
一种抓取机器人.pdf

阳炎****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种抓取机器人.pdf
本发明涉及娱乐机器人技术领域,公开了抓取机器人。本发明抓取机器人包括机器人主体、转动设置于机器人主体上的机械臂以及与机械臂转动连接的机械手,机械臂与机器人主体通过第一转动轴转动连接,第一转动轴与第一驱动电机的输出端转动连接,第一驱动电机还电连接有驱动电缆,驱动电缆包括依次设置的第一电缆、第二电缆、第三电缆,转动轴的侧面上、对应于机械臂内的位置处设有供第三电缆顺出的开口,第一电缆固设于机器人主体上,第二电缆沿转动轴的轴线设置于转动轴内,第三电缆从转动轴的开口顺出,并固设于机械臂内。本发明的抓取机器人避免了驱

一种机器人的抓取装置.pdf
本发明公开了一种机器人的抓取装置,包括固定杆,所述固定杆的底端固定设有转轴,且转轴铰接连接两根夹持爪的根部,所述固定杆上滑动套设有推动块,所述推动块的两侧固定设有两根第一铰接轴,且两根第一铰接轴铰接连接两根推送杆的上端,本发明当推动块向下滑动的时候,两根推送杆的上端受挤压,使得推送杆的下端向外张开,带动夹持爪的张开,当推动块向上滑动的时候,推送杆的上端受拉伸,使得推送杆的下端向内收缩,带动夹持爪闭合,支撑槽起到支撑的作用,使推送杆始终保持在竖直方向运动,使夹持爪的张开与闭合更加稳定,导向轨对推动块的滑动起

一种无人抓取机器人.pdf
本发明提供一种无人抓取机器人,包括机械手和载物车,所述机械手包括载物架;所述载物架上部的两侧设置有Y轴滑轨;所述Y轴滑轨的上部设置有X轴滑轨;所述X轴滑轨上有活动板,固定板上有Z轴滑轨,Z轴滑轨上有Z轴活动板,活动板上设置若干机械手;所述Z轴活动板两侧的机械手上设置有摄像头;所述载物架的下部设置有托盘;所述转轴穿过电机外壳与R轴电机相连接;所述电机外壳的两侧分别设置有控制箱和电池箱;所述护板的内部设置有驱动轮、万向轮和地标传感器。本发明的有益之处在于:结构简单,使用方便,它可代替人的繁重劳动以实现生产的机

一种机器人抓取组件.pdf
本发明提供了一种机器人抓取系统,通过一个蜗杆带动四个蜗轮,蜗轮上连接手爪,当蜗杆转动时带动四个蜗轮一起同向转动,固定于蜗轮上的手爪在蜗轮的带动下实现张开和闭合,以达到抓取物品的目的。同时,利用蜗轮蜗杆的自锁功能,也能提高手爪抓物的稳定性。
一种智能抓取机器人.pdf
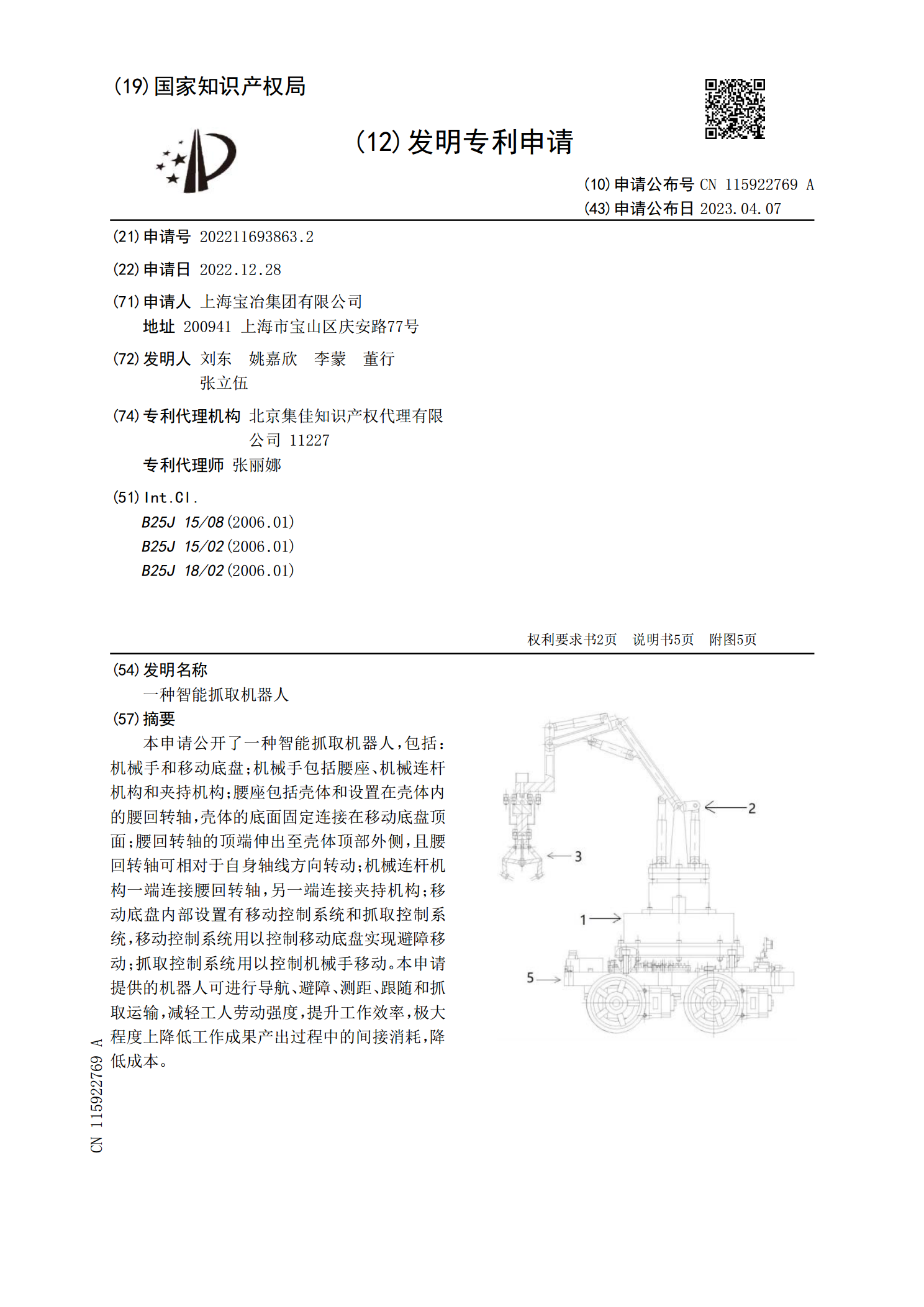
本申请公开了一种智能抓取机器人,包括:机械手和移动底盘;机械手包括腰座、机械连杆机构和夹持机构;腰座包括壳体和设置在壳体内的腰回转轴,壳体的底面固定连接在移动底盘顶面;腰回转轴的顶端伸出至壳体顶部外侧,且腰回转轴可相对于自身轴线方向转动;机械连杆机构一端连接腰回转轴,另一端连接夹持机构;移动底盘内部设置有移动控制系统和抓取控制系统,移动控制系统用以控制移动底盘实现避障移动;抓取控制系统用以控制机械手移动。本申请提供的机器人可进行导航、避障、测距、跟随和抓取运输,减轻工人劳动强度,提升工作效率,极大程度上降