
一种车辆与障碍物之间距离确定方法及装置.pdf

邻家****曼玉

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车辆与障碍物之间距离确定方法及装置.pdf
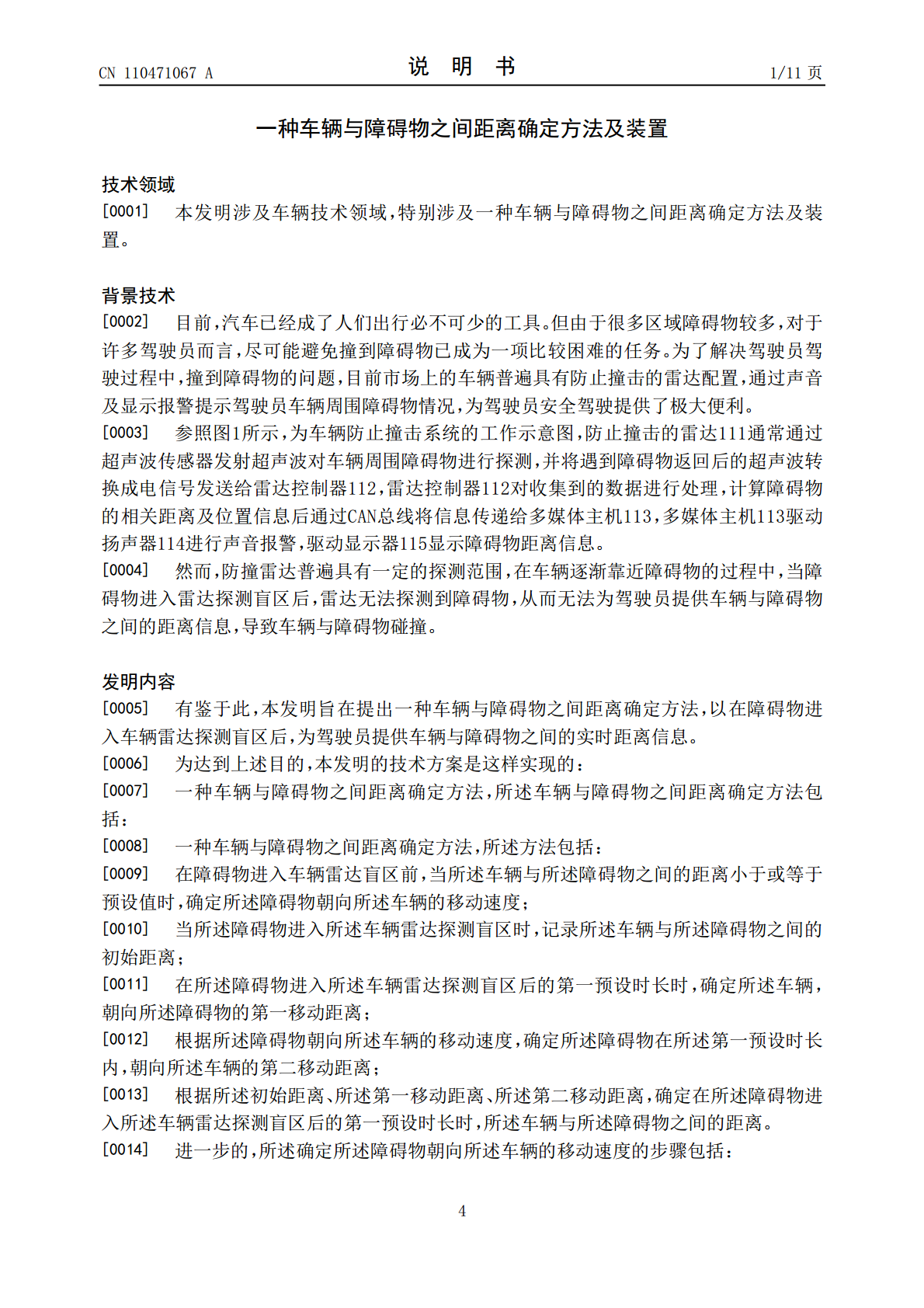
本发明提供了一种车辆与障碍物之间距离确定方法及装置,所述方法包括:在障碍物进入车辆雷达盲区前,确定所述障碍物朝向所述车辆的移动速度;当所述障碍物进入所述车辆雷达探测盲区时,记录所述车辆与所述障碍物之间的初始距离;确定所述车辆,朝向所述障碍物的第一移动距离;根据所述障碍物朝向所述车辆的移动速度,确定所述障碍物朝向所述车辆的第二移动距离;根据所述初始距离、所述第一移动距离、所述第二移动距离,确定在所述障碍物进入所述车辆雷达探测盲区后,所述车辆与所述障碍物之间的距离。本发明所述的车辆与障碍物之间距离确定方法,能

车辆与障碍物的距离检测方法及装置.pdf
本申请实施例公开了一种车辆与障碍物的距离检测方法及装置,该方法包括:获取全景图像,全景图像中包括至少一个目标对象;对全景图像进行分割处理,得到每个目标对象的对象信息,对象信息包括:类别信息、标识信息以及轮廓信息;根据对象信息,确定车辆的观察点与每个目标对象的目标距离。