
自移动设备的路径处理方法、及自移动设备.pdf

一吃****继勇


1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自移动设备的路径处理方法、及自移动设备.pdf
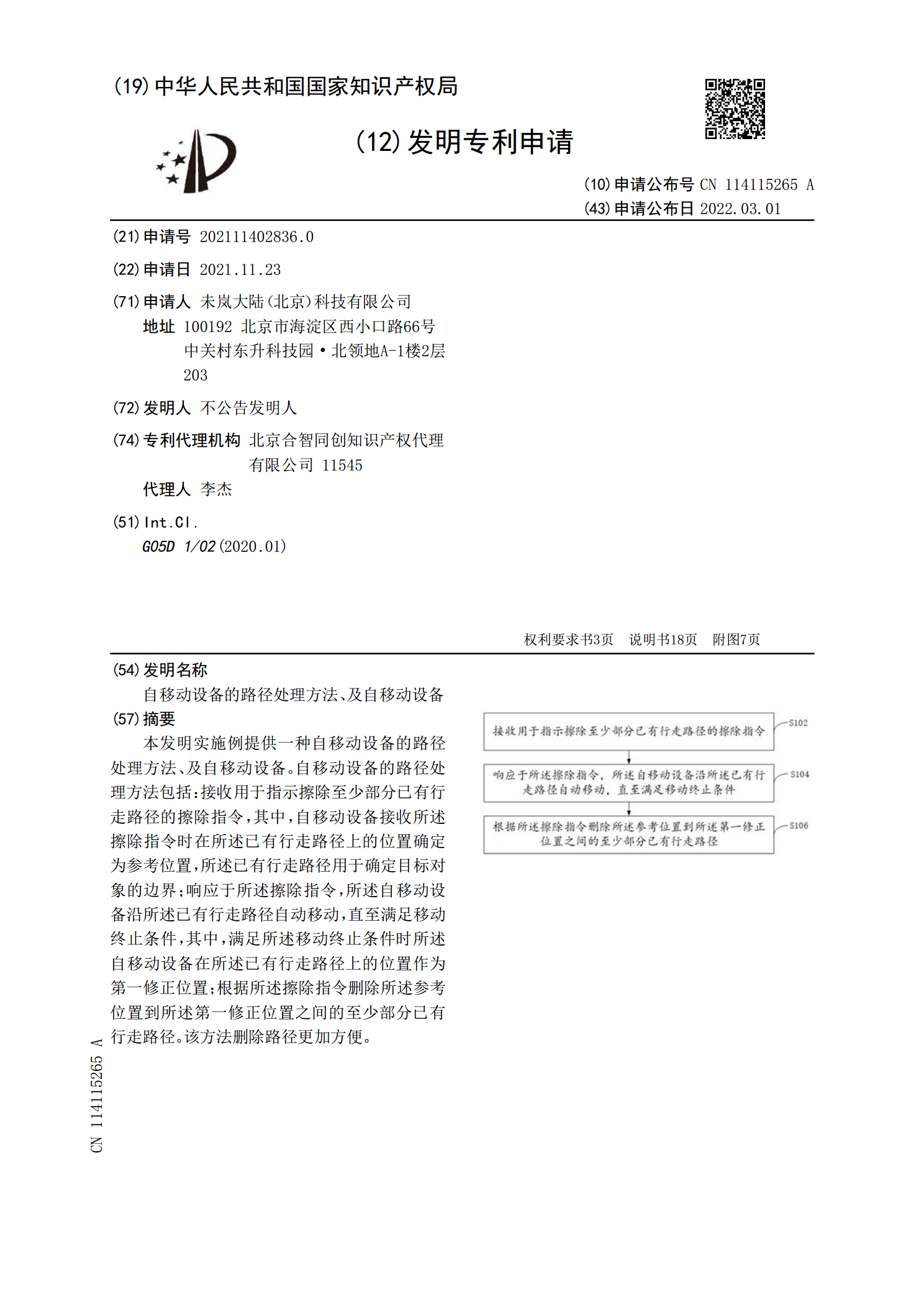
本发明实施例提供一种自移动设备的路径处理方法、及自移动设备。自移动设备的路径处理方法包括:接收用于指示擦除至少部分已有行走路径的擦除指令,其中,自移动设备接收所述擦除指令时在所述已有行走路径上的位置确定为参考位置,所述已有行走路径用于确定目标对象的边界;响应于所述擦除指令,所述自移动设备沿所述已有行走路径自动移动,直至满足移动终止条件,其中,满足所述移动终止条件时所述自移动设备在所述已有行走路径上的位置作为第一修正位置;根据所述擦除指令删除所述参考位置到所述第一修正位置之间的至少部分已有行走路径。该方法删

一种自移动设备选区处理方法及自移动设备.pdf
本申请实施例提供了一种自移动设备选区处理方法及自移动设备,该自移动设备选区处理方法包括:展示待处理区域的初始地图作为当前层次地图;获取用户在所述当前层次地图上做出的当前选择指令;若所述当前选择指令的指令含义为进入下一层次地图,则根据所述当前选择指令确定被选择区域,并根据所述被选择区域更新所述当前层次地图并展示,并返回所述获取用户在所述当前层次地图做出的当前选择指令的步骤;若所述当前选择指令的指令含义为进入处理状态,则根据所述当前选择指令确定的被选择区域,对所述被选择区域进行处理。该自移动设备选区处理方法,

