
一种姿态调整机械臂.pdf

是来****文章


1/10
2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种姿态调整机械臂.pdf
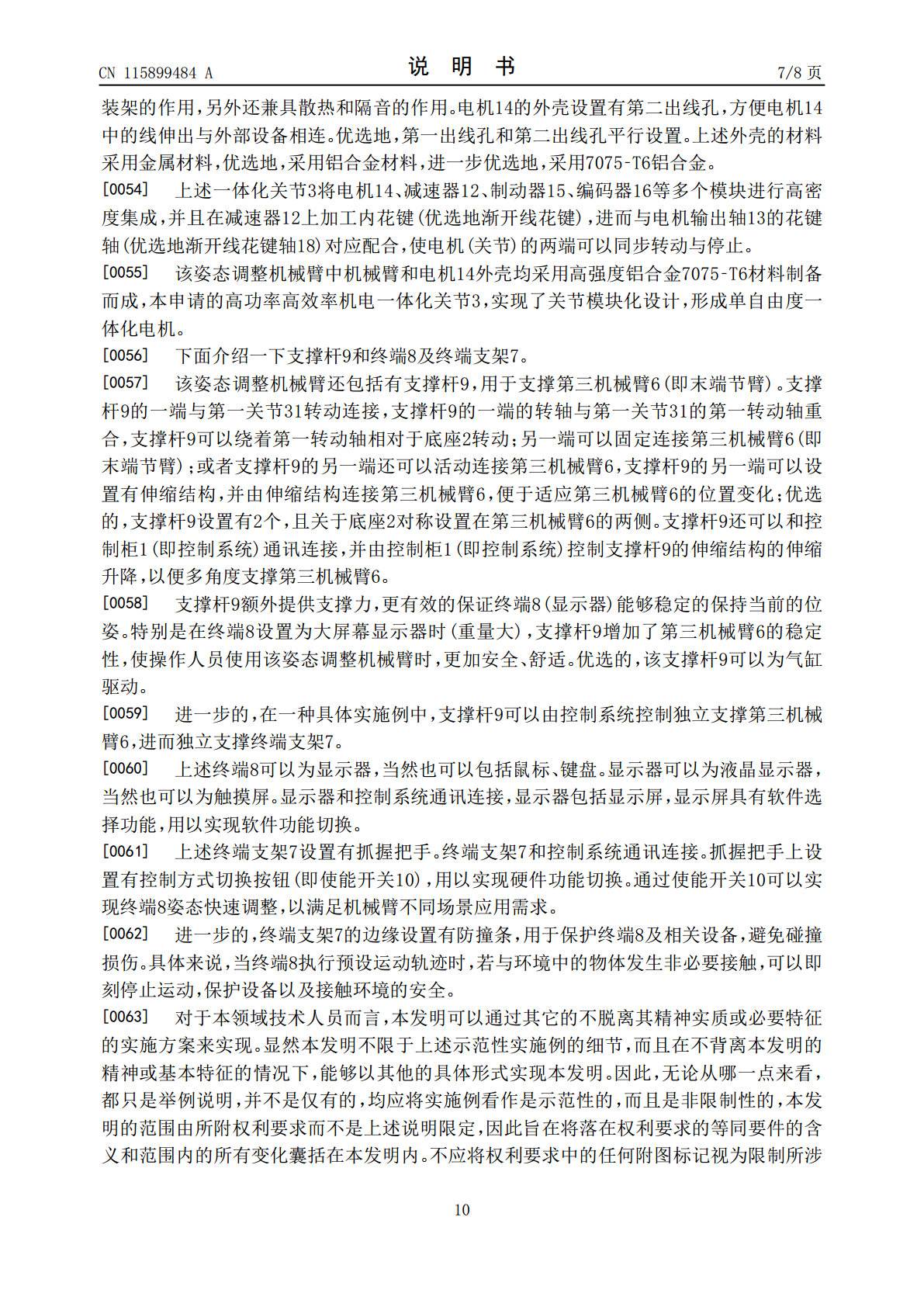
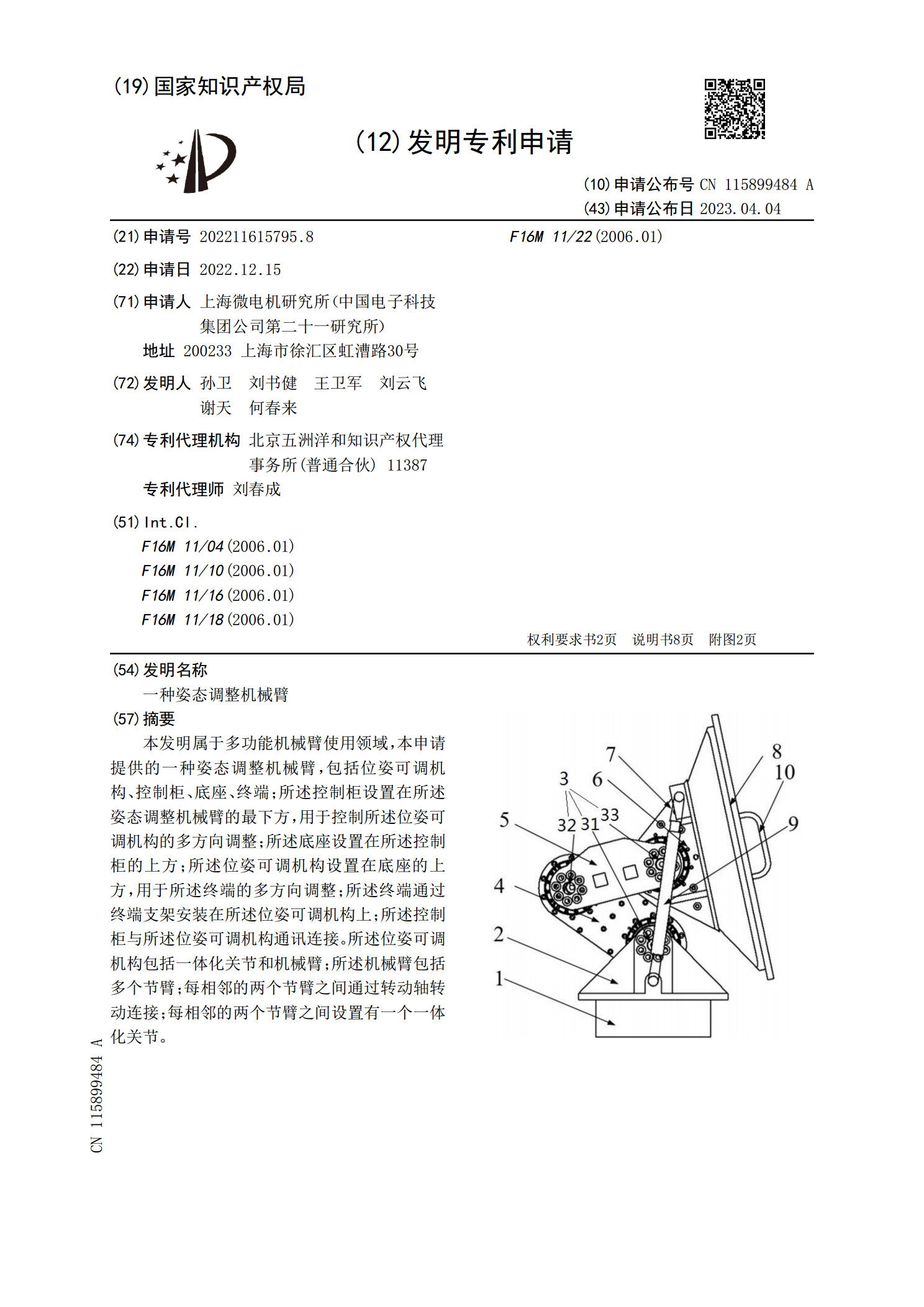
本发明属于多功能机械臂使用领域,本申请提供的一种姿态调整机械臂,包括位姿可调机构、控制柜、底座、终端;所述控制柜设置在所述姿态调整机械臂的最下方,用于控制所述位姿可调机构的多方向调整;所述底座设置在所述控制柜的上方;所述位姿可调机构设置在底座的上方,用于所述终端的多方向调整;所述终端通过终端支架安装在所述位姿可调机构上;所述控制柜与所述位姿可调机构通讯连接。所述位姿可调机构包括一体化关节和机械臂;所述机械臂包括多个节臂;每相邻的两个节臂之间通过转动轴转动连接;每相邻的两个节臂之间设置有一个一体化关节。