根据本申请的实施例,能够准确检测目标对象。
一种障碍物轮廓的确定方法及装置、车辆、存储介质.pdf
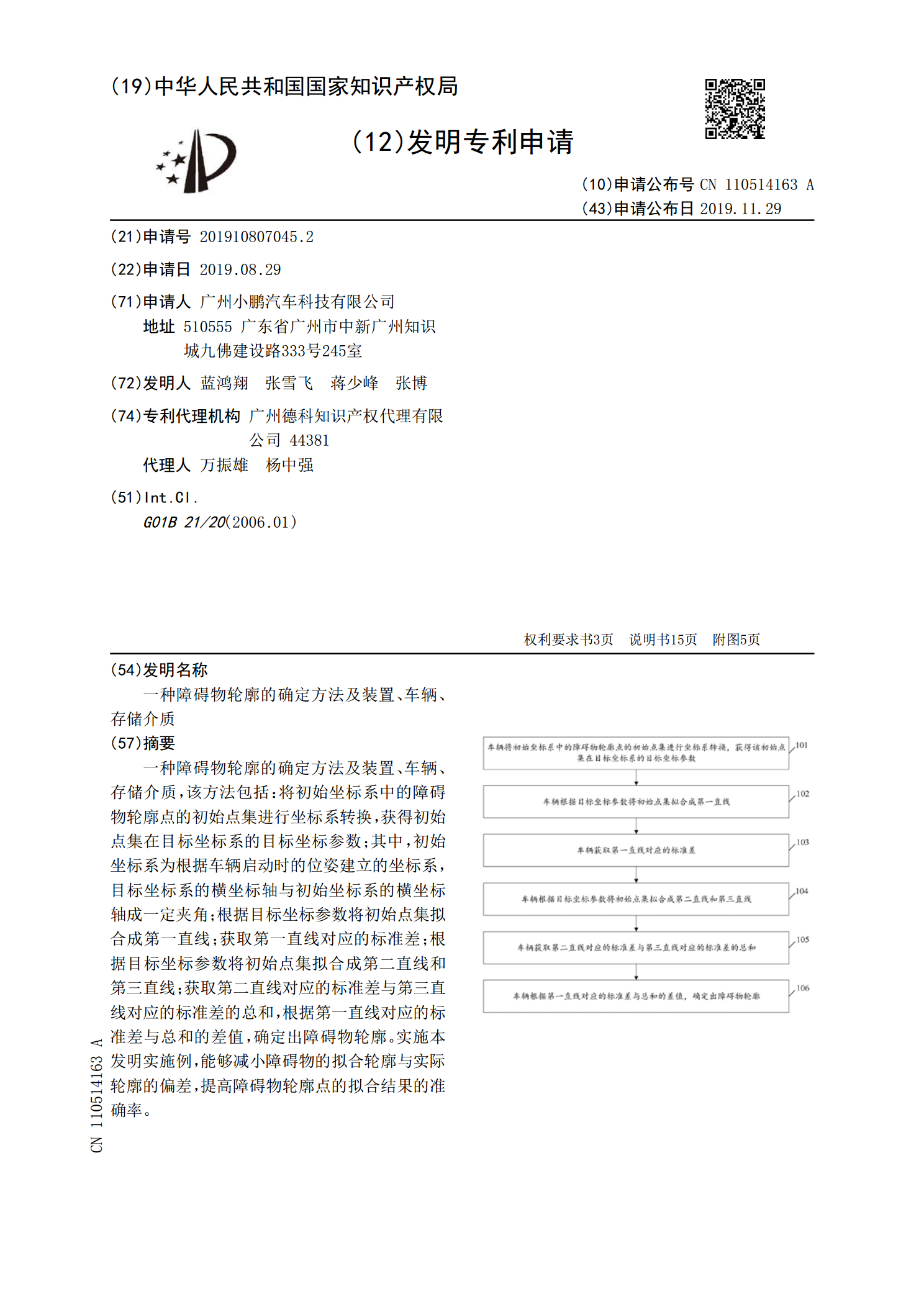
一种障碍物轮廓的确定方法及装置、车辆、存储介质,该方法包括:将初始坐标系中的障碍物轮廓点的初始点集进行坐标系转换,获得初始点集在目标坐标系的目标坐标参数;其中,初始坐标系为根据车辆启动时的位姿建立的坐标系,目标坐标系的横坐标轴与初始坐标系的横坐标轴成一定夹角;根据目标坐标参数将初始点集拟合成第一直线;获取第一直线对应的标准差;根据目标坐标参数将初始点集拟合成第二直线和第三直线;获取第二直线对应的标准差与第三直线对应的标准差的总和,根据第一直线对应的标准差与总和的差值,确定出障碍物轮廓。实施本发明实施例,能
识别车辆与障碍物距离的方法、装置、设备和存储介质.pdf
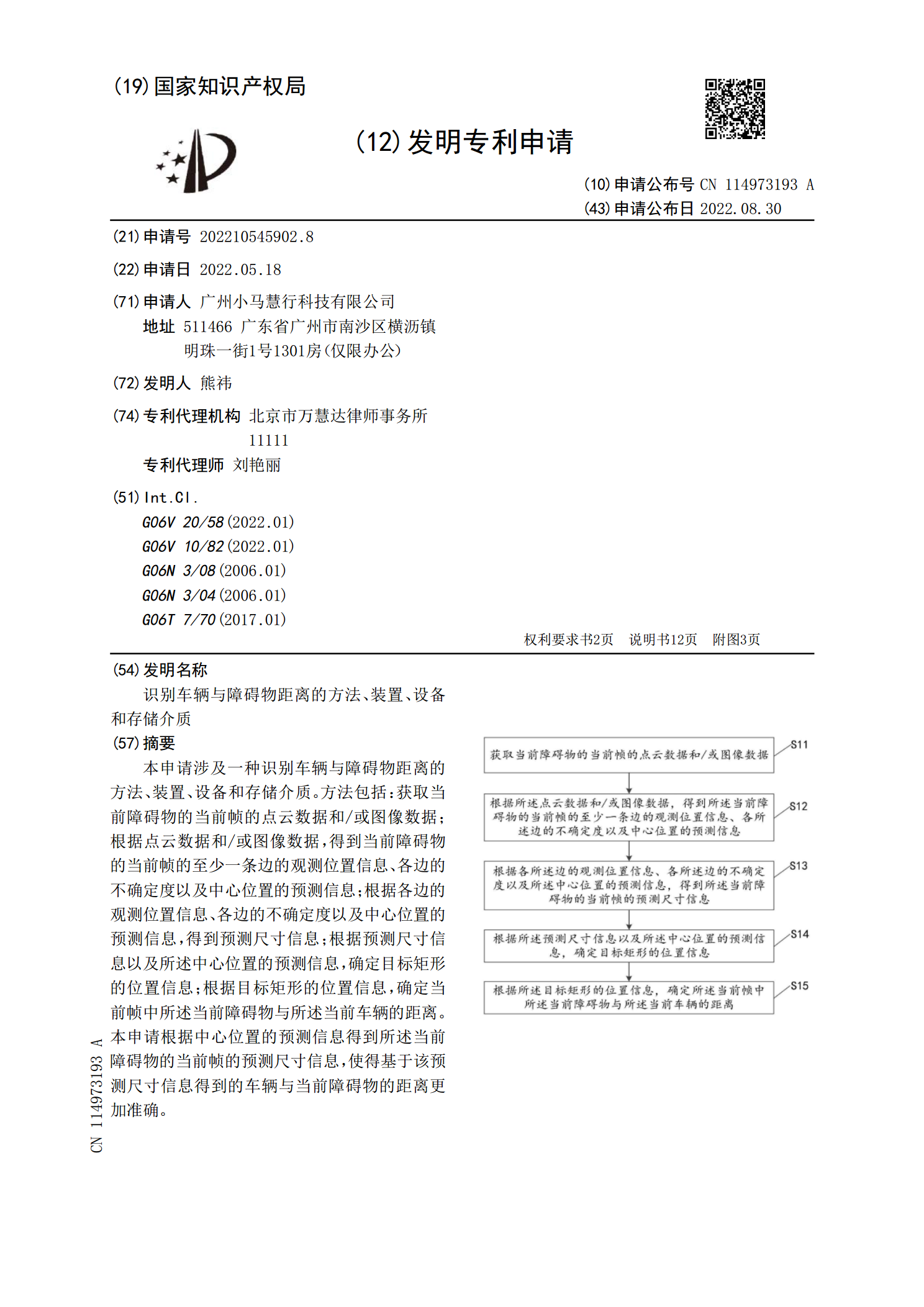
