
电动车辆驱动系统.pdf

梦影****主a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电动车辆驱动系统.pdf
本发明公开了一种电动车辆驱动系统,包括DC/DC变换单元、逆变器、永磁同步电机、Cark变换模块、Park变换模块、转子位置传感器、分数阶PID调节器、电流调节器、Park逆变换模块、和脉冲宽度调制模块;所述转子位置传感器的输入端连接永磁同步电机的转子参数输出端,转子位置传感器的转子位置输出端连接Park变换模块的转子位置数据输入端;转子位置传感器的转子角速度数据输出端连接第一比较器的反向输入端,第一比较器的正向输入端与转速给定信号相连;第一比较器的输出端与分数阶PID调节器的输入端连接。本发明提高了系统

电动车辆驱动系统.pdf
一种电动车辆驱动系统,在该电动车辆驱动系统中,电动马达容置在马达室内,马达室形成为通过壳体内的间隔壁与齿轮室分开,并且,将动力从电动马达传输至车轴的传动装置容置在齿轮室内,该电动车辆驱动系统包括:旋转构件,旋转构件在齿轮室内与间隔壁以预定间隙隔开地设置并且连接至电动马达的输出轴。间隔壁具有第一连通孔,第一连通孔形成在旋转构件的沿径向方向的最外侧点的径向内侧的位置处,并且第一连通孔提供齿轮室与马达室之间的连通。
电动车辆以及用于电动车辆的驱动系统.pdf
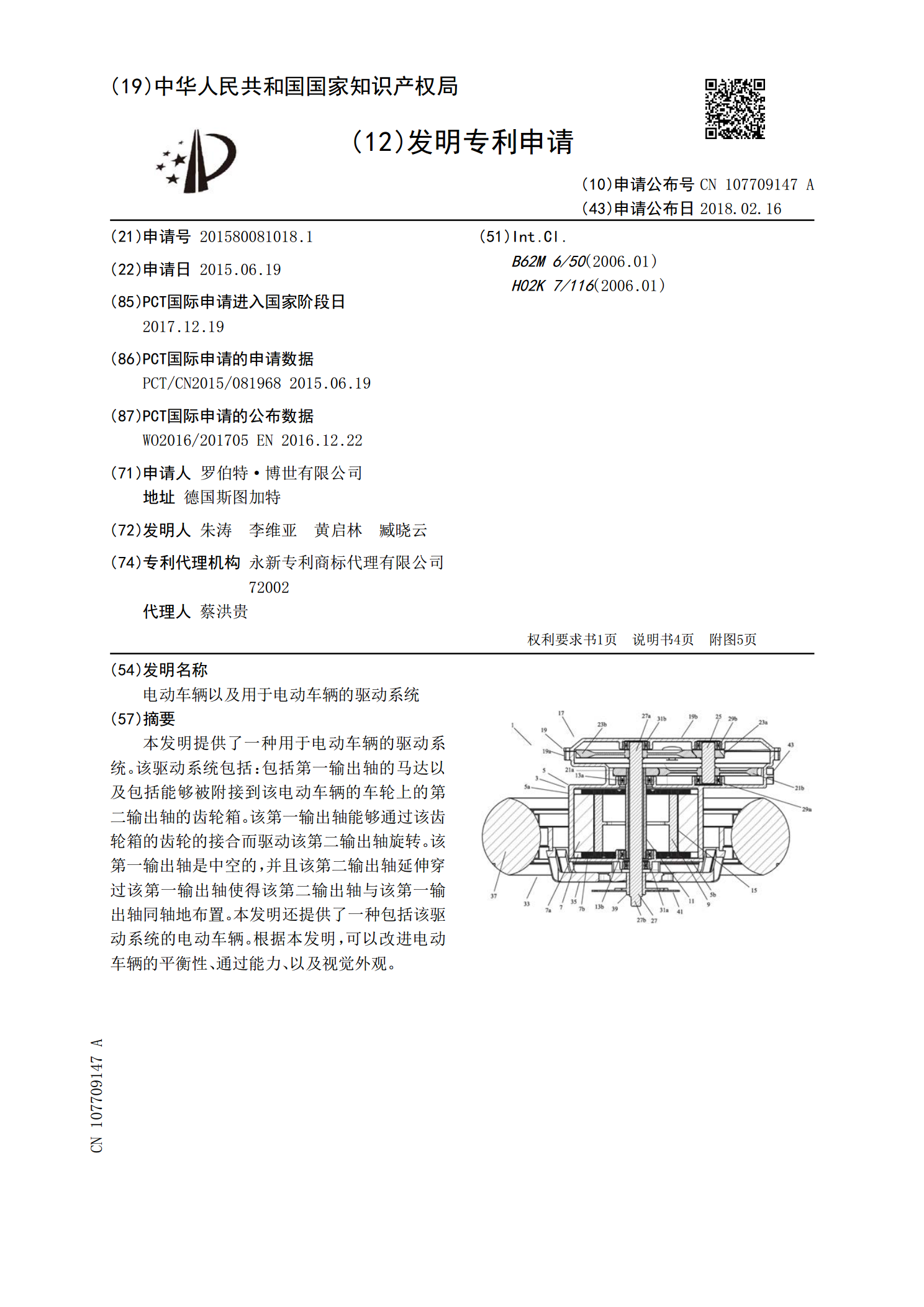
本发明提供了一种用于电动车辆的驱动系统。该驱动系统包括:包括第一输出轴的马达以及包括能够被附接到该电动车辆的车轮上的第二输出轴的齿轮箱。该第一输出轴能够通过该齿轮箱的齿轮的接合而驱动该第二输出轴旋转。该第一输出轴是中空的,并且该第二输出轴延伸穿过该第一输出轴使得该第二输出轴与该第一输出轴同轴地布置。本发明还提供了一种包括该驱动系统的电动车辆。根据本发明,可以改进电动车辆的平衡性、通过能力、以及视觉外观。

车辆电动机驱动系统.pdf
一种车辆电动机驱动系统(10)包括电动机(12)、逆变器(34)以及屏蔽线(36),其中,电动机安装到簧下车身并且通过被供应电力来产生用于使车轮旋转的动力,逆变器安装到簧上车身并且将直流电力转变成交流电力然后将电力供应给电动机(12),屏蔽线作为将电动机(12)电连接到逆变器(34)的电力缆线。屏蔽线(36)的屏蔽层在以下位置中的至少一个位置处接地:在容纳电动机(12)的电动机壳体(18)与悬架臂连接的连接部附近的位置,以及在轮毂轴承(28)安装在电动机壳体(18)中的安装部附近的位置。

电动机驱动车辆的转向系统.pdf
本发明的目的是提供一种电动机驱动的车辆的转向系统,其具有与只安装传统内燃机的车辆的转向操作性等同的转向操作性,并且即使在执行转向力辅助的失效保护控制期间也具有与固有转向操作性等同的转向操作性。为了实现该目的,电动机驱动的车辆包括:作为电动机驱动的车辆的动力源的驱动电动机、检测驱动电动机的速度的电动机速度传感器、根据方向盘的转向角度而向前轮提供转向角度的转向系统、检测电动机驱动的车辆的速度的车辆速度传感器和基于电动机速度传感器和车辆速度传感器的输出信号中的至少一个根据乘员的转向操作而输出辅助量的动力转向控制