
机械臂姿态检测方法和装置.pdf

宛菡****魔王


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机械臂姿态检测方法和装置.pdf
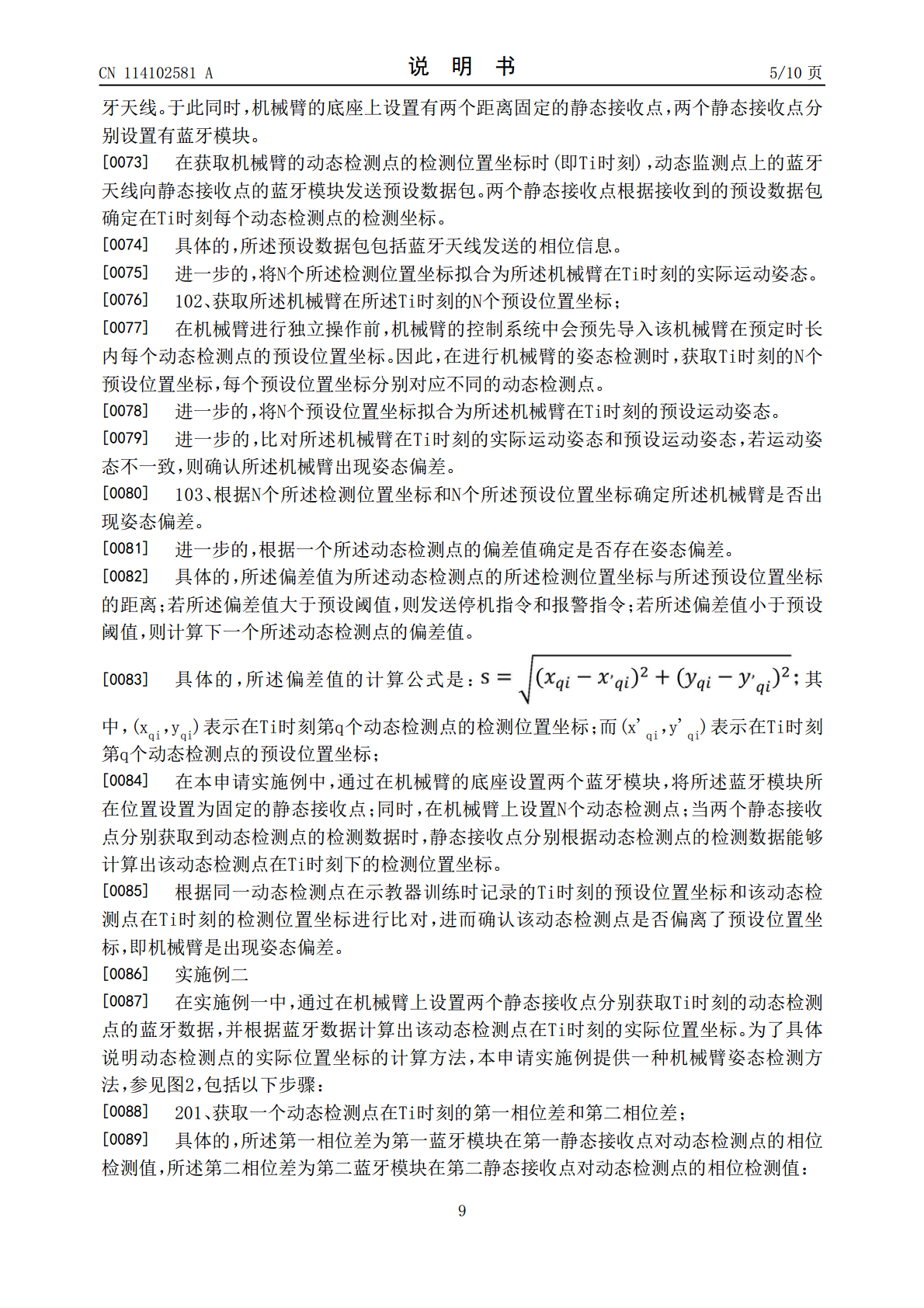
本申请是关于一种机械臂姿态检测方法和装置。该方法包括以下步骤:获取机械臂上N个动态检测点在Ti时刻的N个检测位置坐标;所述N为大于或等于一的整数;其中,一个动态检测点在Ti时刻的检测位置坐标根据两个蓝牙模块分别在两个静态接收点的检测数据计算得到;获取所述机械臂在所述Ti时刻的N个预设位置坐标;根据N个所述检测位置坐标和N个所述预设位置坐标确定所述机械臂是否出现姿态偏差。本申请根据同一动态检测点在示教器训练时记录的Ti时刻的预设位置坐标和该动态检测点在Ti时刻的检测位置坐标进行比对,进而确认该动态检测点是否

