
自移动设备的避障控制方法及自移动设备.pdf

白凡****12


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

自移动设备的避障控制方法及自移动设备.pdf
本发明揭示了一种自移动设备的避障控制方法,S1:将自移动设备的行走路径分割为N个动作,并预设自移动设备完成每个动作所需持续时间阈值;且,N>1;S2:自移动设备以任一动作为当前动作运动;S3:判断当前动作是否处于异常状态,若处于异常状态则执行步骤S4;若未处于异常状态则返回步骤S2;S4:检测当前动作持续时间是否满足对应动作的时间阈值,如果是则自移动设备执行步骤S5;如果否则返回步骤S2;S5:执行下一动作,并返回步骤S2;S6:重复步骤S2至S5,直到自移动设备完成行走路径或停止工作。本发明还提供一种自
自移动设备的避障方法、装置以及避障设备.pdf
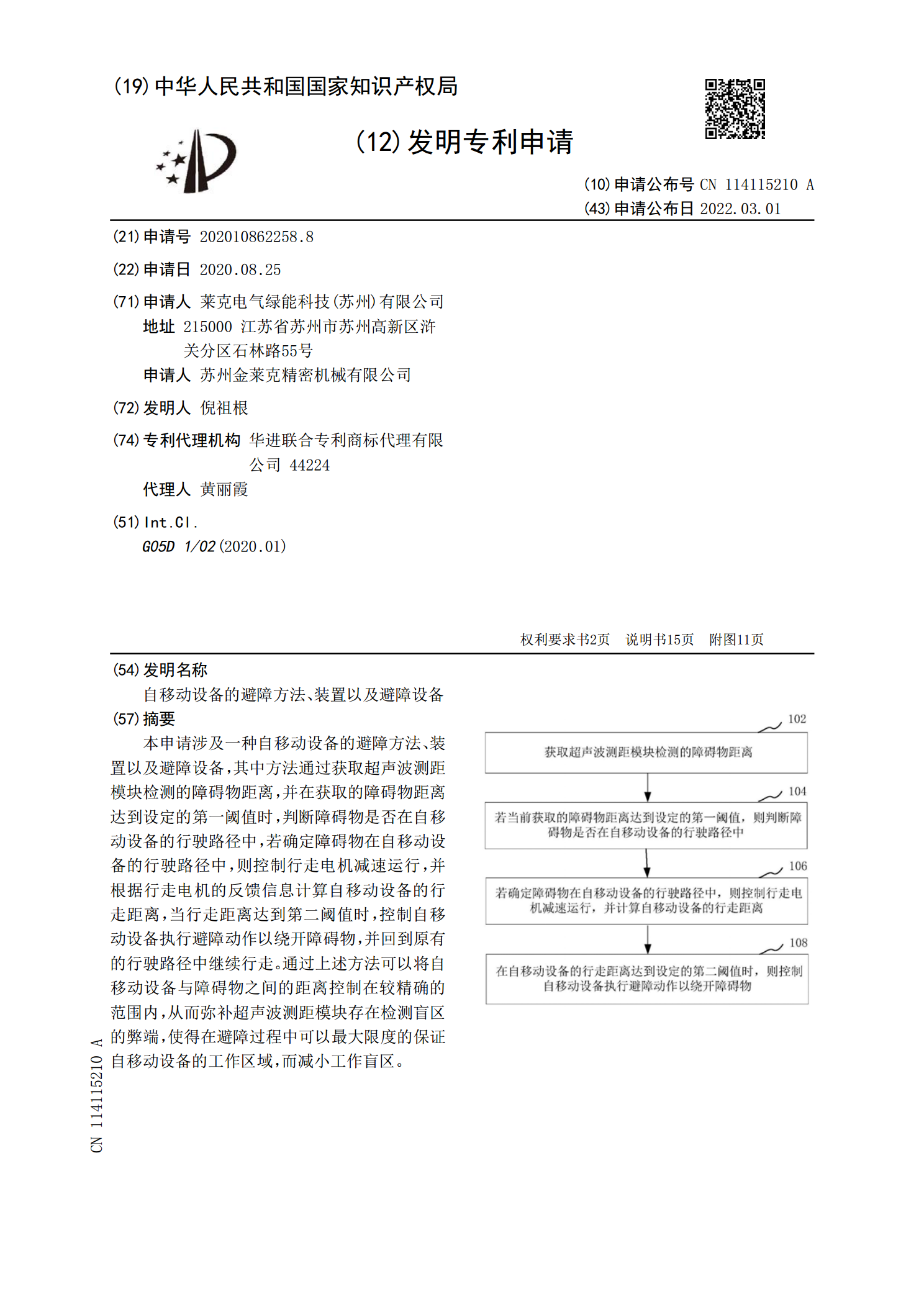
本申请涉及一种自移动设备的避障方法、装置以及避障设备,其中方法通过获取超声波测距模块检测的障碍物距离,并在获取的障碍物距离达到设定的第一阈值时,判断障碍物是否在自移动设备的行驶路径中,若确定障碍物在自移动设备的行驶路径中,则控制行走电机减速运行,并根据行走电机的反馈信息计算自移动设备的行走距离,当行走距离达到第二阈值时,控制自移动设备执行避障动作以绕开障碍物,并回到原有的行驶路径中继续行走。通过上述方法可以将自移动设备与障碍物之间的距离控制在较精确的范围内,从而弥补超声波测距模块存在检测盲区的弊端,使得在
