
机器人标定方法、装置、控制器、系统和存储介质.pdf

是你****元呀

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共38页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人标定方法、装置、控制器、系统和存储介质.pdf
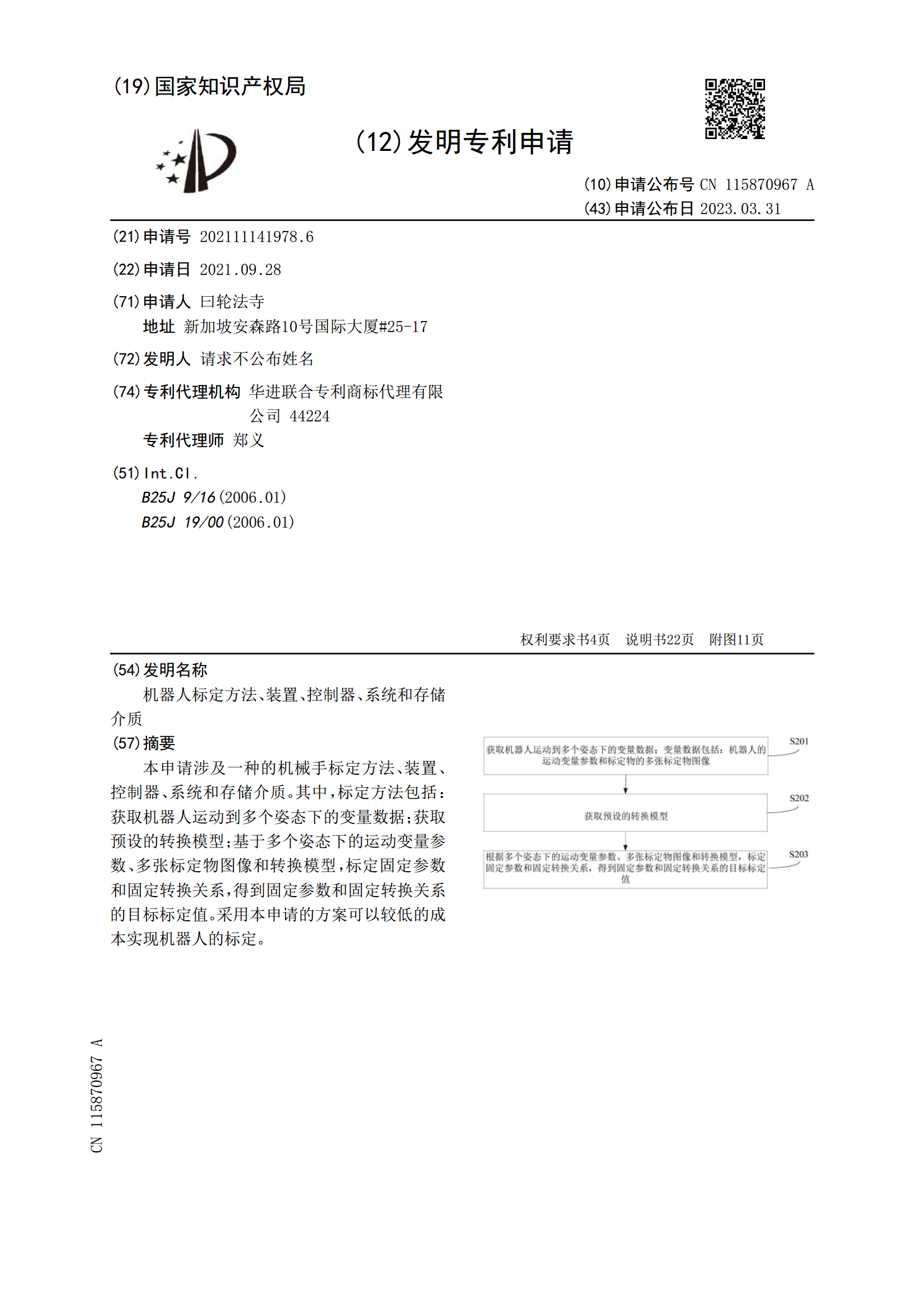
本申请涉及一种的机械手标定方法、装置、控制器、系统和存储介质。其中,标定方法包括:获取机器人运动到多个姿态下的变量数据;获取预设的转换模型;基于多个姿态下的运动变量参数、多张标定物图像和转换模型,标定固定参数和固定转换关系,得到固定参数和固定转换关系的目标标定值。采用本申请的方案可以较低的成本实现机器人的标定。
目标定位方法、装置、监控系统和存储介质.pdf
