
一种确定车辆周围物体距离的方法、装置及系统.pdf

玉军****la


1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种确定车辆周围物体距离的方法、装置及系统.pdf
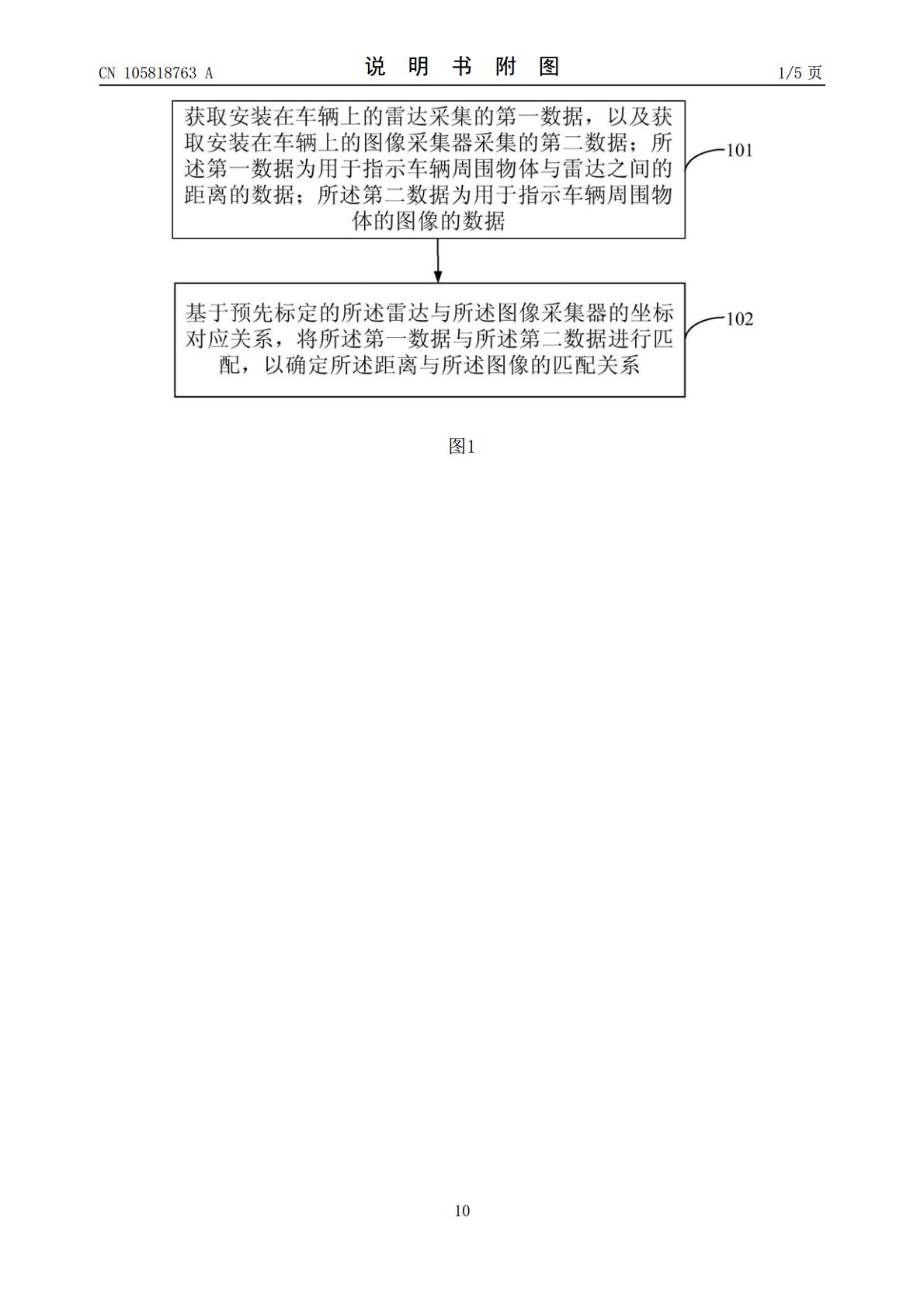
本发明提供一种确定车辆周围物体距离的方法、装置及系统,所述方法包括:获取安装在车辆上的雷达采集的第一数据,以及获取安装在车辆上的图像采集器采集的第二数据;第一数据为用于指示车辆周围物体与雷达之间的距离的数据;第二数据为用于指示车辆周围物体的图像的数据;基于预先标定的雷达与图像采集器的坐标对应关系,将第一数据与第二数据进行匹配,以确定所述距离与所述图像的匹配关系。本发明通过标定雷达与图像采集器的坐标对应关系,从而可将雷达采集的车辆周围物体的准确距离信息与图像采集器采集的车辆周围物体的图像信息进行匹配,解决了