自移动设备的控制方法、装置、自移动设备和介质.pdf
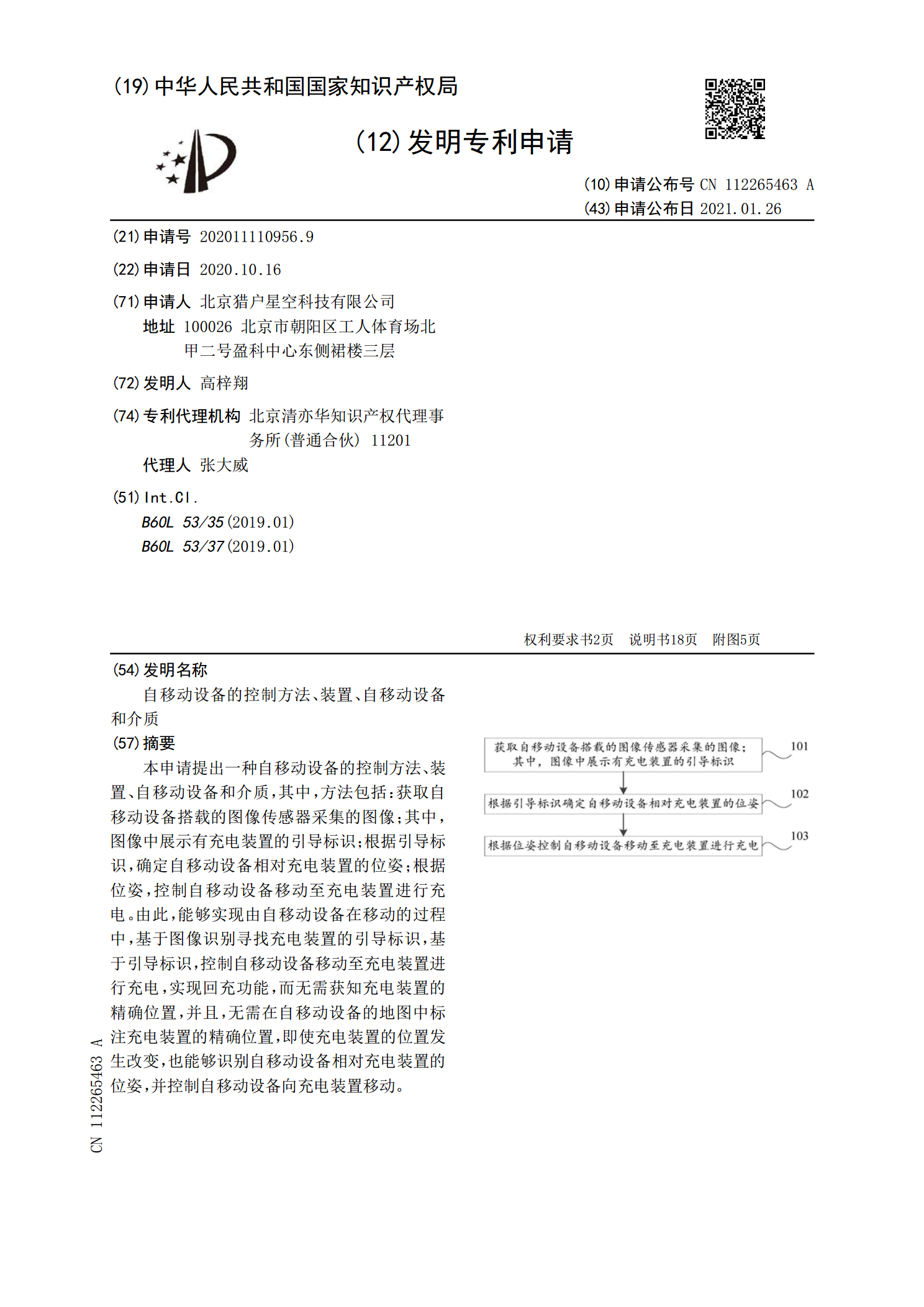
本申请提出一种自移动设备的控制方法、装置、自移动设备和介质,其中,方法包括:获取自移动设备搭载的图像传感器采集的图像;其中,图像中展示有充电装置的引导标识;根据引导标识,确定自移动设备相对充电装置的位姿;根据位姿,控制自移动设备移动至充电装置进行充电。由此,能够实现由自移动设备在移动的过程中,基于图像识别寻找充电装置的引导标识,基于引导标识,控制自移动设备移动至充电装置进行充电,实现回充功能,而无需获知充电装置的精确位置,并且,无需在自移动设备的地图中标注充电装置的精确位置,即使充电装置的位置发生改变,也