本申请涉及一种识别车辆与障碍物距离的方法、装置、设备和存储介质。方法包括:获取当前障碍物的当前帧的点云数据和/或图像数据;根据点云数据和/或图像数据,得到当前障碍物的当前帧的至少一条边的观测位置信息、各边的不确定度以及中心位置的预测信息;根据各边的观测位置信息、各边的不确定度以及中心位置的预测信息,得到预测尺寸信息;根据预测尺寸信息以及所述中心位置的预测信息,确定目标矩形的位置信息;根据目标矩形的位置信息,确定当前帧中所述当前障碍物与所述当前车辆的距离。本申请根据中心位置的预测信息得到所述当前障碍物的当前

一种确定车辆周围物体距离的方法、装置及系统.pdf
本发明提供一种确定车辆周围物体距离的方法、装置及系统,所述方法包括:获取安装在车辆上的雷达采集的第一数据,以及获取安装在车辆上的图像采集器采集的第二数据;第一数据为用于指示车辆周围物体与雷达之间的距离的数据;第二数据为用于指示车辆周围物体的图像的数据;基于预先标定的雷达与图像采集器的坐标对应关系,将第一数据与第二数据进行匹配,以确定所述距离与所述图像的匹配关系。本发明通过标定雷达与图像采集器的坐标对应关系,从而可将雷达采集的车辆周围物体的准确距离信息与图像采集器采集的车辆周围物体的图像信息进行匹配,解决了