一种车辆与障碍物之间距离确定方法及装置.pdf
本发明提供了一种车辆与障碍物之间距离确定方法及装置,所述方法包括:在障碍物进入车辆雷达盲区前,确定所述障碍物朝向所述车辆的移动速度;当所述障碍物进入所述车辆雷达探测盲区时,记录所述车辆与所述障碍物之间的初始距离;确定所述车辆,朝向所述障碍物的第一移动距离;根据所述障碍物朝向所述车辆的移动速度,确定所述障碍物朝向所述车辆的第二移动距离;根据所述初始距离、所述第一移动距离、所述第二移动距离,确定在所述障碍物进入所述车辆雷达探测盲区后,所述车辆与所述障碍物之间的距离。本发明所述的车辆与障碍物之间距离确定方法,能
车辆的跟停距离确定方法及装置.pdf
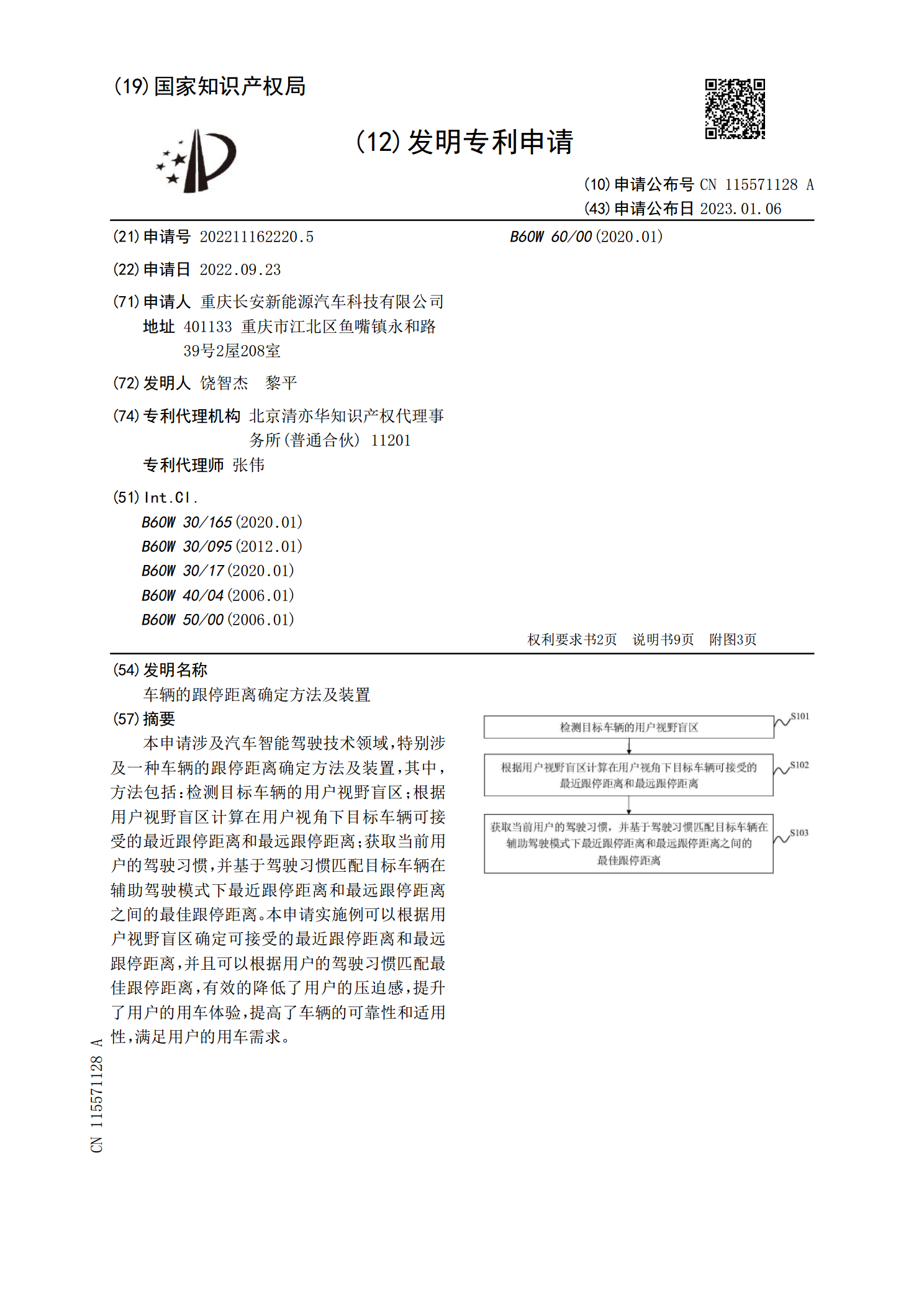
