
一种建筑物智能喷涂的机器人及自动喷涂方法.pdf

Wi****m7


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种建筑物智能喷涂的机器人及自动喷涂方法.pdf
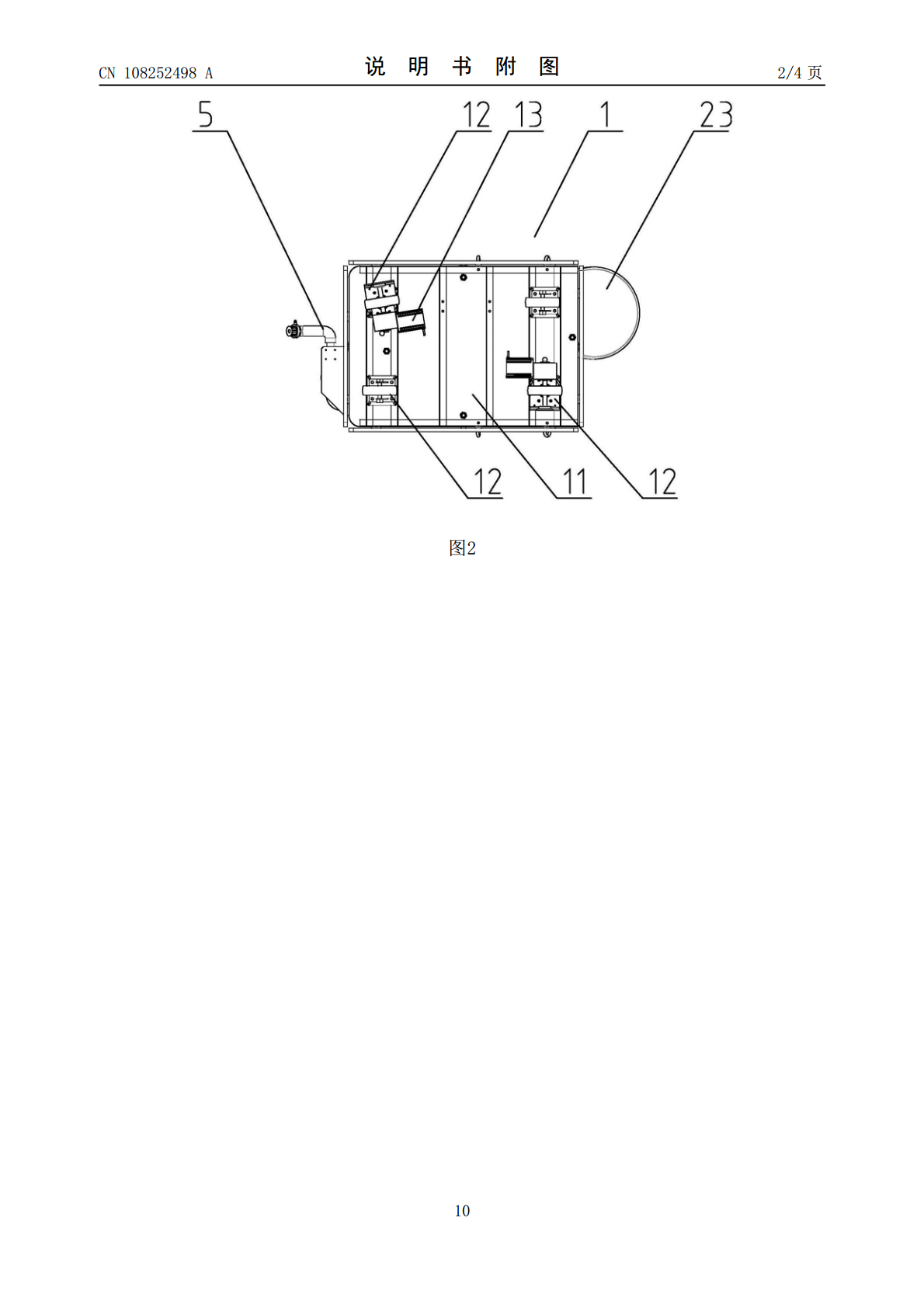
本发明的一种建筑物智能喷涂的机器人,包括自动行驶底盘、机身、激光雷达组件、红外雷达、旋转喷涂组件、滑台模组以及控制器,机身固定在所述自动行驶底盘上,控制器连接在机身内部,滑台模组固定在所述机身上,旋转喷涂组件连接在所述滑台模组上;自动行驶底盘、激光雷达组件、红外雷达、旋转喷涂组件、滑台模组均电连接控制器。本发明的自动喷涂方法,包括如下步骤,a、启动;b、激光雷达扫描室内情况;c、激光雷达发射探测信号,并收集扫描的结果;d、对收集的信号处理并建模,根据模型开始自动喷涂。本发明代替人工操作,根据建立的模型自动