一种机械臂末端姿态调整方法及装置.pdf
本申请公开了一种机械臂末端姿态调整方法及装置,应用于智能机器人,所述智能机器人包括基座和机械臂,所述方法包括:在预先设定的情况下,获取所述机械臂末端在基座坐标系O
一种用于关节型机械臂姿态调整机构.pdf
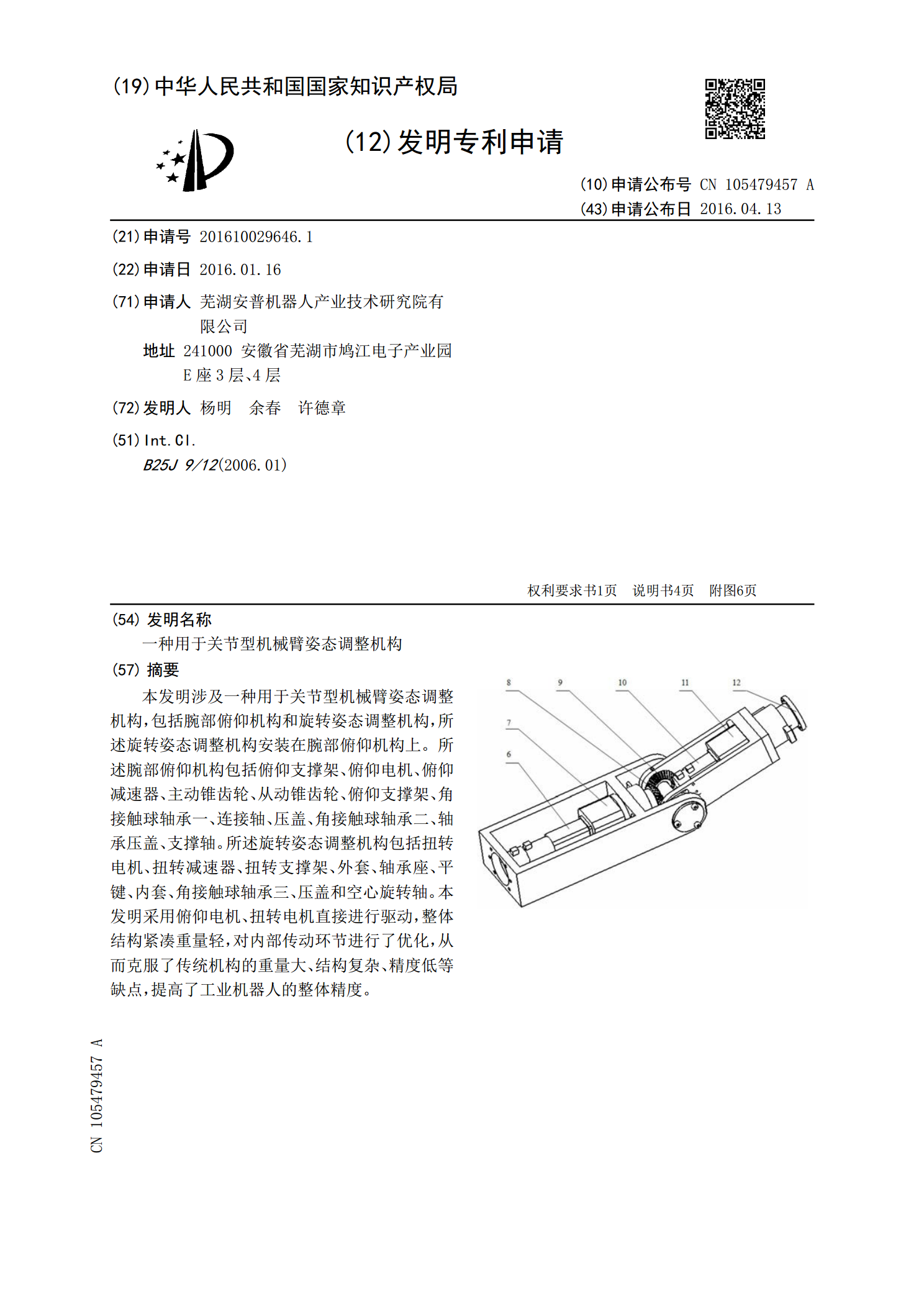
本发明涉及一种用于关节型机械臂姿态调整机构,包括腕部俯仰机构和旋转姿态调整机构,所述旋转姿态调整机构安装在腕部俯仰机构上。所述腕部俯仰机构包括俯仰支撑架、俯仰电机、俯仰减速器、主动锥齿轮、从动锥齿轮、俯仰支撑架、角接触球轴承一、连接轴、压盖、角接触球轴承二、轴承压盖、支撑轴。所述旋转姿态调整机构包括扭转电机、扭转减速器、扭转支撑架、外套、轴承座、平键、内套、角接触球轴承三、压盖和空心旋转轴。本发明采用俯仰电机、扭转电机直接进行驱动,整体结构紧凑重量轻,对内部传动环节进行了优化,从而克服了传统机构的重量大、

