
机器人运动控制方法、装置、控制器及存储介质.pdf

新槐****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人运动控制方法、装置、控制器及存储介质.pdf
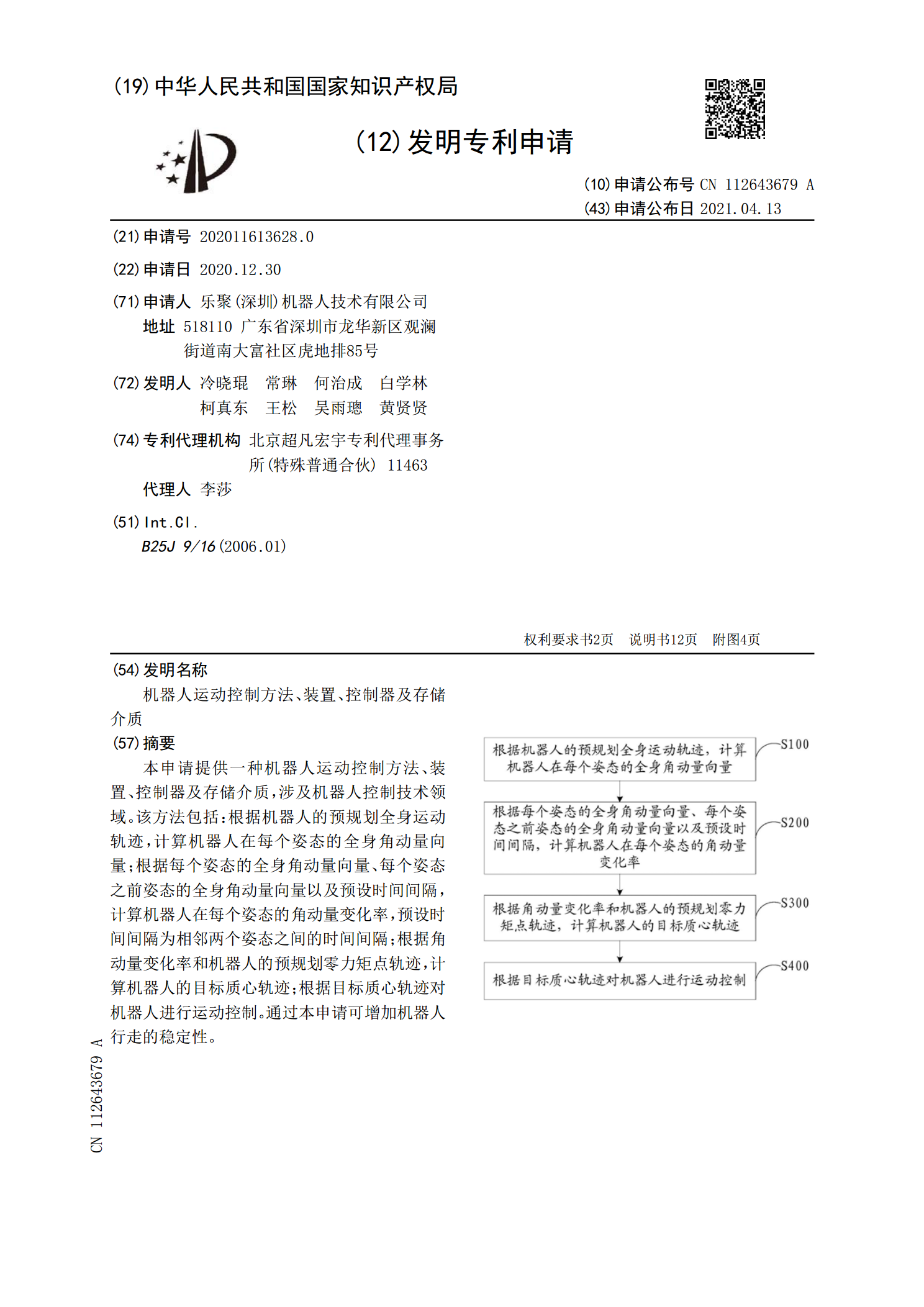
本申请提供一种机器人运动控制方法、装置、控制器及存储介质,涉及机器人控制技术领域。该方法包括:根据机器人的预规划全身运动轨迹,计算机器人在每个姿态的全身角动量向量;根据每个姿态的全身角动量向量、每个姿态之前姿态的全身角动量向量以及预设时间间隔,计算机器人在每个姿态的角动量变化率,预设时间间隔为相邻两个姿态之间的时间间隔;根据角动量变化率和机器人的预规划零力矩点轨迹,计算机器人的目标质心轨迹;根据目标质心轨迹对机器人进行运动控制。通过本申请可增加机器人行走的稳定性。
