
机器人的爬楼控制方法、装置、存储介质和机器人.pdf

小宏****aa

1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人的爬楼控制方法、装置、存储介质和机器人.pdf
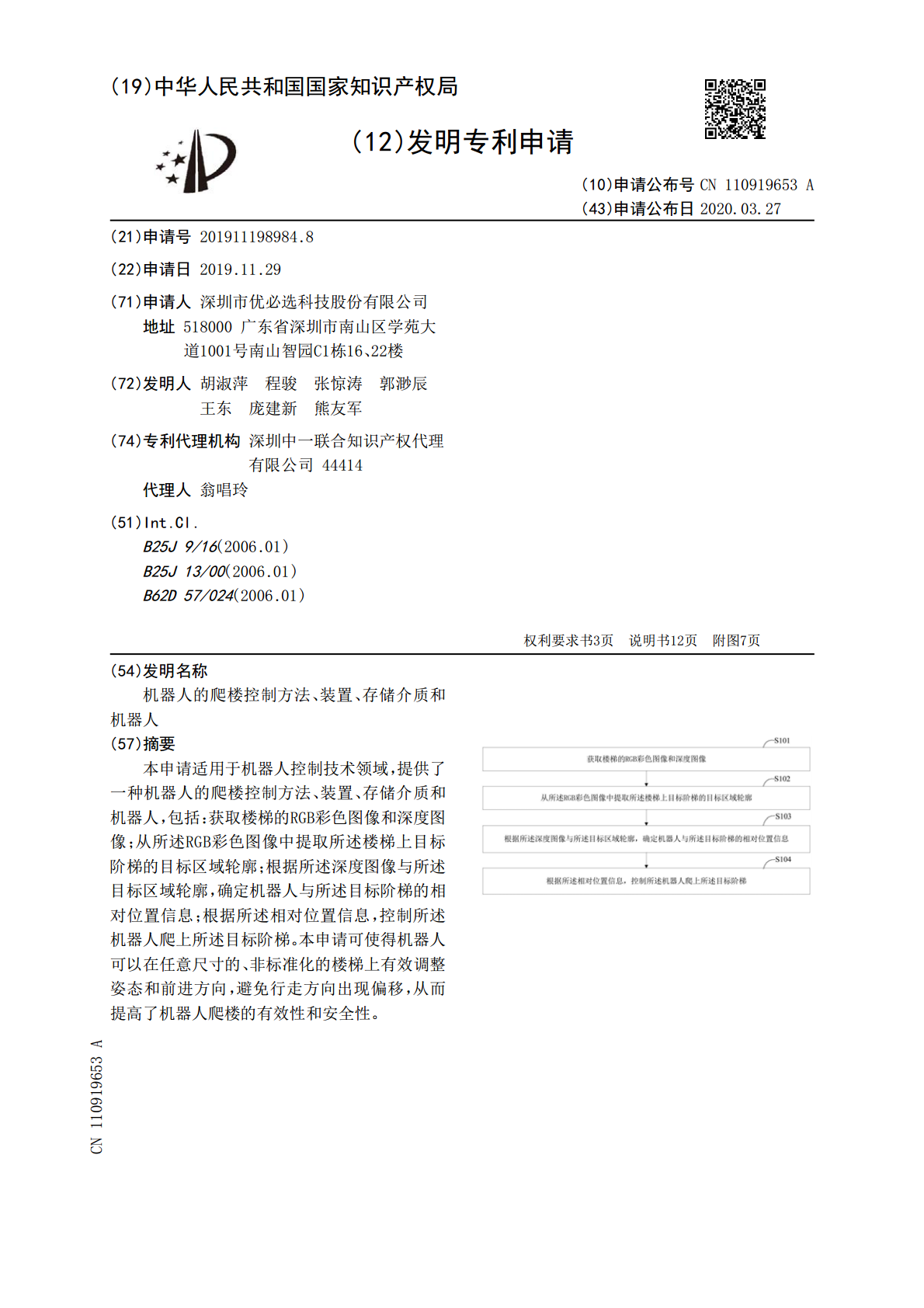
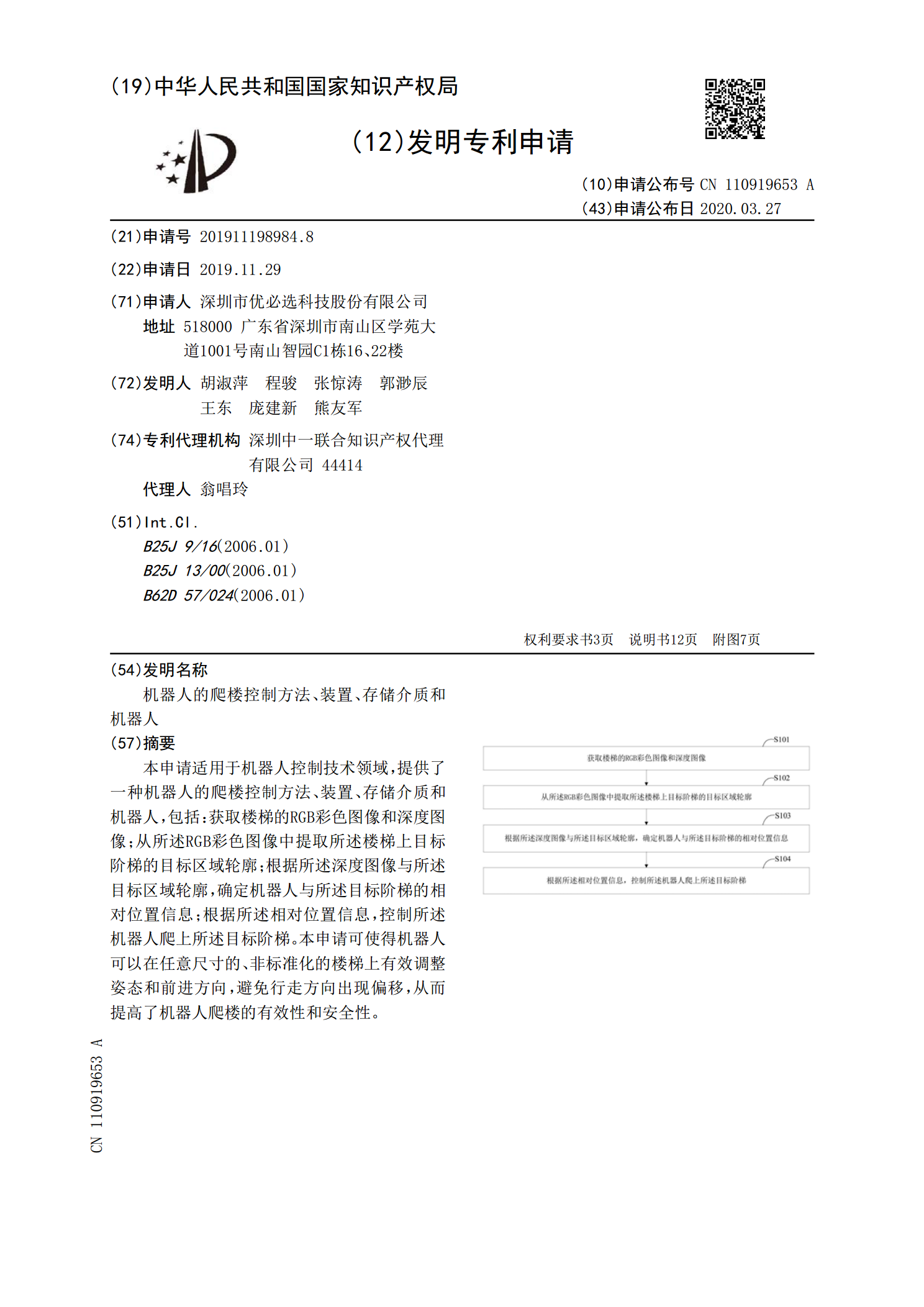
本申请适用于机器人控制技术领域,提供了一种机器人的爬楼控制方法、装置、存储介质和机器人,包括:获取楼梯的RGB彩色图像和深度图像;从所述RGB彩色图像中提取所述楼梯上目标阶梯的目标区域轮廓;根据所述深度图像与所述目标区域轮廓,确定机器人与所述目标阶梯的相对位置信息;根据所述相对位置信息,控制所述机器人爬上所述目标阶梯。本申请可使得机器人可以在任意尺寸的、非标准化的楼梯上有效调整姿态和前进方向,避免行走方向出现偏移,从而提高了机器人爬楼的有效性和安全性。

