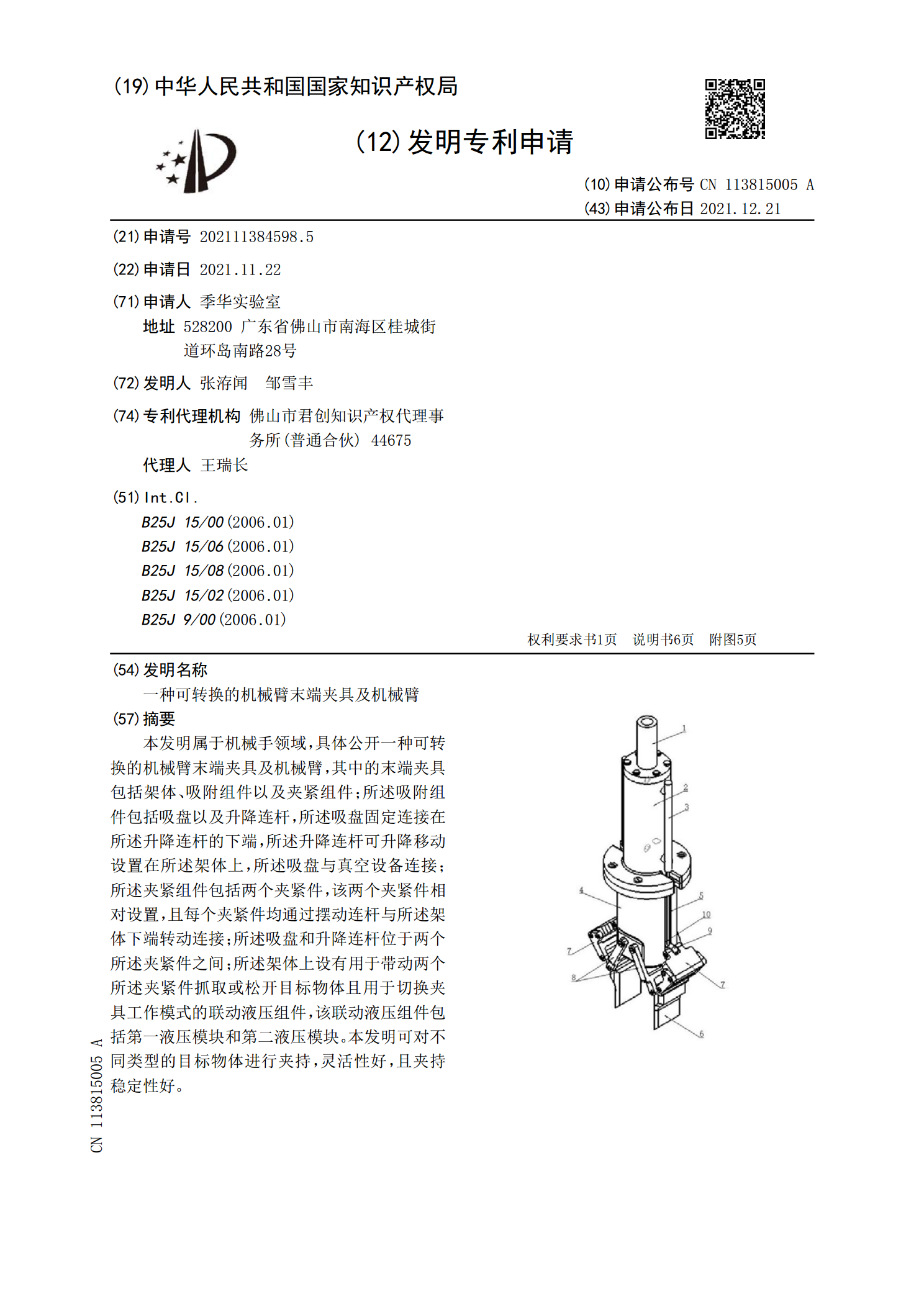
本发明属于机械手领域,具体公开一种可转换的机械臂末端夹具及机械臂,其中的末端夹具包括架体、吸附组件以及夹紧组件;所述吸附组件包括吸盘以及升降连杆,所述吸盘固定连接在所述升降连杆的下端,所述升降连杆可升降移动设置在所述架体上,所述吸盘与真空设备连接;所述夹紧组件包括两个夹紧件,该两个夹紧件相对设置,且每个夹紧件均通过摆动连杆与所述架体下端转动连接;所述吸盘和升降连杆位于两个所述夹紧件之间;所述架体上设有用于带动两个所述夹紧件抓取或松开目标物体且用于切换夹具工作模式的联动液压组件,该联动液压组件包括第一液压模