机器人运动保护方法、装置、控制器及存储介质.pdf
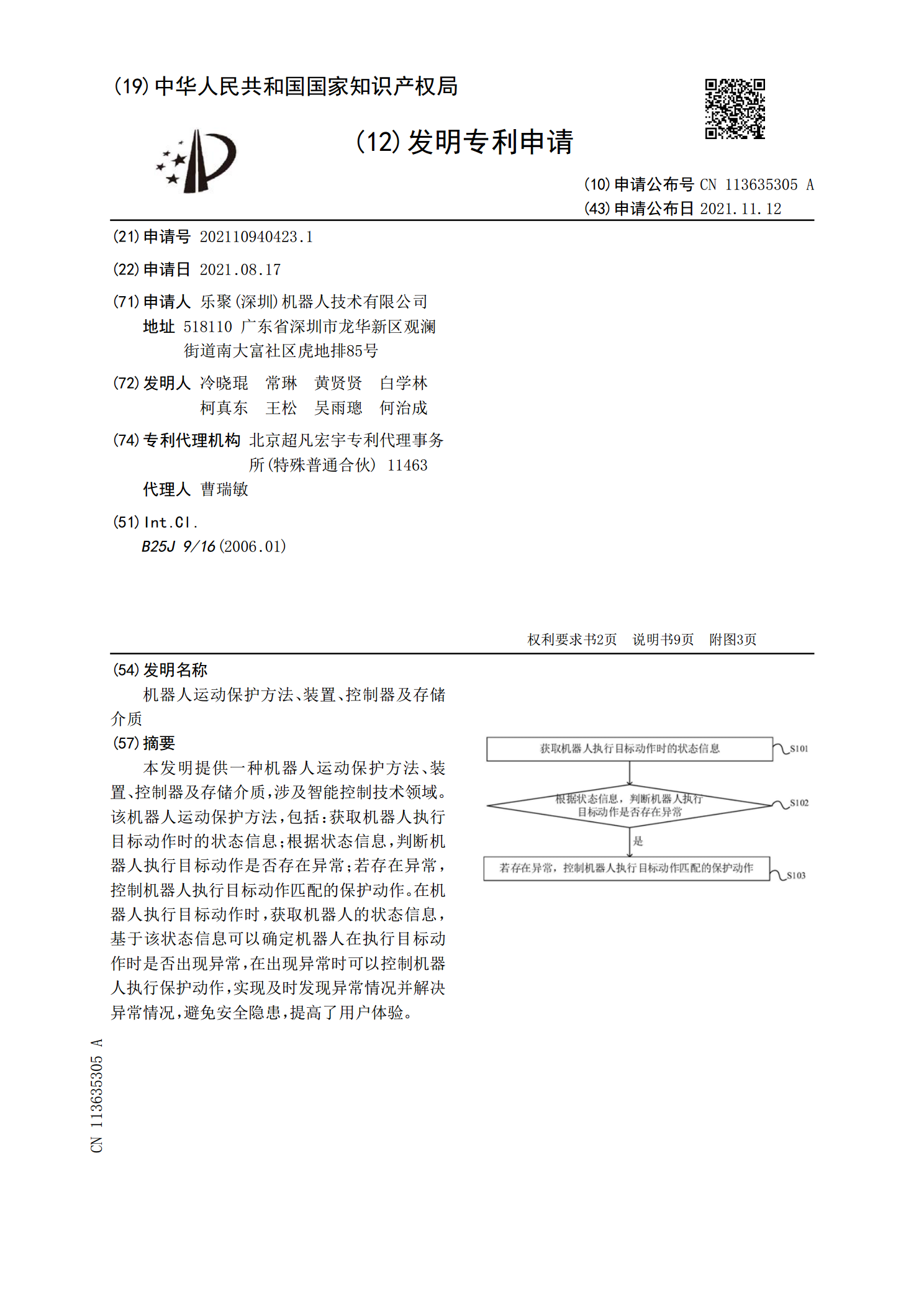
本发明提供一种机器人运动保护方法、装置、控制器及存储介质,涉及智能控制技术领域。该机器人运动保护方法,包括:获取机器人执行目标动作时的状态信息;根据状态信息,判断机器人执行目标动作是否存在异常;若存在异常,控制机器人执行目标动作匹配的保护动作。在机器人执行目标动作时,获取机器人的状态信息,基于该状态信息可以确定机器人在执行目标动作时是否出现异常,在出现异常时可以控制机器人执行保护动作,实现及时发现异常情况并解决异常情况,避免安全隐患,提高了用户体验。
机器人运动轨迹估计方法、装置、控制器及存储介质.pdf
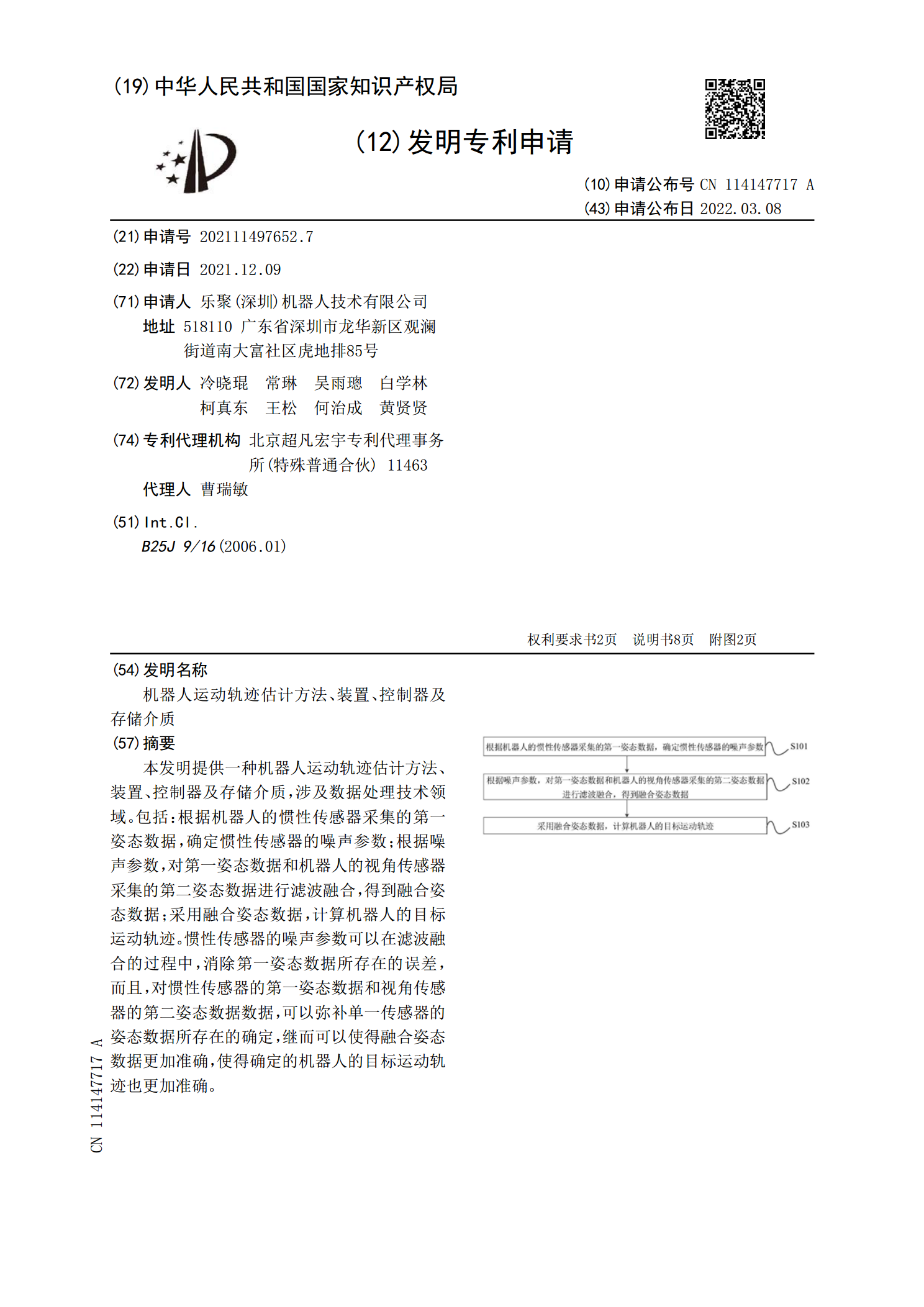
