
一种压敏涂料智能自动喷涂系统及喷涂方法.pdf

是笛****加盟


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种压敏涂料智能自动喷涂系统及喷涂方法.pdf
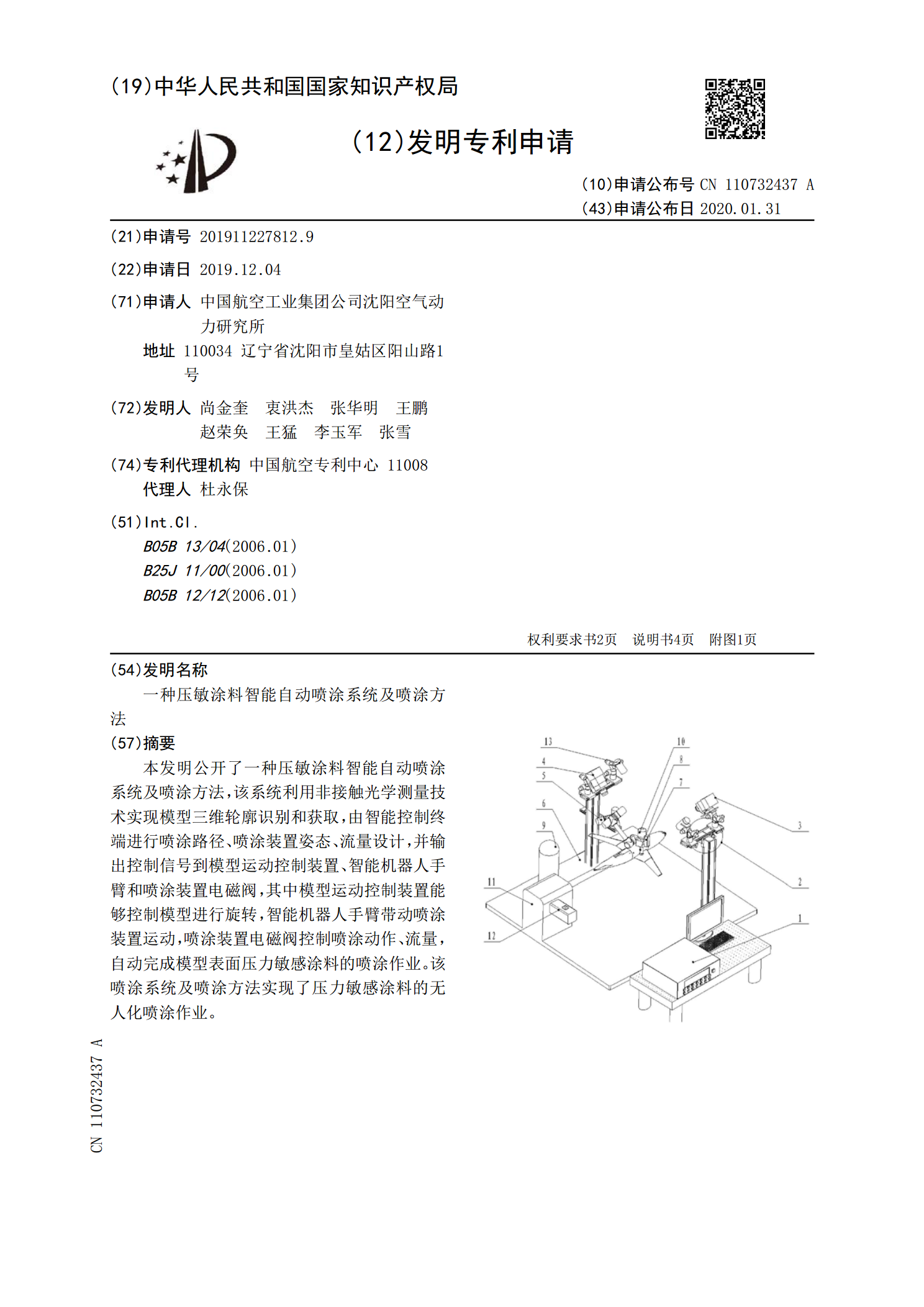
本发明公开了一种压敏涂料智能自动喷涂系统及喷涂方法,该系统利用非接触光学测量技术实现模型三维轮廓识别和获取,由智能控制终端进行喷涂路径、喷涂装置姿态、流量设计,并输出控制信号到模型运动控制装置、智能机器人手臂和喷涂装置电磁阀,其中模型运动控制装置能够控制模型进行旋转,智能机器人手臂带动喷涂装置运动,喷涂装置电磁阀控制喷涂动作、流量,自动完成模型表面压力敏感涂料的喷涂作业。该喷涂系统及喷涂方法实现了压力敏感涂料的无人化喷涂作业。
一种涂料喷涂装置及喷涂方法.pdf