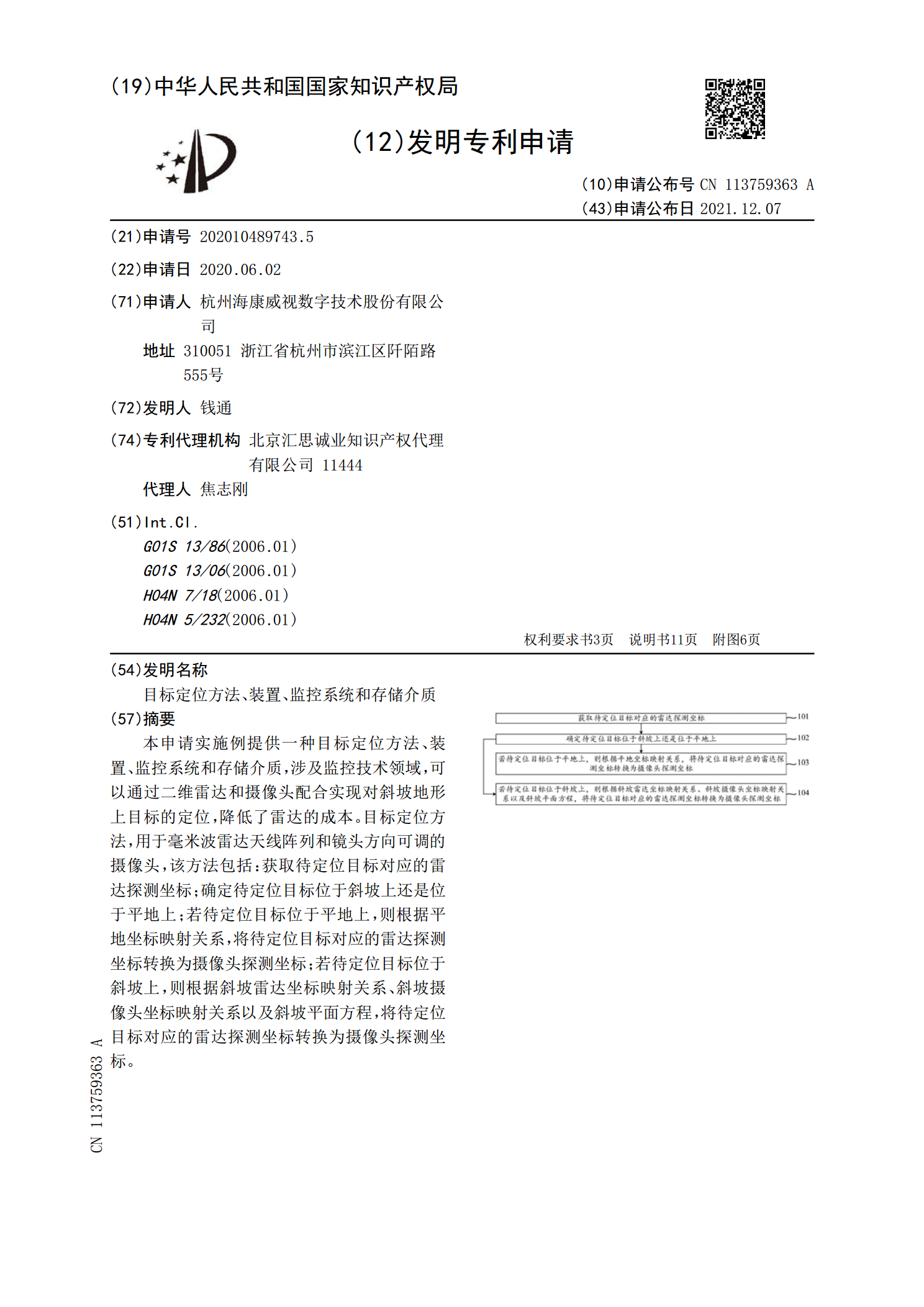
本申请实施例提供一种目标定位方法、装置、监控系统和存储介质,涉及监控技术领域,可以通过二维雷达和摄像头配合实现对斜坡地形上目标的定位,降低了雷达的成本。目标定位方法,用于毫米波雷达天线阵列和镜头方向可调的摄像头,该方法包括:获取待定位目标对应的雷达探测坐标;确定待定位目标位于斜坡上还是位于平地上;若待定位目标位于平地上,则根据平地坐标映射关系,将待定位目标对应的雷达探测坐标转换为摄像头探测坐标;若待定位目标位于斜坡上,则根据斜坡雷达坐标映射关系、斜坡摄像头坐标映射关系以及斜坡平面方程,将待定位目标对应的雷

机器人、机器人控制方法、装置、存储介质和控制器.pdf
本申请公开了机器人、机器人控制方法、装置、存储介质和控制器,涉及人工智能技术领域。