模块化机械臂、吊装系统及姿态调整方法.pdf
本发明提供一种模块化机械臂、吊装系统及姿态调整方法,用于解决现有技术中无法对待吊装物件的姿态进行实时调整的问题。本发明提供一种模块化机械臂,包括:安装台和基座,所述基座转动安装在所述安装台上,所述基座上设有驾驶室和控制器;吊臂和第一驱动件,所述吊臂为可伸缩结构,所述吊臂下端铰接安装在所述基座上,所述第一驱动件驱动所述吊臂翻转;承重拉索机构,所述承重拉索机构包括承重拉索、承重拉索驱动件、顶部滑轮组和承重吊钩;姿态调整机构,所述姿态调整机构包括第一姿态调整拉索、第一姿态调整驱动件、第一中部滑轮组和第一姿态调整

一种机械臂姿态速度规划控制方法.pdf
本发明涉及一种机械臂姿态速度规划控制方法,属于轨迹规划领域。本发明包括:步骤一,获取机械臂末端连杆坐标系当前姿态与目标姿态之间的旋转变换矩阵,并将其表示成欧拉角形式。步骤二,将欧拉角的各个角度乘以阻尼系数,得到机械臂末端连杆坐标系下期望旋转速度,然后通过机器人正向运动学矩阵,将其转换到机械臂基坐标系下。步骤三,按按照欧拉角的旋转次序依次对绕基坐标系各个轴的旋转进行速度控制,三个控制周期后重复上述两个步骤,直到机械臂末端到达目标姿态。