一种压敏涂料智能自动喷涂系统及喷涂方法.pdf
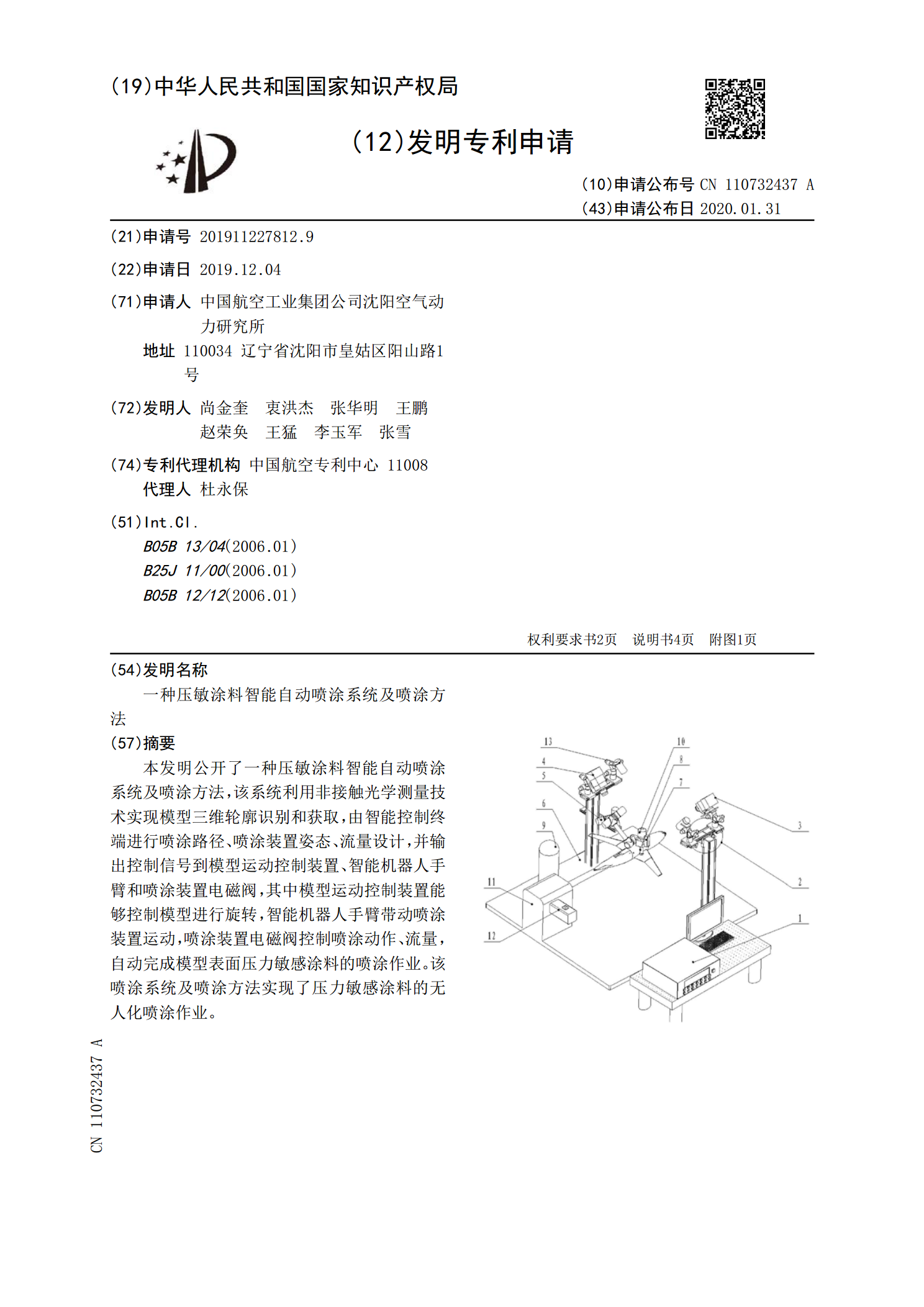
本发明公开了一种压敏涂料智能自动喷涂系统及喷涂方法,该系统利用非接触光学测量技术实现模型三维轮廓识别和获取,由智能控制终端进行喷涂路径、喷涂装置姿态、流量设计,并输出控制信号到模型运动控制装置、智能机器人手臂和喷涂装置电磁阀,其中模型运动控制装置能够控制模型进行旋转,智能机器人手臂带动喷涂装置运动,喷涂装置电磁阀控制喷涂动作、流量,自动完成模型表面压力敏感涂料的喷涂作业。该喷涂系统及喷涂方法实现了压力敏感涂料的无人化喷涂作业。
一种机器人自动喷涂系统及喷涂工艺.pdf
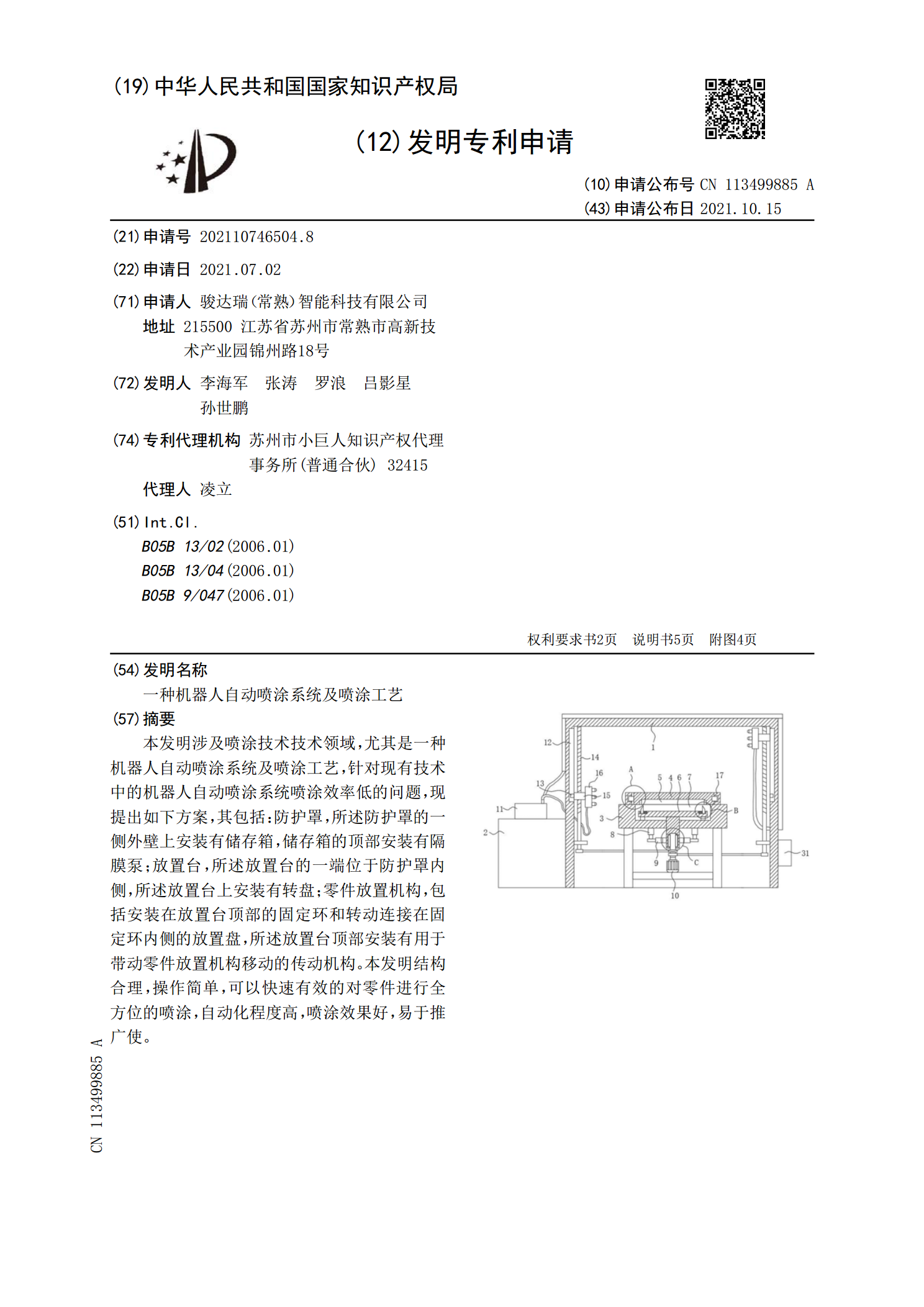
