
机器人、机器人控制方法、装置、存储介质和控制器.pdf

醉香****mm

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机器人、机器人控制方法、装置、存储介质和控制器.pdf
本申请公开了机器人、机器人控制方法、装置、存储介质和控制器,涉及人工智能技术领域。该机器人包括机器人主体,还包括传感器、第一显示屏、第二显示屏和控制器,其中:所述第一显示屏的尺寸小于所述第二显示屏的尺寸;所述传感器用于检测目标对象与机器人的距离;所述控制器用于根据目标对象与机器人的距离,以及预设的距离区间与内容类型的对应关系,控制第一显示屏和/或第二显示屏显示相应类型的内容。本申请实施例提供的机器人具有尺寸不同的两个屏幕,可以根据目标对象和机器人的距离控制适合的屏幕显示相应类型的内容。
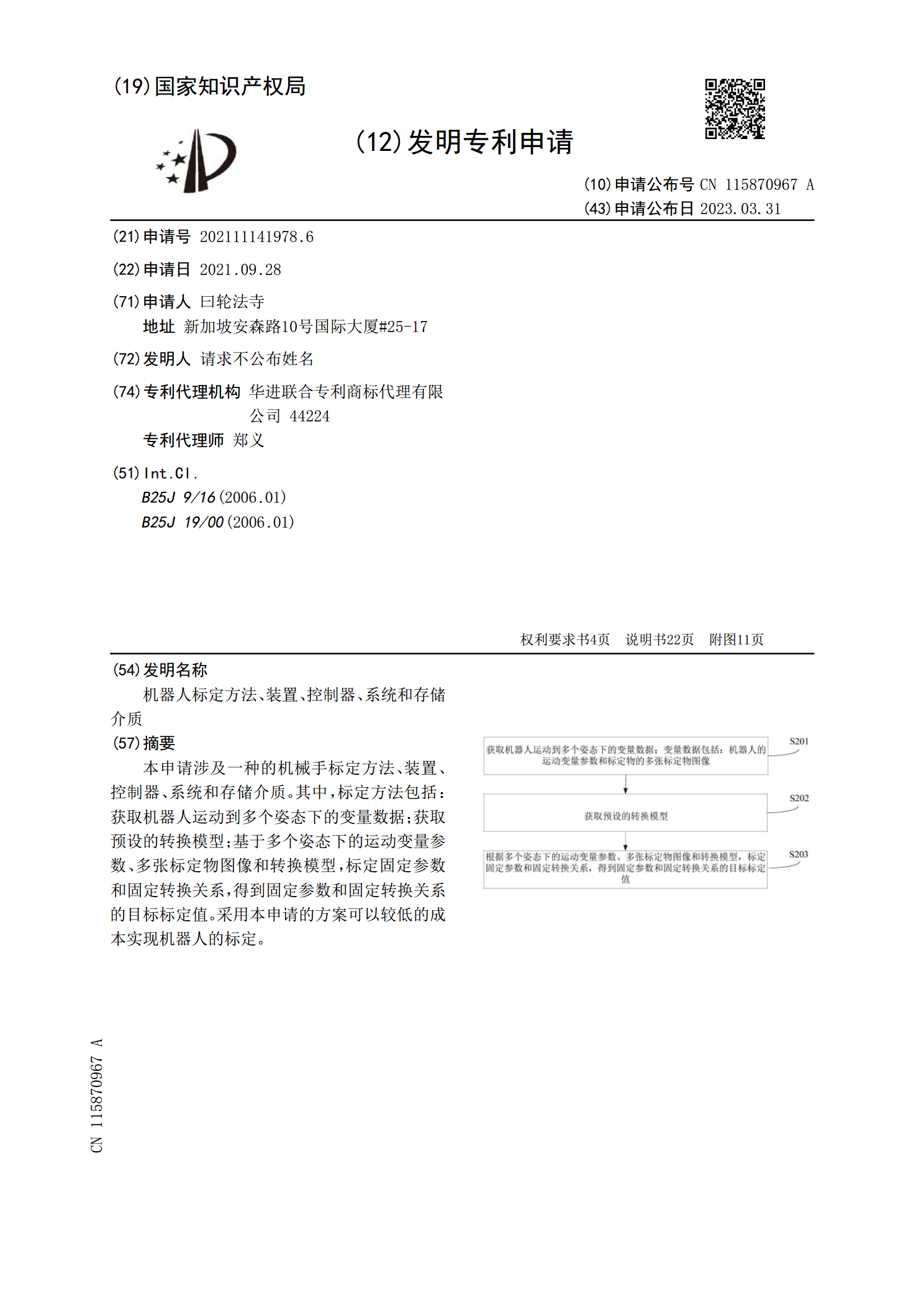
机器人标定方法、装置、控制器、系统和存储介质.pdf