该机器人包括机器人主体,还包括传感器、第一显示屏、第二显示屏和控制器,其中:所述第一显示屏的尺寸小于所述第二显示屏的尺寸;所述传感器用于检测目标对象与机器人的距离;所述控制器用于根据目标对象与机器人的距离,以及预设的距离区间与内容类型的对应关系,控制第一显示屏和/或第二显示屏显示相应类型的内容。本申请实施例提供的机器人具有尺寸不同的两个屏幕,可以根据目标对象和机器人的距离控制适合的屏幕显示相应类型的内容。
环视系统自动标定方法、汽车、标定装置及存储介质.pdf
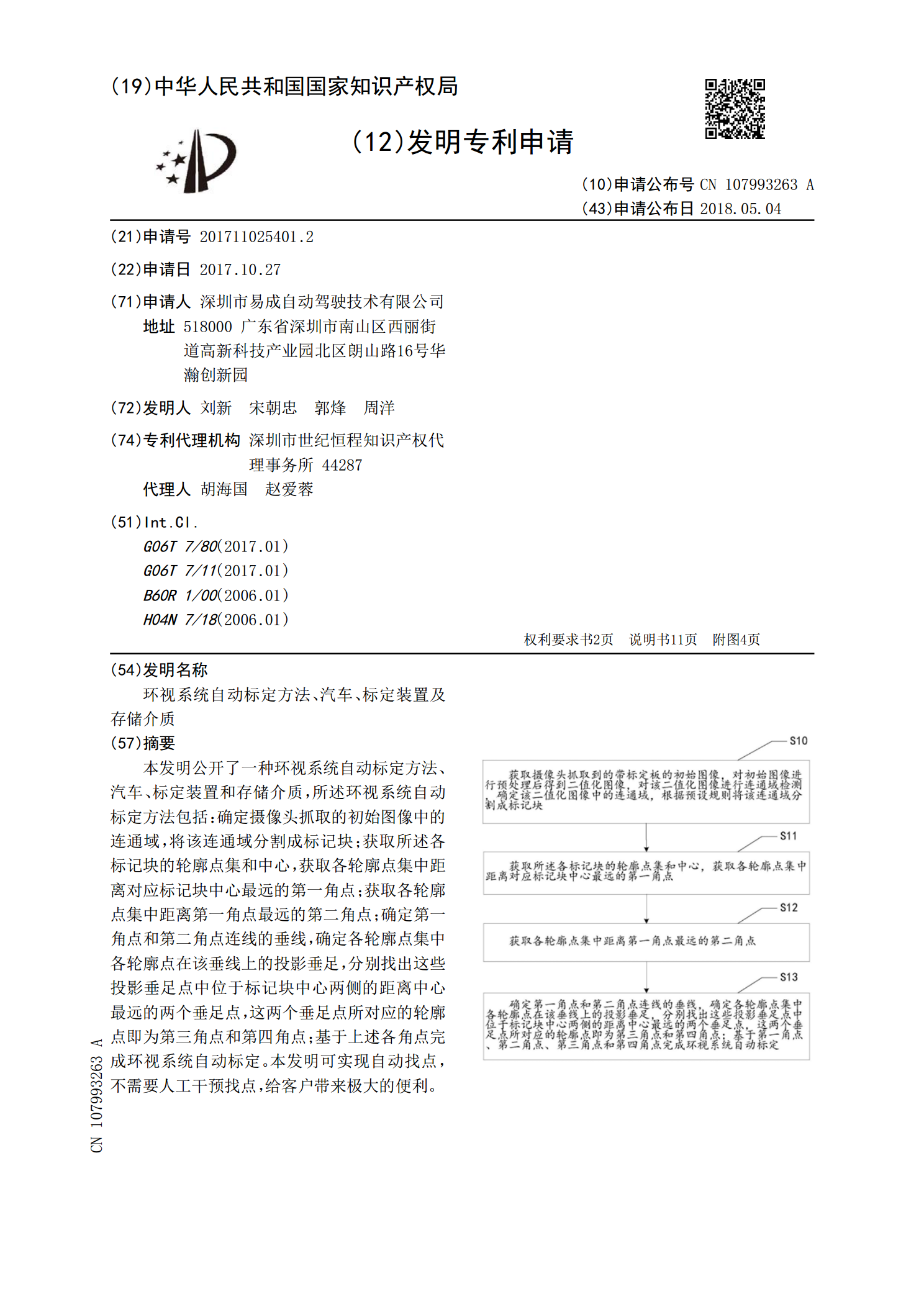
本发明公开了一种环视系统自动标定方法、汽车、标定装置和存储介质,所述环视系统自动标定方法包括:确定摄像头抓取的初始图像中的连通域,将该连通域分割成标记块;获取所述各标记块的轮廓点集和中心,获取各轮廓点集中距离对应标记块中心最远的第一角点;获取各轮廓点集中距离第一角点最远的第二角点;确定第一角点和第二角点连