本发明涉及喷涂技术技术领域,尤其是一种机器人自动喷涂系统及喷涂工艺,针对现有技术中的机器人自动喷涂系统喷涂效率低的问题,现提出如下方案,其包括:防护罩,所述防护罩的一侧外壁上安装有储存箱,储存箱的顶部安装有隔膜泵;放置台,所述放置台的一端位于防护罩内侧,所述放置台上安装有转盘;零件放置机构,包括安装在放置台顶部的固定环和转动连接在固定环内侧的放置盘,所述放置台顶部安装有用于带动零件放置机构移动的传动机构。本发明结构合理,操作简单,可以快速有效的对零件进行全方位的喷涂,自动化程度高,喷涂效果好,易于推广使。

一种喷涂机器人及其喷涂方法.pdf
本发明公开一种喷涂机器人,包括呈C型的连接环、用于带动连接环转动的电动转台、机架、控制装置、用于夹住矩形箱体型的工件的夹持装置、第一雾化喷头和第二雾化喷头,所述连接环位于电动转台上面,所述连接环为中空设置,所述连接环内部形成有气腔,所述连接环的内环面开有排气孔,所述排气孔与气腔相连通,所述连接环上端面设置有连接板,所述连接板与连接环固定连接,所述机架上设置有轴承,所述连接板与轴承的内圈固定连接,所述连接板与机架通过轴承转动连接,所述连接板上设置有底漆灌、第一泵体、面漆灌、第二泵体和向气腔提供热风的热风机;

一种自动喷涂装置及喷涂方法.pdf
本发明公开了一种自动喷涂装置,包括支架,设置在支架上的粉槽,外喷喷枪,内喷喷枪,所述外喷喷枪为至少一个,固定在所述滚轮架两侧的支架上;所述粉槽上设置有拱形槽盖,开启时槽盖滑入粉槽的底部,闭合时槽盖滑至粉槽上方空间并将外喷喷枪封闭在槽盖内部;所述粉槽一侧设置有进风口,底部设置有回收进粉口,与粉末回收装置连接;所述粉槽两端的上方分别设置有风幕机。本发明还公开利用该装置进行喷涂的方法。本发明自动喷涂装置,通过在粉槽上设置有拱形槽盖,两端的上方分别设置风幕机达到密封的目的,使喷涂过程中粉末不会外扬,粉末回收率高达