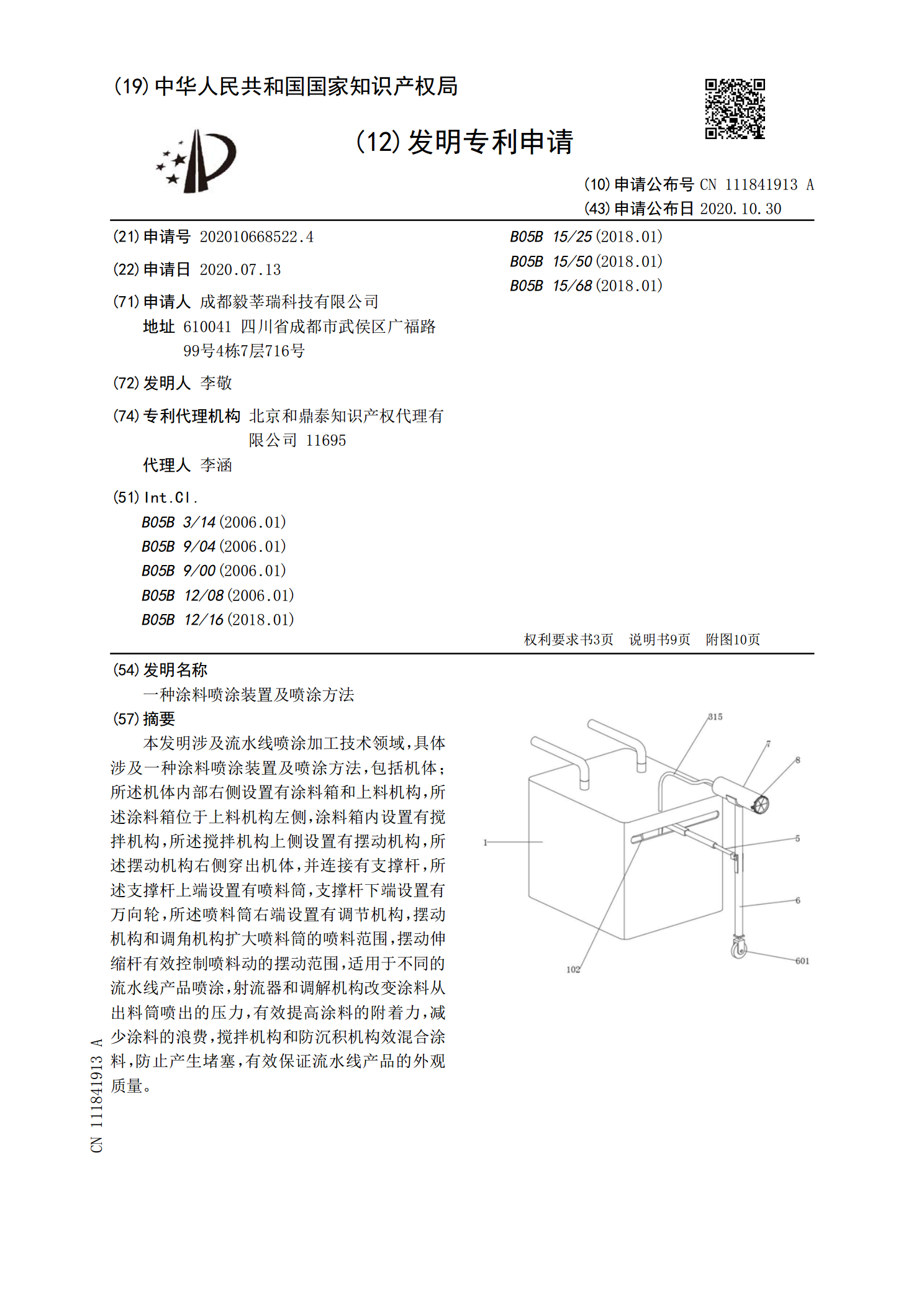
本发明涉及流水线喷涂加工技术领域,具体涉及一种涂料喷涂装置及喷涂方法,包括机体;所述机体内部右侧设置有涂料箱和上料机构,所述涂料箱位于上料机构左侧,涂料箱内设置有搅拌机构,所述搅拌机构上侧设置有摆动机构,所述摆动机构右侧穿出机体,并连接有支撑杆,所述支撑杆上端设置有喷料筒,支撑杆下端设置有万向轮,所述喷料筒右端设置有调节机构,摆动机构和调角机构扩大喷料筒的喷料范围,摆动伸缩杆有效控制喷料动的摆动范围,适用于不同的流水线产品喷涂,射流器和调解机构改变涂料从出料筒喷出的压力,有效提高涂料的附着力,减少涂料的浪

一种建筑物智能喷涂的机器人及自动喷涂方法.pdf
本发明的一种建筑物智能喷涂的机器人,包括自动行驶底盘、机身、激光雷达组件、红外雷达、旋转喷涂组件、滑台模组以及控制器,机身固定在所述自动行