线的垂线,确定各轮廓点集中各轮廓点在该垂线上的投影垂足,分别找出这些投影垂足点中位于标记块中心两侧的距离中心最远的两个垂足点,这两个垂足点所对应的轮廓点即为第三角点和第四角点;基于上述各角点完成环视系统自
车用空调的标定方法、系统、存储介质和电子装置.pdf
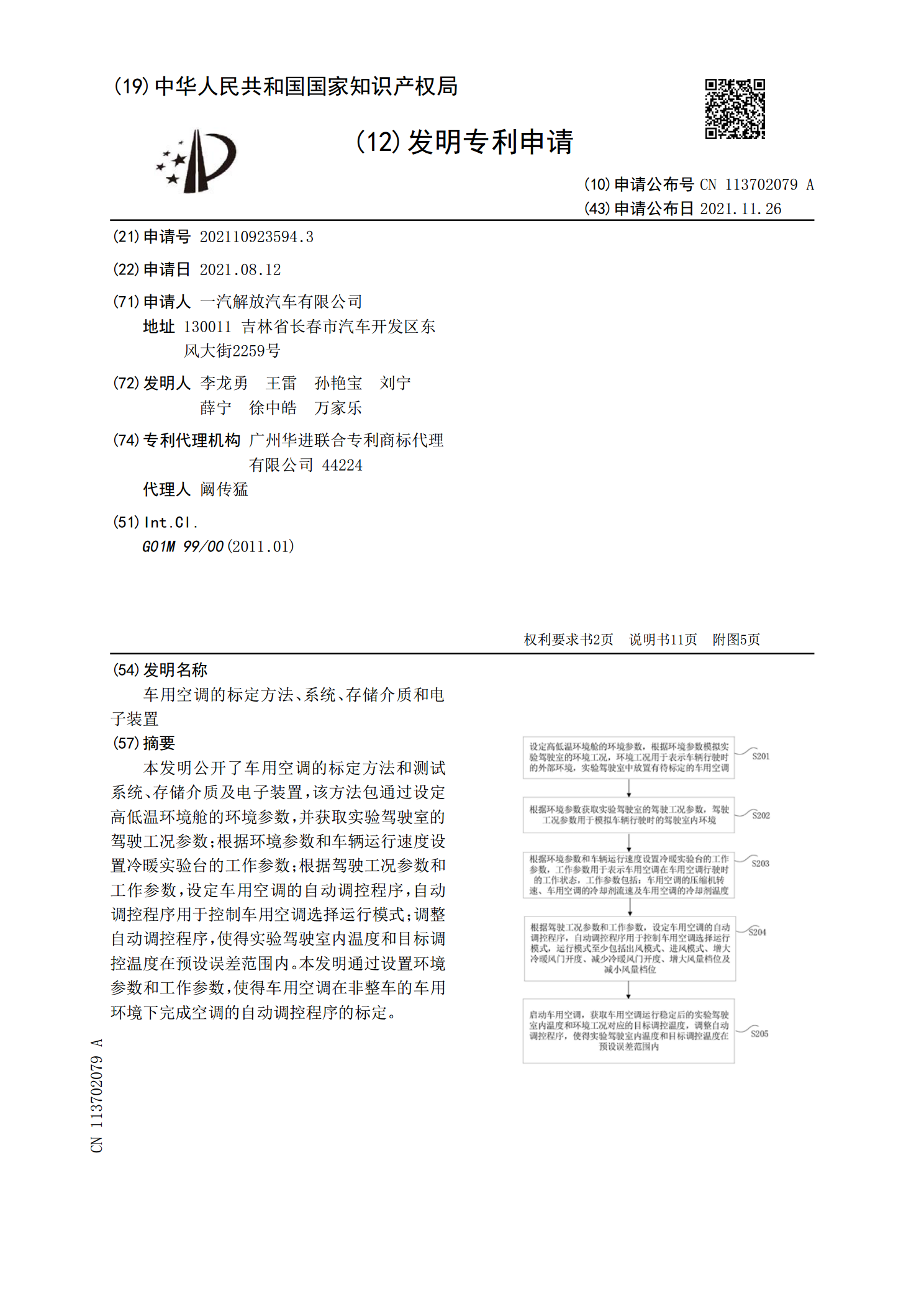
本发明公开了车用空调的标定方法和测试系统、存储介质及电子装置,该方法包通过设定高低温环境舱的环境参数,并获取实验驾驶室的驾驶工况参数;根据环境参数和车辆运行速度设置冷暖实验台的工作参数;根据驾驶工况参数和工作参数,设定车用空调的自动调控程序,自动调控程序用于控制车用空调选择运行模式;调整自动调控程序,使得实验驾驶室内温度和目标调控温度在预设误差范围内。本发明通过设置环境参数和工作参数,使得车用空调在非整车的车用环境下完成空调的自动调控程序的标定。