机器人及其控制方法、装置和存储介质.pdf
本申请公开了一种机器人及其控制方法。其中,该机器人包括:主体部;该机器人还包括:第一音频输出装置和第二音频输出装置,所述第一音频输出装置和所述第二音频输出装置设置于所述主体部上的不同区域;设置于主体部上的交互对象定位装置,用于定位机器人的交互对象;控制装置,用于根据交互对象定位装置的定位结果,分别对第一音频输出装置和第二音频输出装置的音频输出进行控制。该机器人使用多个音频输出装置输出音频,从而可以使得交互对象能够准确并清楚地听到机器人“说话”。

机器人、机器人控制方法、装置、存储介质和控制器.pdf
本申请公开了机器人、机器人控制方法、装置、存储介质和控制器,涉及人工智能技术领域。该机器人包括机器人主体,还包括传感器、第一显示屏、第二显示屏和控制器,其中:所述第一显示屏的尺寸小于所述第二显示屏的尺寸;所述传感器用于检测目标对象与机器人的距离;所述控制器用于根据目标对象与机器人的距离,以及预设的距离区间与内容类型的对应关系,控制第一显示屏和/或第二显示屏显示相应类型的内容。本申请实施例提供的机器人具有尺寸不同的两个屏幕,可以根据目标对象和机器人的距离控制适合的屏幕显示相应类型的内容。