驶底盘上,控制器连接在机身内部,滑台模组固定在所述机身上,旋转喷涂组件连接在所述滑台模组上;自动行驶底盘、激光雷达组件、红外雷达、旋转喷涂组件、滑台模组均电连接控制器。本发明的自动喷涂方法,包括如下步骤,a、启动;b、激光雷达扫描室内情况;c、激光雷达发射探测信号,并收集扫描的结果;d、对收集的信号处理并建模,根据模型开始自动喷涂。本发明代替人工操作,根据建立的模型自动
一种缆索涂料喷涂装置及喷涂方法.pdf
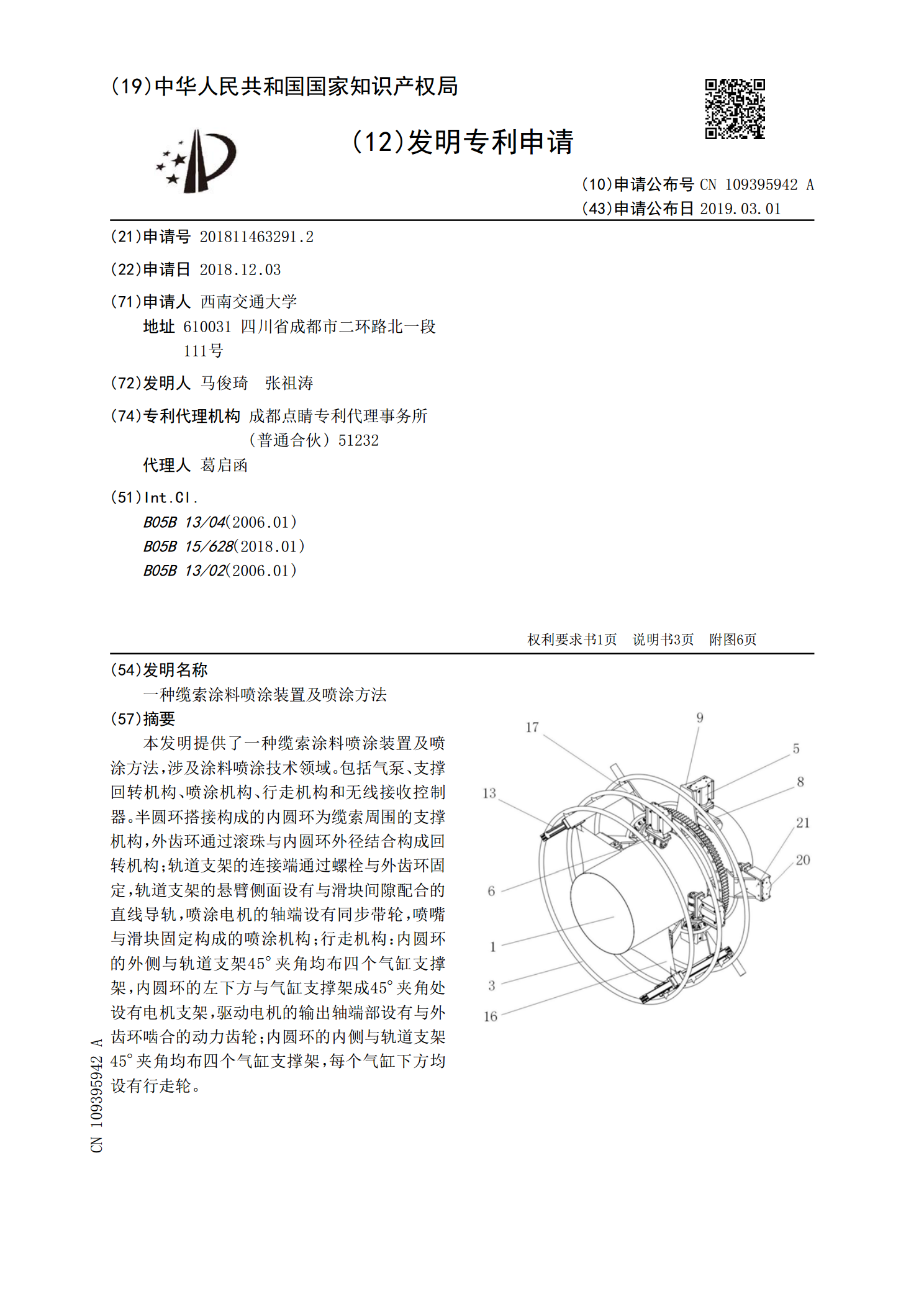
本发明提供了一种缆索涂料喷涂装置及喷涂方法,涉及涂料喷涂技术领域。包括气泵、支撑回转机构、喷涂机构、行走机构和无线接收控制器。半圆环搭接构成的内圆环为缆索周围的支撑机构,外齿环通过滚珠与内圆环外径结合构成回转机构;轨道支架的连接端通过螺栓与外齿环固定,轨道支架的悬臂侧面设有与滑块间隙配合的直线导轨,喷涂电机的轴端设有同步带轮,喷嘴与滑块固定构成的喷涂机构;行走机构:内圆环的外侧与轨道支架45°夹角均布四个气缸支撑架,内圆环的左下方与气缸支撑架成45°夹角处设有电机支架,驱动电机的输出轴端部设有与外齿环啮合

一种涂料喷涂机及连续喷涂方法.pdf
本发明涉及涂料喷涂机技术领域,且公开了一种涂料喷涂机,包括机体、第一往复运动罩、第二往复运动罩、电机箱,所述机体的背面固定安装有电机箱,所述电机箱的内部固定安装有驱动电机,所述驱动电机的前端转动连接有第二转轴。该涂料喷涂机,通过启动驱动电机带动第一伞轮进行转动,从而带动第二转轴进行转动,第二转轴使左右两端分别固定安装的扇形齿轮与相对应的往复运动罩的内部齿条啮合,继而带动往复运动罩往复运动,当第一往复运动罩下降时,第二往复运动罩上升,无需设置伺服电机,并控制伺服电机正反转交替进行,大大提高了工作效率,且驱动