带末端力控机械臂的延伸装置及具有其的机械臂.pdf
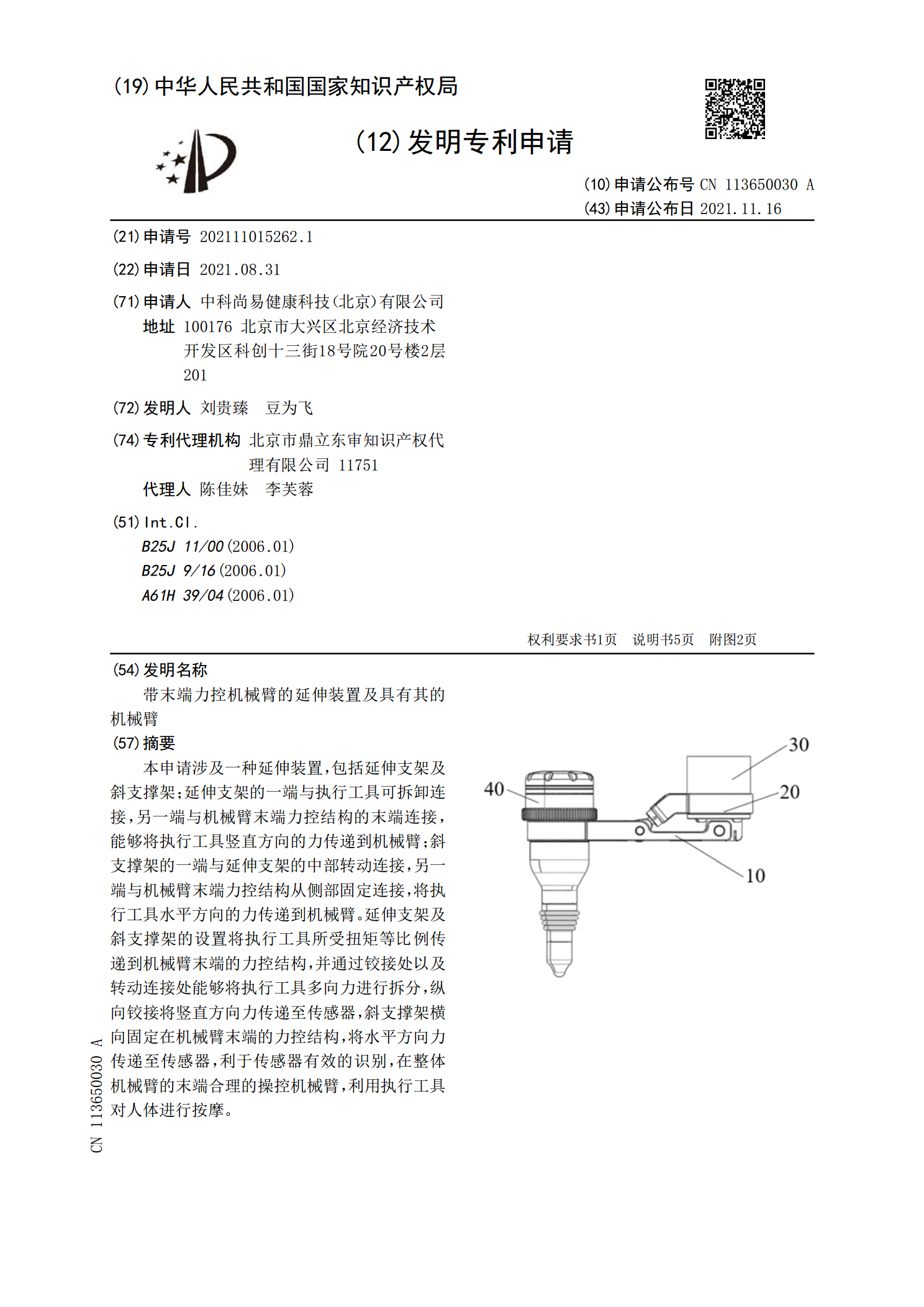
本申请涉及一种延伸装置,包括延伸支架及斜支撑架;延伸支架的一端与执行工具可拆卸连接,另一端与机械臂末端力控结构的末端连接,能够将执行工具竖直方向的力传递到机械臂;斜支撑架的一端与延伸支架的中部转动连接,另一端与机械臂末端力控结构从侧部固定连接,将执行工具水平方向的力传递到机械臂。延伸支架及斜支撑架的设置将执行工具所受扭矩等比例传递到机械臂末端的力控结构,并通过铰接处以及转动连接处能够将执行工具多向力进行拆分,纵向铰接将竖直方向力传递至传感器,斜支撑架横向固定在机械臂末端的力控结构,将水平方向力传递至传感器