
一种无人抓取机器人.pdf

书生****写意


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种无人抓取机器人.pdf
本发明提供一种无人抓取机器人,包括机械手和载物车,所述机械手包括载物架;所述载物架上部的两侧设置有Y轴滑轨;所述Y轴滑轨的上部设置有X轴滑轨;所述X轴滑轨上有活动板,固定板上有Z轴滑轨,Z轴滑轨上有Z轴活动板,活动板上设置若干机械手;所述Z轴活动板两侧的机械手上设置有摄像头;所述载物架的下部设置有托盘;所述转轴穿过电机外壳与R轴电机相连接;所述电机外壳的两侧分别设置有控制箱和电池箱;所述护板的内部设置有驱动轮、万向轮和地标传感器。本发明的有益之处在于:结构简单,使用方便,它可代替人的繁重劳动以实现生产的机
一种无人机抓取装置.pdf
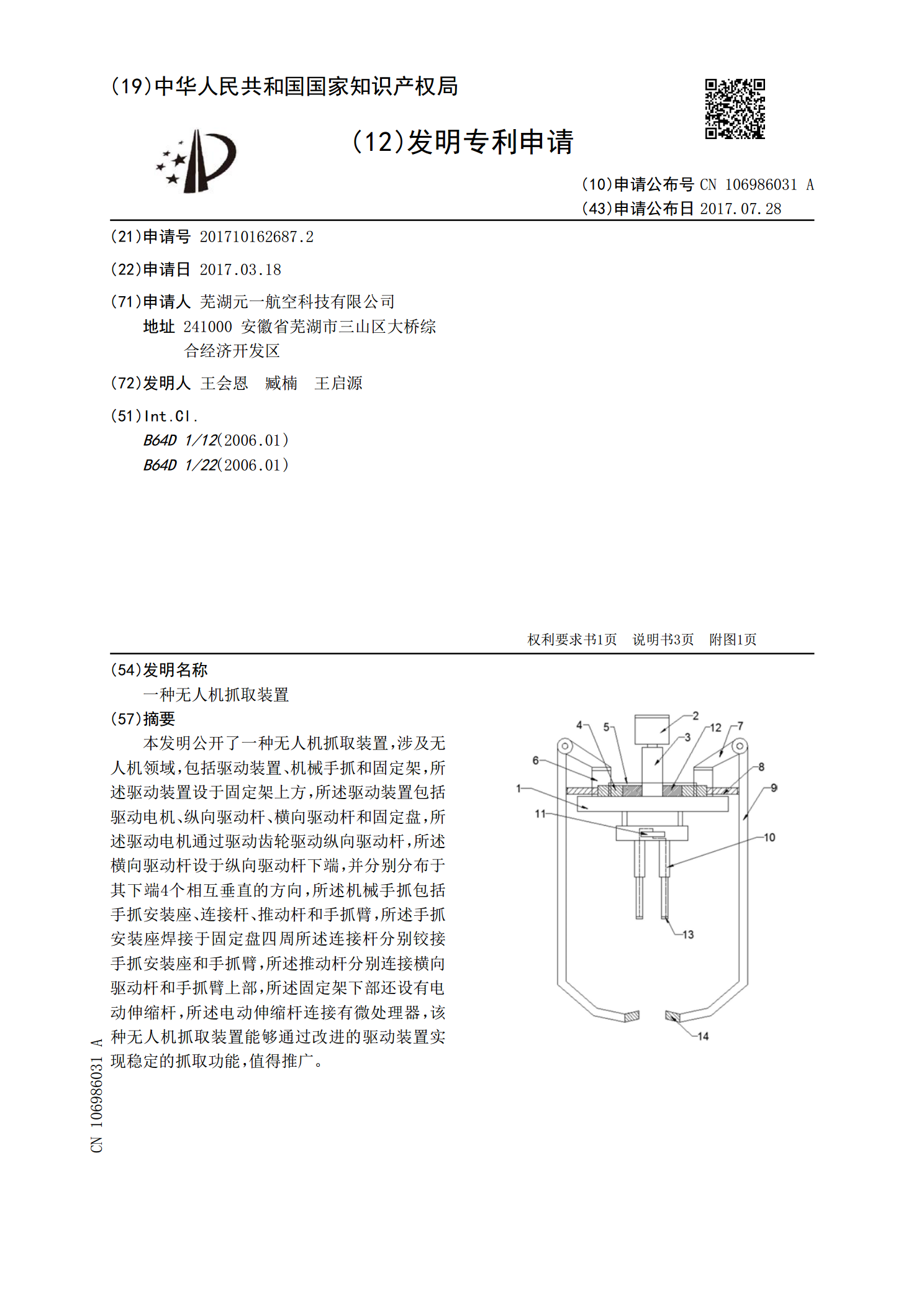