本申请涉及一种的机械手标定方法、装置、控制器、系统和存储介质。其中,标定方法包括:获取机器人运动到多个姿态下的变量数据;获取预设的转换模型;基于多个姿态下的运动变量参数、多张标定物图像和转换模型,标定固定参数和固定转换关系,得到固定参数和固定转换关系的目标标定值。采用本申请的方案可以较低的成本实现机器人的标定。
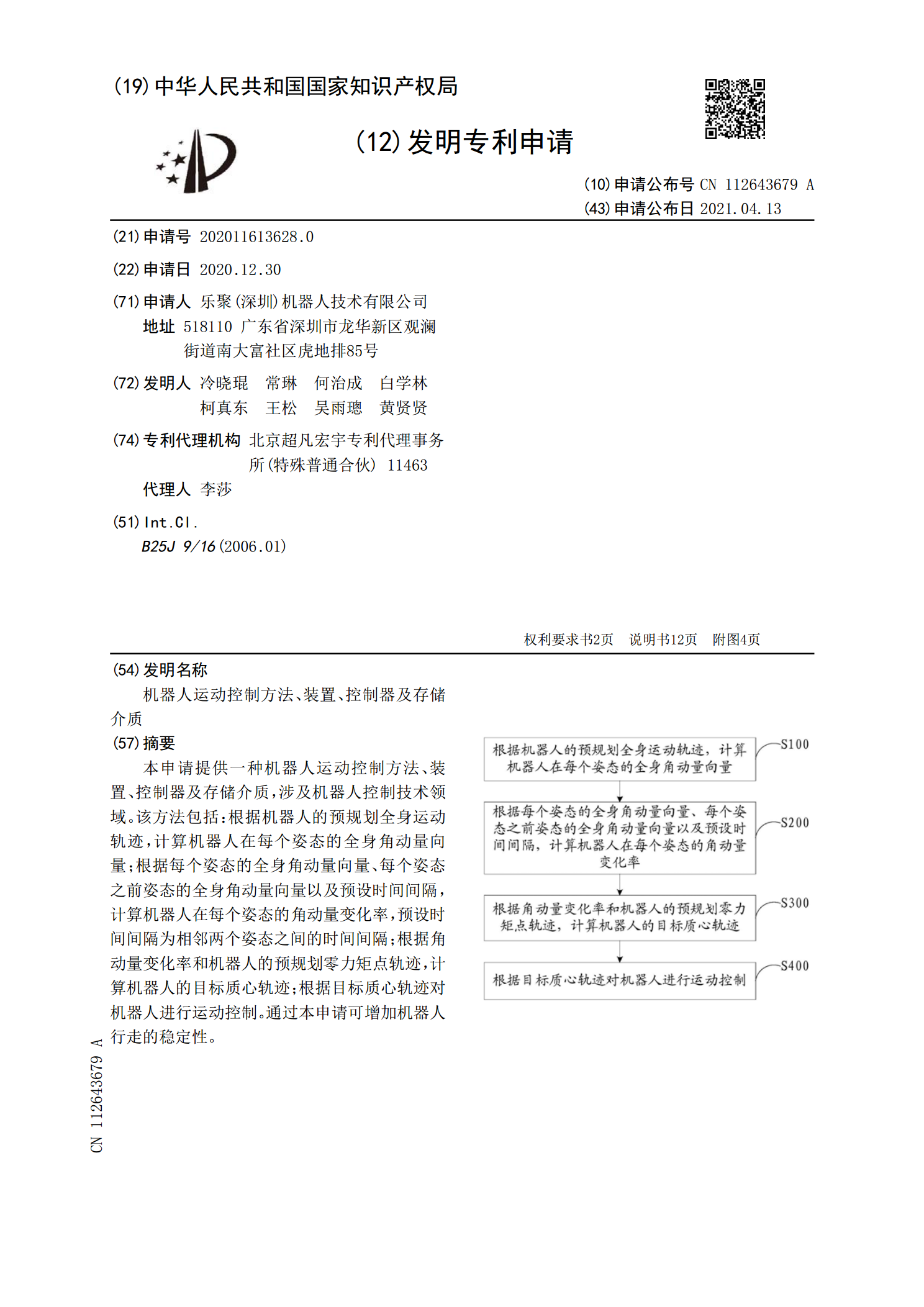
机器人运动控制方法、装置、控制器及存储介质.pdf
本申请提供一种机器人运动控制方法、装置、控制器及存储介质,涉及机器人控制技术领域。该方法包括:根据机器人的预规划全身运动轨迹,计算机器人在每个姿态的全身角动量向量;根据每个姿态的全身角动量向量、每个姿态之前姿态的全身角动量向量以及预设时间间隔,计算机器人在每个姿态的角动量变化率,预设时间间隔为相邻两个姿态之间的时间间隔;根据角动量变化率和机器人的预规划零力矩点轨迹,计算机器人的目标质心轨迹;根据目标质心轨迹对机器人进行运动控制。通过本申请可增加机器人行走的稳定性。
机器人的爬楼控制方法、装置、存储介质和机器人.pdf
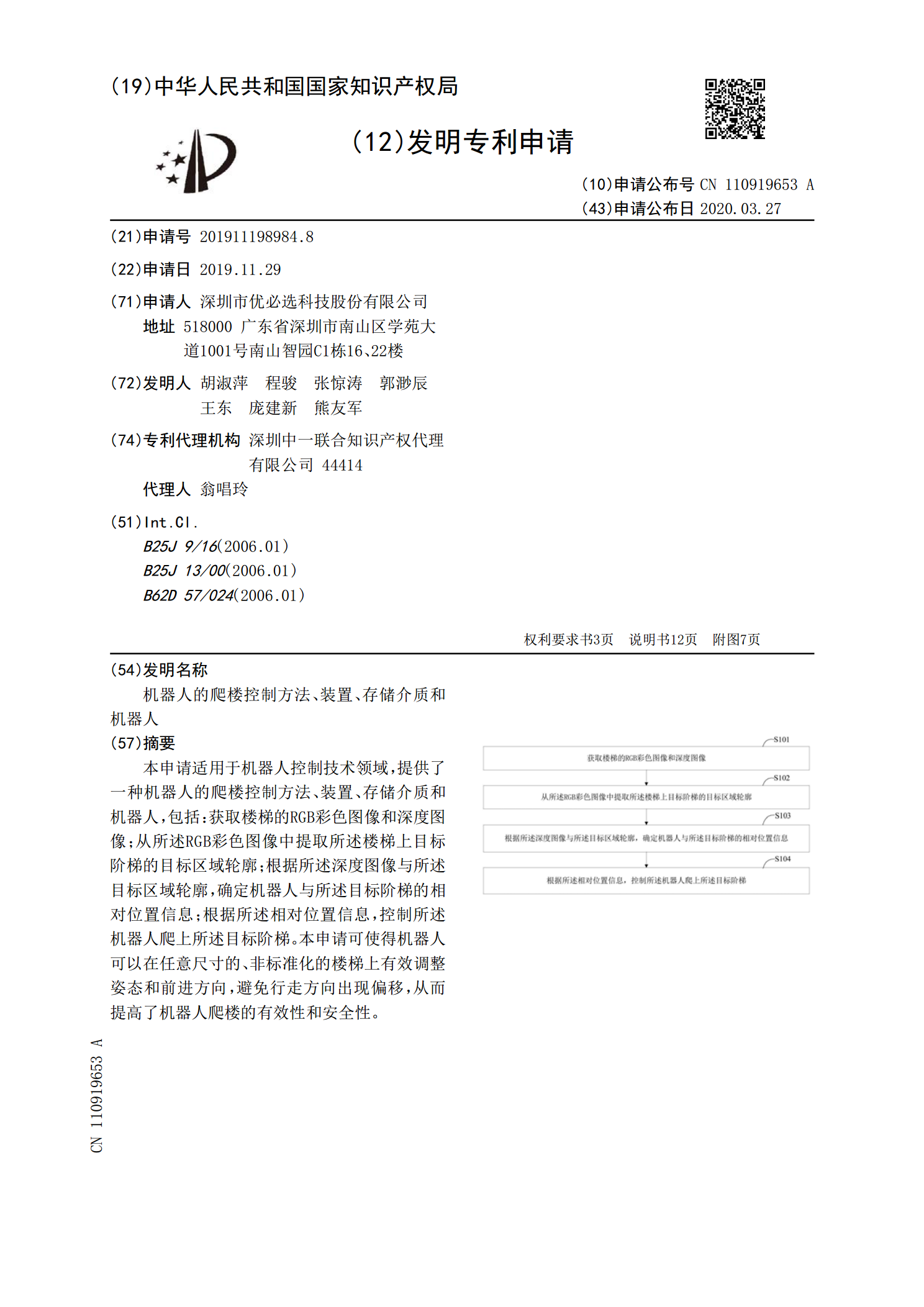
本申请适用于机器人控制技术领域,提供了一种机器人的爬楼控制方法、装置、存储介质和机器人,包括:获取楼梯的RGB彩色图像和深度图像;从所述RGB彩色图像中提取所述楼梯上目标阶梯的目标区域轮廓;根据所述深度图像与所述目标区域轮廓,确定机器人与所述目标阶梯的相对位置信息;根据所述相对位置信息,控制所述机器人爬上所述目标阶梯。本申请可使得机器人可以在任意尺寸的、非标准化的楼梯上有效调整姿态和前进方向,避免行走方向出现偏移,从而提高了机器人爬楼的有效性和安全性。

机器人及其控制方法、装置和存储介质.pdf
本申请公开了一种机器人及其控制方法。其中,该机器人包括:主体部;该机器人还包括:第一音频输出装置和第二音频输出装置,所述第一音频输出装置和所述第二音频输出装置设置于所述主体部上的不同区域;设置于主体部上的交互对象定位装置,用于定位机器人的交互对象;控制装置,用于根据交互对象定位装置的定位结果,分别对第一音频输出装置和第二音频输出装置的音频输出进行控制。该机器人使用多个音频输出装置输出音频,从而可以使得交互对象能够准确并清楚地听到机器人“说话”。