一种机械臂末端姿态调整方法及装置.pdf
本申请公开了一种机械臂末端姿态调整方法及装置,应用于智能机器人,所述智能机器人包括基座和机械臂,所述方法包括:在预先设定的情况下,获取所述机械臂末端在基座坐标系O
一种机械臂姿态误差补偿方法、装置、设备及存储介质.pdf
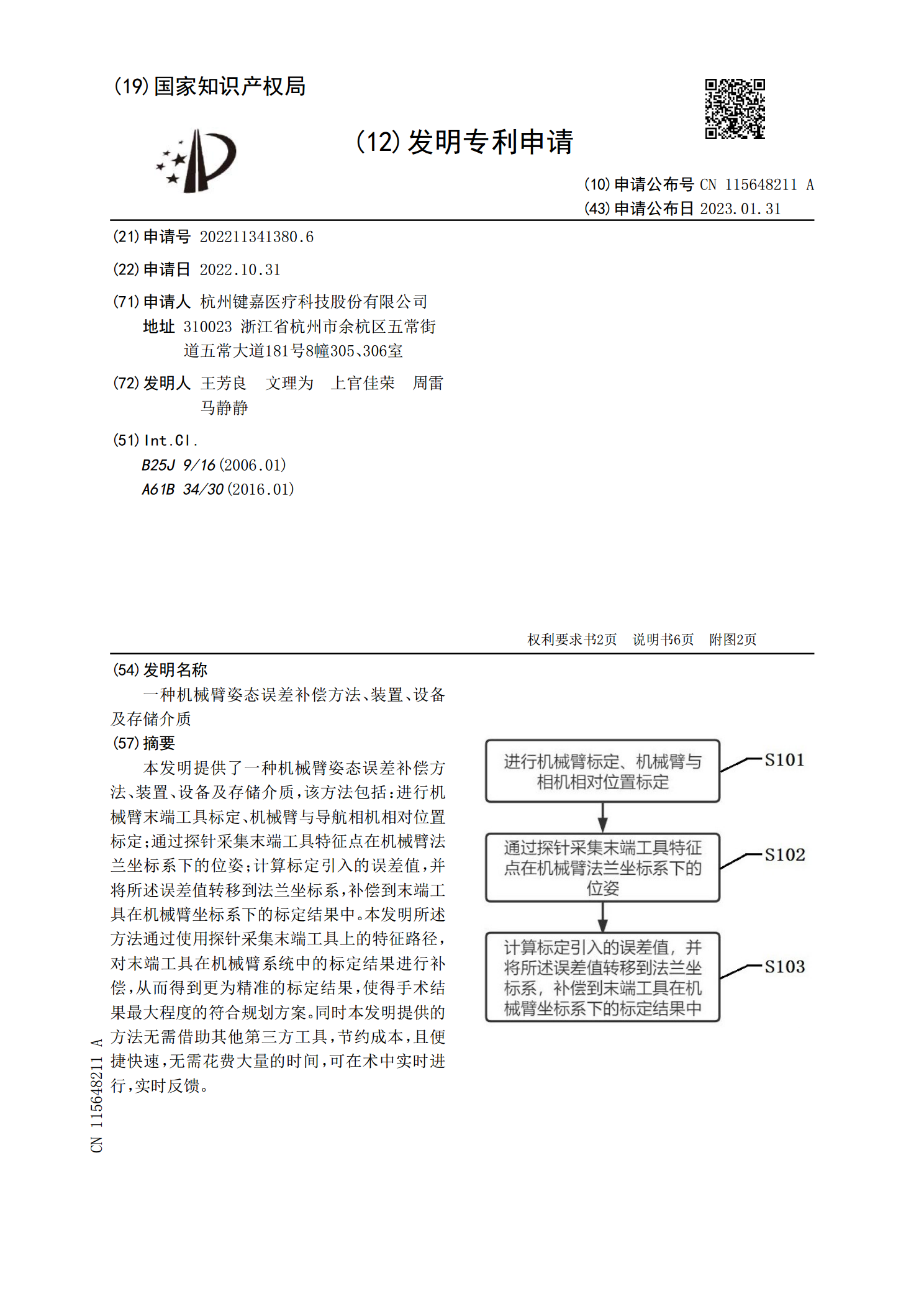
本发明提供了一种机械臂姿态误差补偿方法、装置、设备及存储介质,该方法包括:进行机械臂末端工具标定、机械臂与导航相机相对位置标定;通过探针采集末端工具特征点在机械臂法兰坐标系下的位姿;计算标定引入的误差值,并将所述误差值转移到法兰坐标系,补偿到末端工具在机械臂坐标系下的标定结果中。