自移动设备的路径处理方法、及自移动设备.pdf
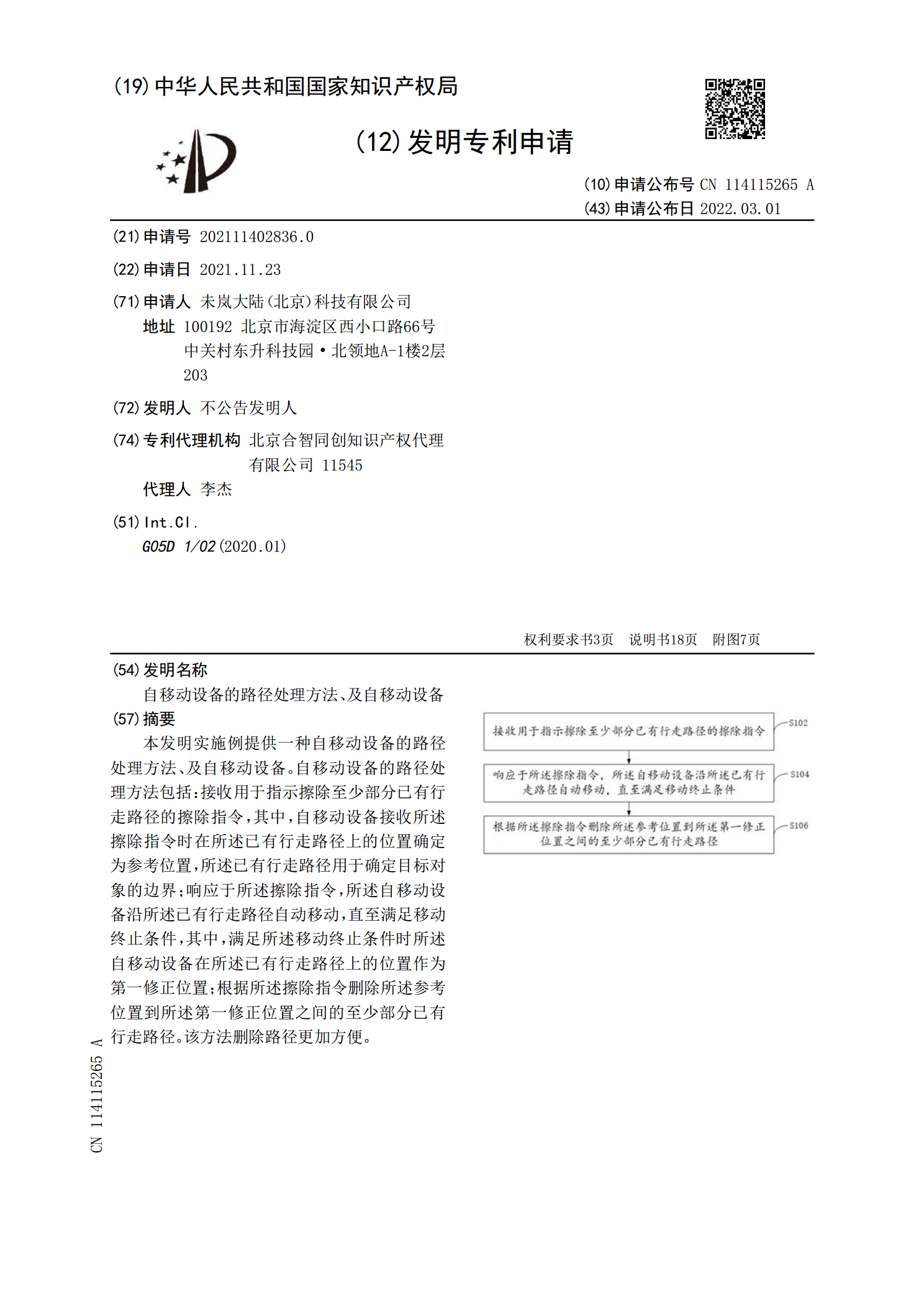
本发明实施例提供一种自移动设备的路径处理方法、及自移动设备。自移动设备的路径处理方法包括:接收用于指示擦除至少部分已有行走路径的擦除指令,其中,自移动设备接收所述擦除指令时在所述已有行走路径上的位置确定为参考位置,所述已有行走路径用于确定目标对象的边界;响应于所述擦除指令,所述自移动设备沿所述已有行走路径自动移动,直至满足移动终止条件,其中,满足所述移动终止条件时所述自移动设备在所述已有行走路径上的位置作为第一修正位置;根据所述擦除指令删除所述参考位置到所述第一修正位置之间的至少部分已有行走路径。该方法删