本发明公开了一种无人机抓取装置,涉及无人机领域,包括驱动装置、机械手抓和固定架,所述驱动装置设于固定架上方,所述驱动装置包括驱动电机、纵向驱动杆、横向驱动杆和固定盘,所述驱动电机通过驱动齿轮驱动纵向驱动杆,所述横向驱动杆设于纵向驱动杆下端,并分别分布于其下端4个相互垂直的方向,所述机械手抓包括手抓安装座、连接杆、推动杆和手抓臂,所述手抓安装座焊接于固定盘四周所述连接杆分别铰接手抓安装座和手抓臂,所述推动杆分别连接横向驱动杆和手抓臂上部,所述固定架下部还设有电动伸缩杆,所述电动伸缩杆连接有微处理器,该种无人

一种抓取机器人.pdf
本发明涉及娱乐机器人技术领域,公开了抓取机器人。本发明抓取机器人包括机器人主体、转动设置于机器人主体上的机械臂以及与机械臂转动连接的机械手,机械臂与机器人主体通过第一转动轴转动连接,第一转动轴与第一驱动电机的输出端转动连接,第一驱动电机还电连接有驱动电缆,驱动电缆包括依次设置的第一电缆、第二电缆、第三电缆,转动轴的侧面上、对应于机械臂内的位置处设有供第三电缆顺出的开口,第一电缆固设于机器人主体上,第二电缆沿转动轴的轴线设置于转动轴内,第三电缆从转动轴的开口顺出,并固设于机械臂内。本发明的抓取机器人避免了驱
一种装备于无人机的抓取机构.pdf
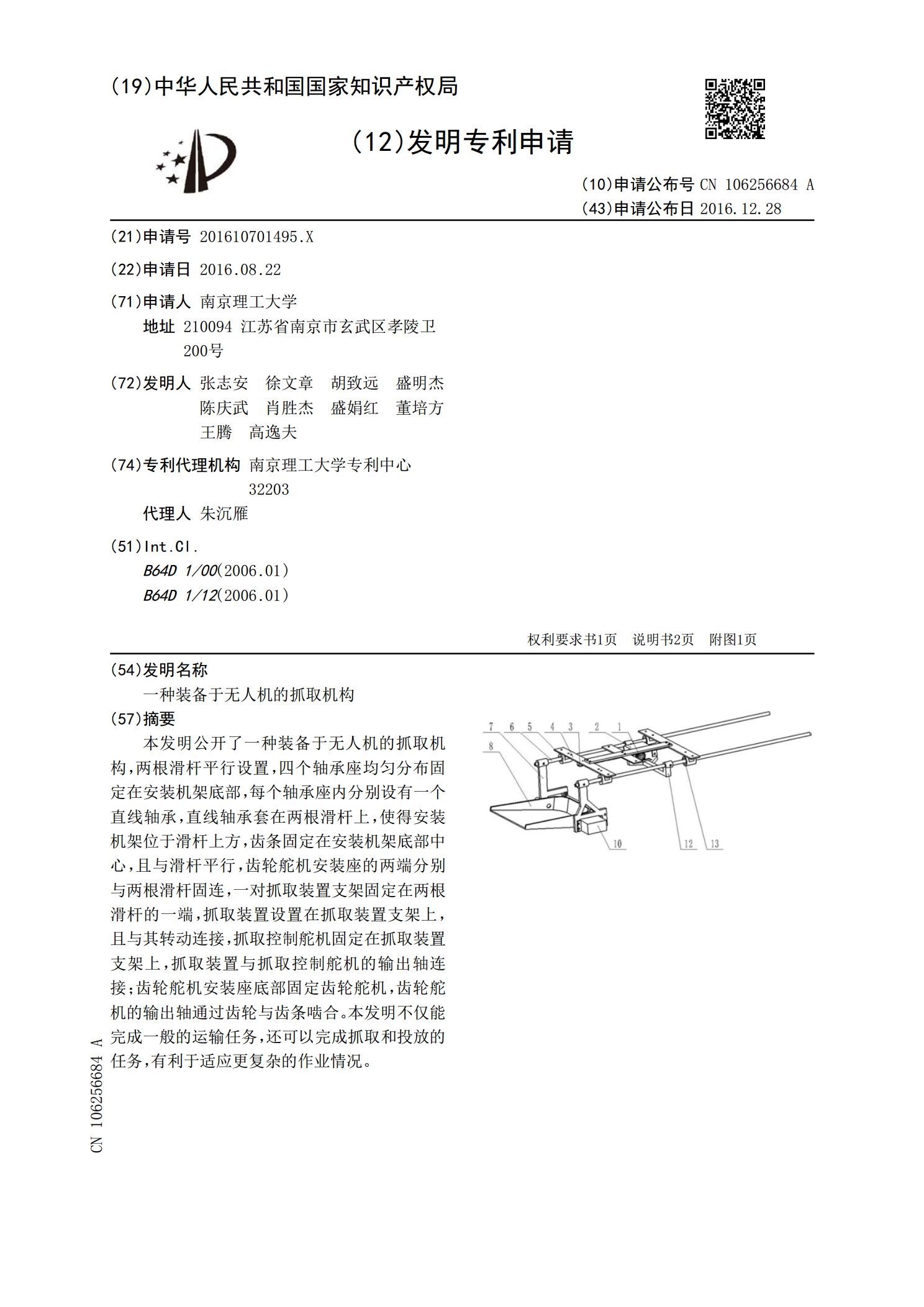
本发明公开了一种装备于无人机的抓取机构,两根滑杆平行设置,四个轴承座均匀分布固定在安装机架底部,每个轴承座内分别设有一个直线轴承,直线轴承套在两根滑杆上,使得安装机架位于滑杆上方,齿条固定在安装机架底部中心,且与滑杆平行,齿轮舵机安装座的两端分别与两根滑杆固连,一对抓取装置支架固定在两根滑杆的一端,抓取装置设置在抓取装置支架上,且与其转动连接,抓取控制舵机