本发明所述方法通过使用探针采集末端工具上的特征路径,对末端工具在机械臂系统中的标定结果进行补偿,从而得到更为精准的标定结果,使得手术结果最大程度的符合规划方案。同时本发明提供的方法无需借助其他第三方工具,节约成本,且便捷快速,无需
用于行人检测和姿态估计的方法和装置.pdf
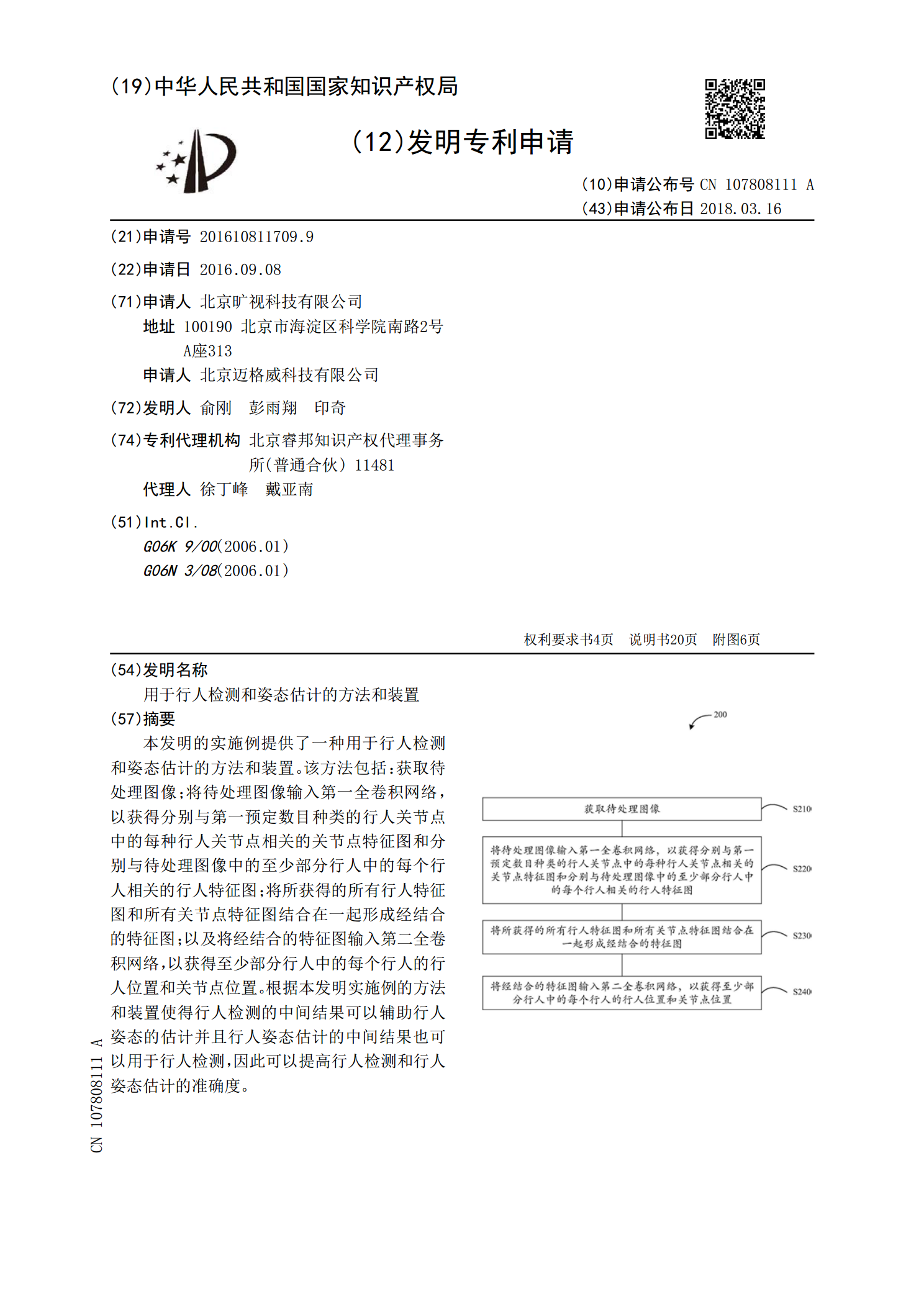
本发明的实施例提供了一种用于行人检测和姿态估计的方法和装置。该方法包括:获取待处理图像;将待处理图像输入第一全卷积网络,以获得分别与第一预定数目种类的行人关节点中的每种行人关节点相关的关节点特征图和分别与待处理图像中的至少部分行人中的每个行人相关的行人特征图;将所获得的所有行人特征图和所有关节点特征图结合在一起形成经结合的特征图;以及将经结合的特征图输入第二全卷积网络,以获得至少部分行人中的每个行人的行人位置和关节点位置。根据本发明实施例的方法和装置使得行人检测的中间结果可以辅助行人姿态的估计并且行人姿态