本申请涉及汽车智能驾驶技术领域,特别涉及一种车辆的跟停距离确定方法及装置,其中,方法包括:检测目标车辆的用户视野盲区;根据用户视野盲区计算在用户视角下目标车辆可接受的最近跟停距离和最远跟停距离;获取当前用户的驾驶习惯,并基于驾驶习惯匹配目标车辆在辅助驾驶模式下最近跟停距离和最远跟停距离之间的最佳跟停距离。本申请实施例可以根据用户视野盲区确定可接受的最近跟停距离和最远跟停距离,并且可以根据用户的驾驶习惯匹配最佳跟停距离,有效的降低了用户的压迫感,提升了用户的用车体验,提高了车辆的可靠性和适用性,满足用户的用

车联网中的车辆距离确定方法和装置.pdf
本发明提供一种车联网中的车辆距离确定方法和装置,用以在卫星定位失效时,确定车联网中车辆之间的距离。所述车辆中安装有定向天线,所述定向天线与所述车辆的车载通信模块连接;所述车联网中的车辆距离确定方法中,包括:第一车辆通过第一定向天线接收第二车辆通过第二定向天线发送的车辆定位辅助信息,所述车辆定位辅助信息包括所述第二定向天线的方向指示信息和所述车辆定位辅助信息的发送功率;所述第一车辆根据所述方向指示信息,确定所述第二车辆相对于自身的方向;以及所述第一车辆根据所述发送功率和自身接收所述车辆定位辅助信息的接收功率
用于确定距物体距离的距离测量装置.pdf
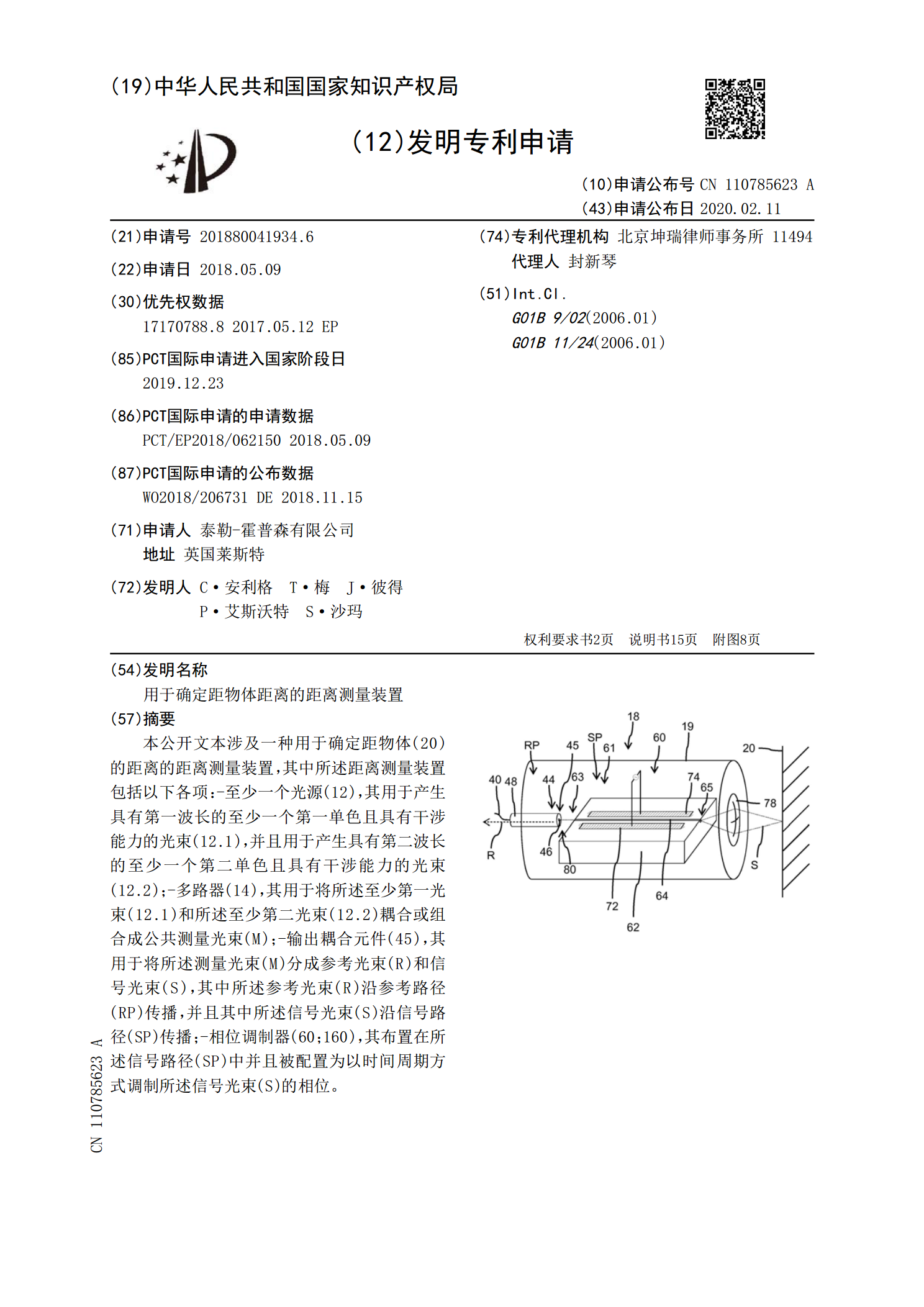
本公开文本涉及一种用于确定距物体(20)的距离的距离测量装置,其中所述距离测量装置包括以下各项:‑至少一个光源(12),其用于产生具有第一波长的至少一个第一单色且具有干涉能力的光束(12.1),并且用于产生具有第二波长的至少一个第二单色且具有干涉能力的光束(12.2);‑多路器(14),其用于将所述至少第一光束(12.1)和所述至少第二光束(12.2)耦合或组合成公共测量光束(M);‑输出耦合元件(45),其用于将所述测量光束(M)分成参考光束(R)和信号光束(S),其中所述参考光束(R)沿参考路径(RP