自移动设备、设备主体及其控制方法.pdf
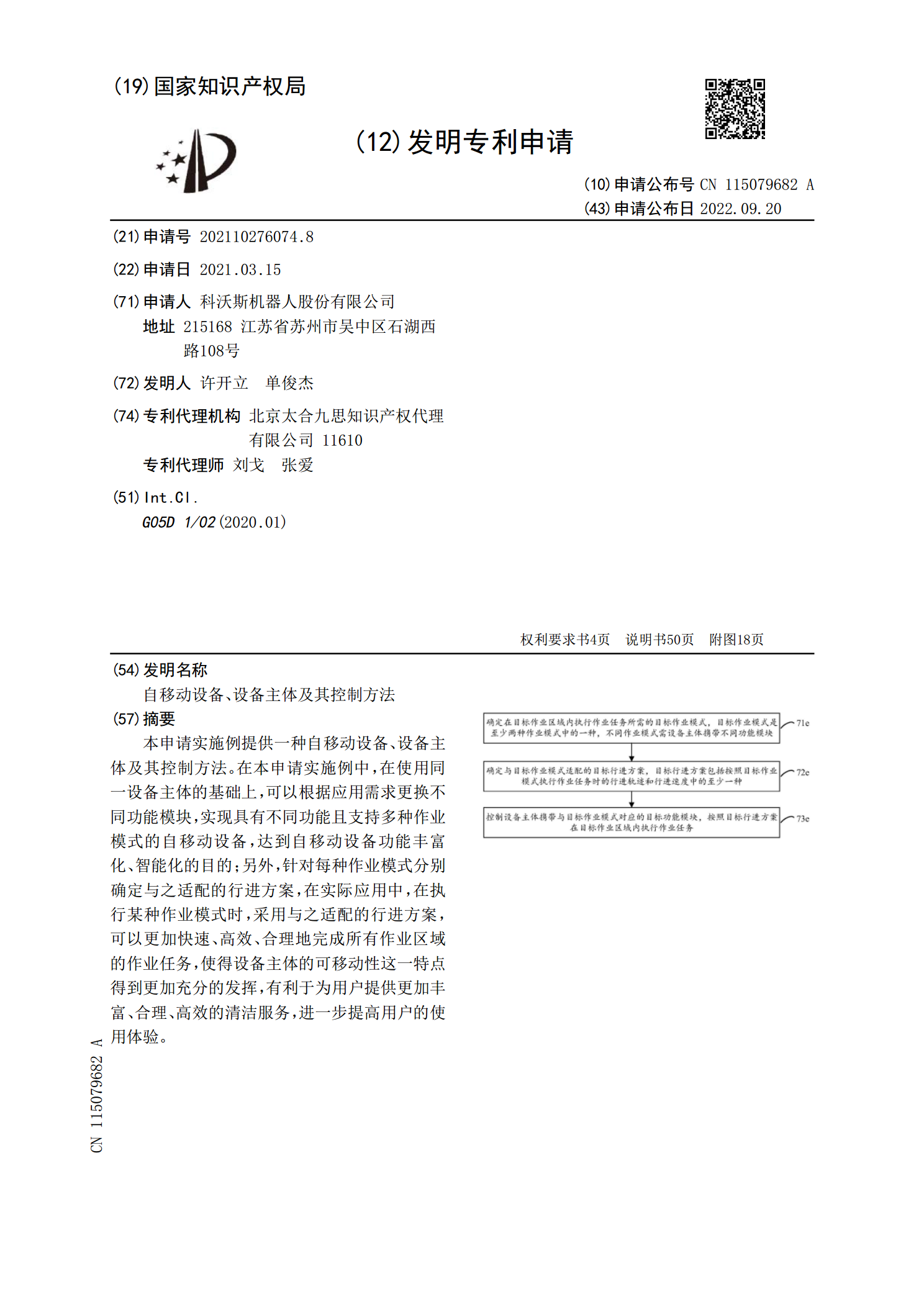
本申请实施例提供一种自移动设备、设备主体及其控制方法。在本申请实施例中,在使用同一设备主体的基础上,可以根据应用需求更换不同功能模块,实现具有不同功能且支持多种作业模式的自移动设备,达到自移动设备功能丰富化、智能化的目的;另外,针对每种作业模式分别确定与之适配的行进方案,在实际应用中,在执行某种作业模式时,采用与之适配的行进方案,可以更加快速、高效、合理地完成所有作业区域的作业任务,使得设备主体的可移动性这一特点得到更加充分的发挥,有利于为用户提供更加丰富、合理、高效的清洁服务,进一步提高用户的使用体验。