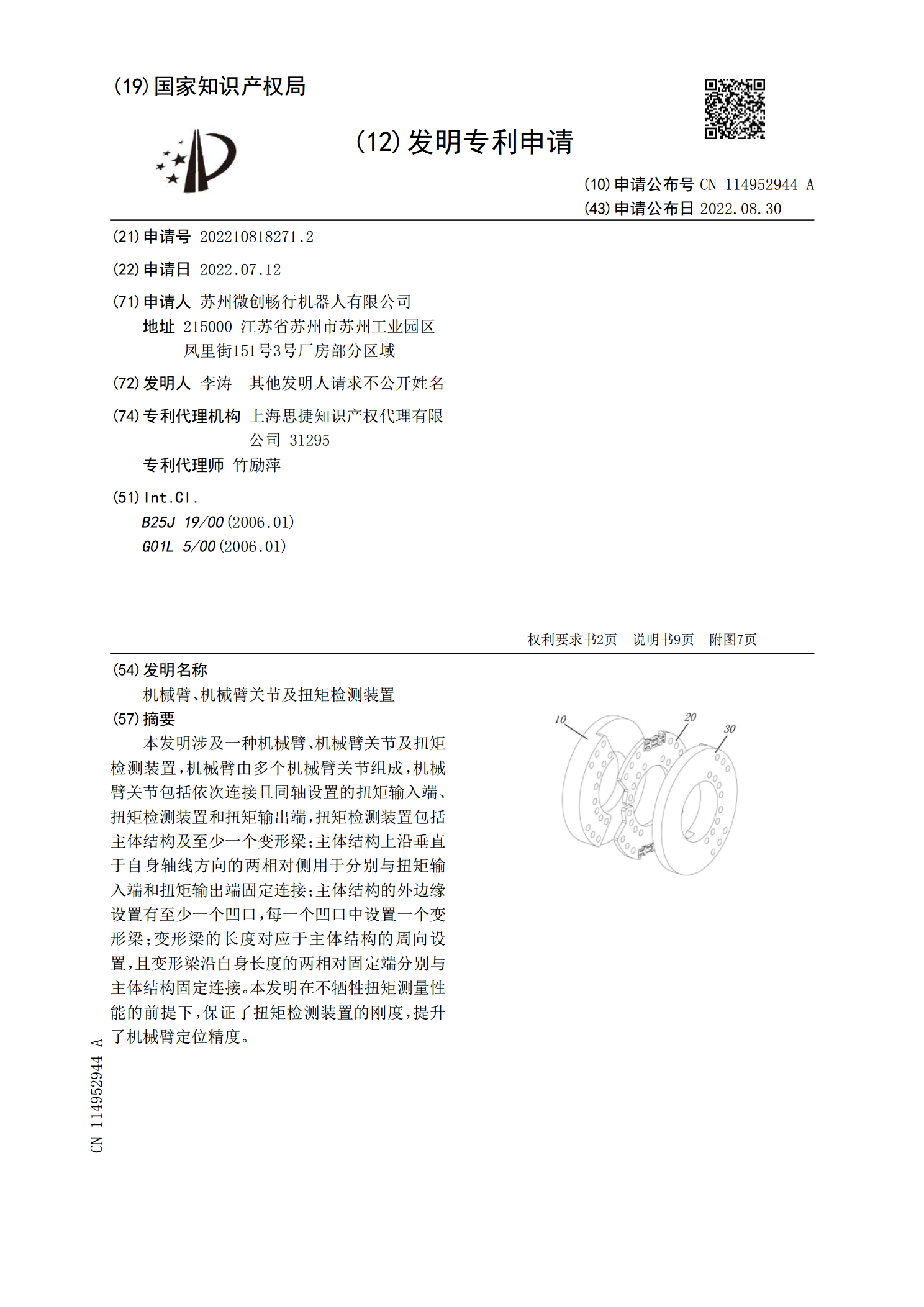
机械臂、机械臂关节及扭矩检测装置.pdf
本发明涉及一种机械臂、机械臂关节及扭矩检测装置,机械臂由多个机械臂关节组成,机械臂关节包括依次连接且同轴设置的扭矩输入端、扭矩检测装置和扭矩输出端,扭矩检测装置包括主体结构及至少一个变形梁;主体结构上沿垂直于自身轴线方向的两相对侧用于分别与扭矩输入端和扭矩输出端固定连接;主体结构的外边缘设置有至少一个凹口,每一个凹口中设置一个变形梁;变形梁的长度对应于主体结构的周向设置,且变形梁沿自身长度的两相对固定端分别与主体结构固定连接。本发明在不牺牲扭矩测量性能的前提下,保证了扭矩检测装置的刚度,提升了机械臂定位精