固定在抓取装置支架上,抓取装置与抓取控制舵机的输出轴连接;齿轮舵机安装座底部固定齿轮舵机,齿轮舵机的输出轴通过齿轮与齿条啮合。本发明不仅能完成一般的运输
一种无人机飞行抓取系统.pdf
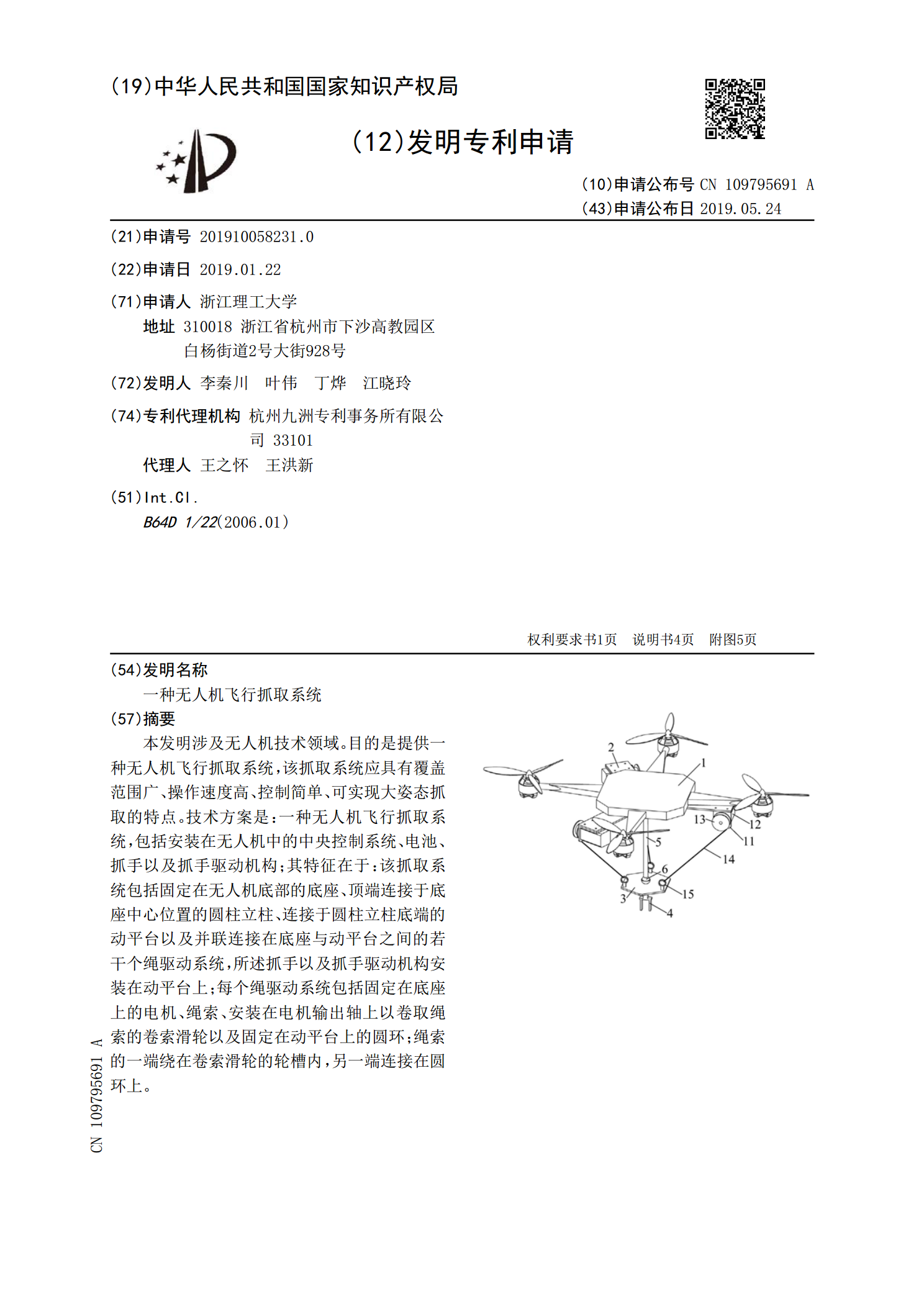
本发明涉及无人机技术领域。目的是提供一种无人机飞行抓取系统,该抓取系统应具有覆盖范围广、操作速度高、控制简单、可实现大姿态抓取的特点。技术方案是:一种无人机飞行抓取系统,包括安装在无人机中的中央控制系统、电池、抓手以及抓手驱动机构;其特征在于:该抓取系统包括固定在无人机底部的底座、顶端连接于底座中心位置的圆柱立柱、连接于圆柱立柱底端的动平台以及并联连接在底座与动平台之间的若干个绳驱动系统,所述抓手以及抓手驱动机构安装在动平台上;每个绳驱动系统包括固定在底座上的电机、绳索、安装在电机输出轴上以卷取绳索的卷索