机器人控制方法、装置、机器人和存储介质.pdf
本申请实施例公开了一种机器人控制方法、装置、机器人和存储介质,涉及控制领域。该方法包括:在机器人所在区域的电梯门开启后,根据预设路径,控制机器人移动且自转,以采集轿厢内部的至少两个视场角度的目标图像;依次对各所述目标图像进行人物标定和追踪,并根据标定和追踪结果,确定所述轿厢中的目标乘梯人数;根据所述目标乘梯人数,对所述机器人进行乘梯控制。本申请提高了确定结果准确度,同时避免了机器人等待时间过长对机器人,同时减少了无效乘梯过多对电梯的作业效率的影响,从而提高了机器人和电梯的作业效率。
机器人的控制方法、装置、机器人设备和存储介质.pdf
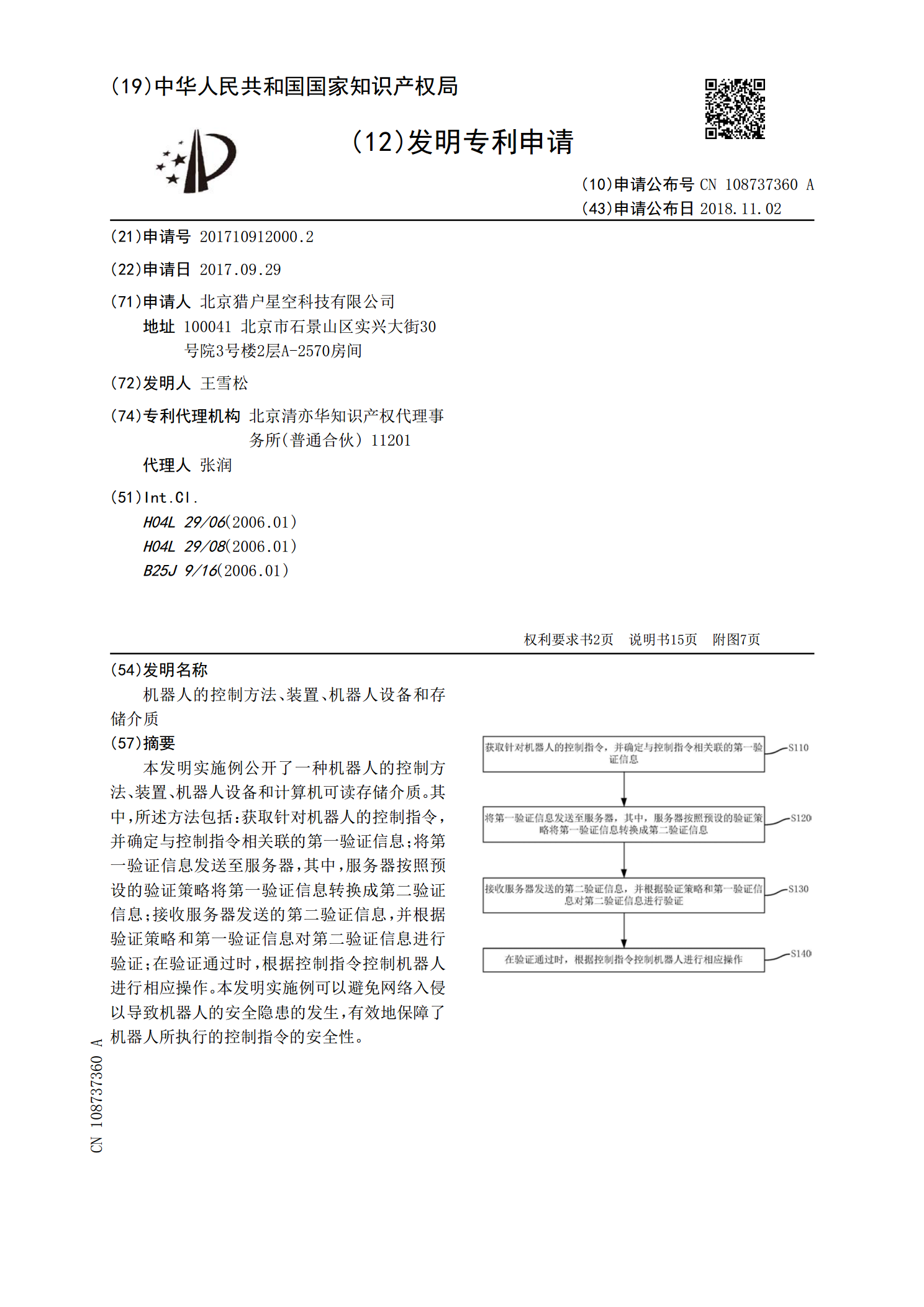
本发明实施例公开了一种机器人的控制方法、装置、机器人设备和计算机可读存储介质。其中,所述方法包括:获取针对机器人的控制指令,并确定与控制指令相关联的第一验证信息;将第一验证信息发送至服务器,其中,服务器按照预设的验证策略将第一验证信息转换成第二验证信息;接收服务器发送的第二验证信息,并根据验证策略和第一验证信息对第二验证信息进行验证;在验证通过时,根据控制指令控制机器人进行相应操作。本发明实施例可以避免网络入侵以导致机器人的安全隐患的发生,有效地保障了机器人所执行的控制指令的安全性。