本发明提供一种机器人运动轨迹估计方法、装置、控制器及存储介质,涉及数据处理技术领域。包括:根据机器人的惯性传感器采集的第一姿态数据,确定惯性传感器的噪声参数;根据噪声参数,对第一姿态数据和机器人的视角传感器采集的第二姿态数据进行滤波融合,得到融合姿态数据;采用融合姿态数据,计算机器人的目标运动轨迹。惯性传感器的噪声参数可以在滤波融合的过程中,消除第一姿态数据所存在的误差,而且,对惯性传感器的第一姿态数据和视角传感器的第二姿态数据数据,可以弥补单一传感器的姿态数据所存在的确定,继而可以使得融合姿态数据更加准
机器人运动控制方法、装置及存储介质.pdf
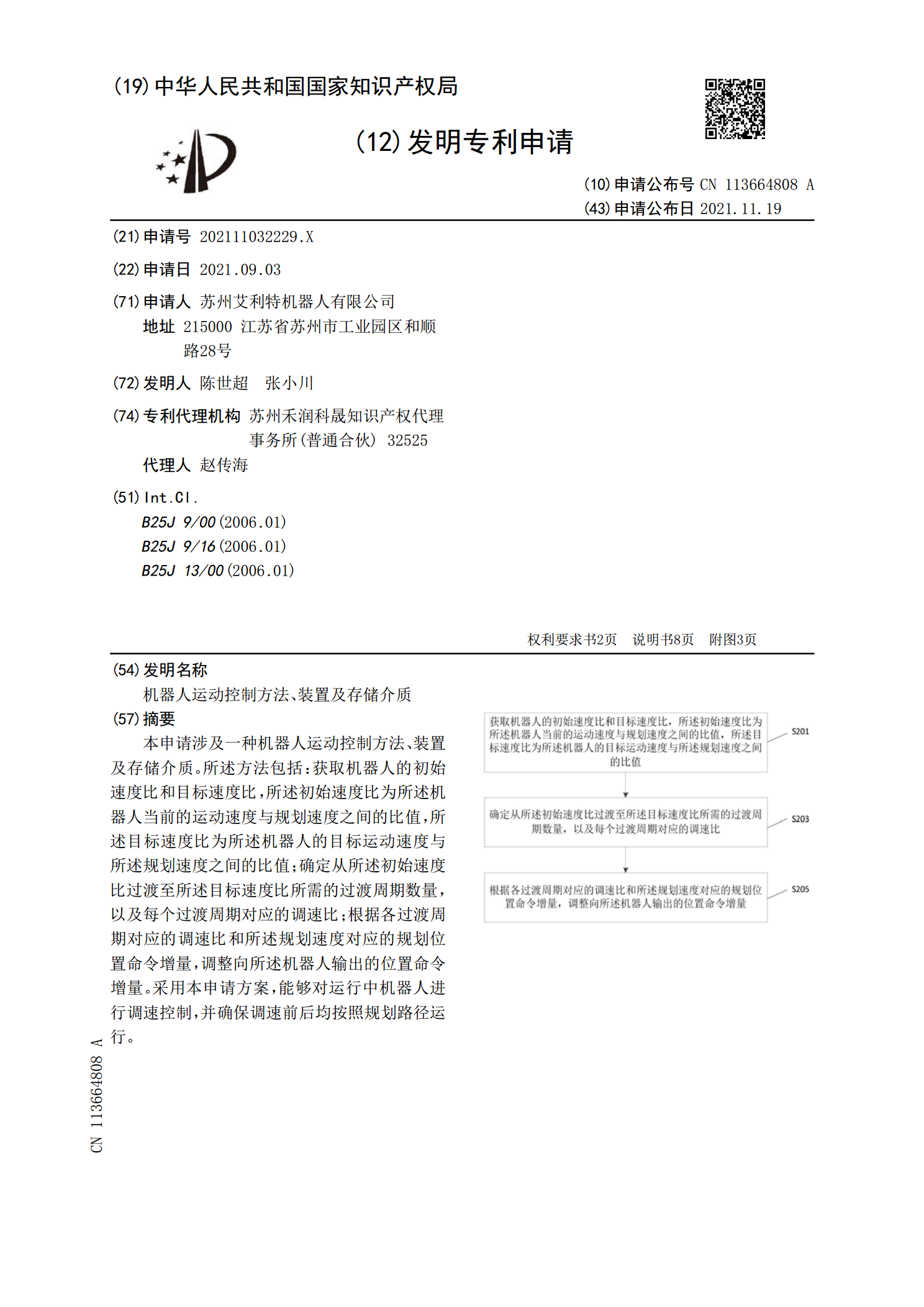
本申请涉及一种机器人运动控制方法、装置及存储介质。所述方法包括:获取机器人的初始速度比和目标速度比,所述初始速度比为所述机器人当前的运动速度与规划速度之间的比值,所述目标速度比为所述机器人的目标运动速度与所述规划速度之间的比值;确定从所述初始速度比过渡至所述目标速度比所需的过渡周期数量,以及每个过渡周期对应的调速比;根据各过渡周期对应的调速比和所述规划速度对应的规划位置命令增量,调整向所述机器人输出的位置命令增量。采用本申请方案,能够对运行中机器人进行调速控制,并确保调速前后均按照规划路径运行。

运动控制方法、装置、机器人及存储介质.pdf
本发明公开了一种运动控制方法、装置、机器人及存储介质,该方法包括:确定目标设备运动时在当前单位时间内左轮和右轮的运动速度偏差,获取所述目标设备上陀螺仪当前单位时间内的偏航角速度,根据所述运动速度偏差和所述偏航角速度确定所述左轮在当前单位时间内的实际速度,根据所述实际速度控制所述目标设备的当前运动状态,通过上述技术方案,解决了现有技术中单纯的采用左右轮编码器或者陀螺仪导致的目标设备行进过程中,无法保持直线行进的问题,保证了目标设备在打滑状态下依然可以进行直线运动,同时减小了误差。