自移动设备的避障控制方法及自移动设备.pdf
本发明揭示了一种自移动设备的避障控制方法,S1:将自移动设备的行走路径分割为N个动作,并预设自移动设备完成每个动作所需持续时间阈值;且,N>1;S2:自移动设备以任一动作为当前动作运动;S3:判断当前动作是否处于异常状态,若处于异常状态则执行步骤S4;若未处于异常状态则返回步骤S2;S4:检测当前动作持续时间是否满足对应动作的时间阈值,如果是则自移动设备执行步骤S5;如果否则返回步骤S2;S5:执行下一动作,并返回步骤S2;S6:重复步骤S2至S5,直到自移动设备完成行走路径或停止工作。本发明还提供一种自
自移动设备的控制方法、装置、自移动设备和介质.pdf
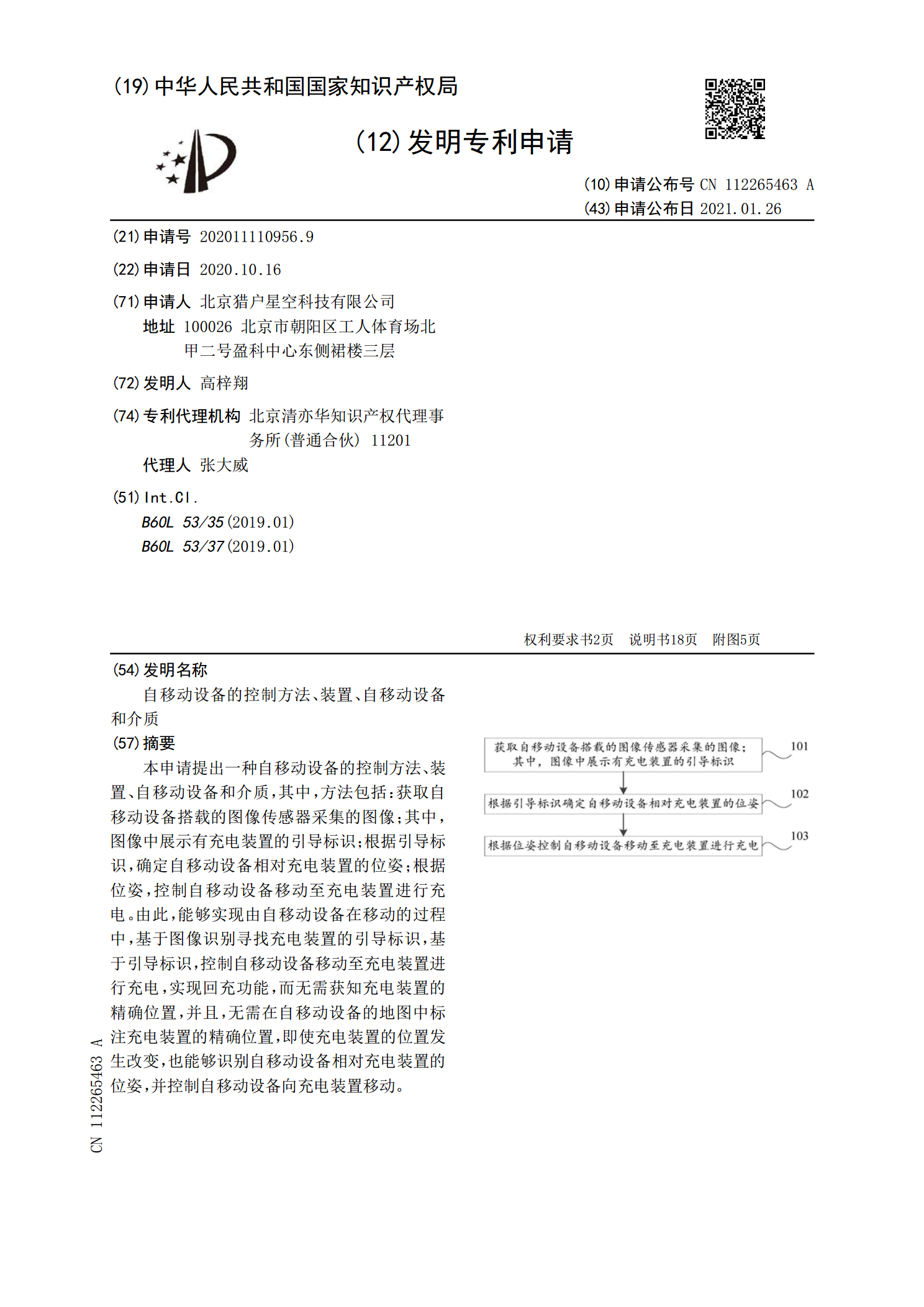
本申请提出一种自移动设备的控制方法、装置、自移动设备和介质,其中,方法包括:获取自移动设备搭载的图像传感器采集的图像;其中,图像中展示有充电装置的引导标识;根据引导标识,确定自移动设备相对充电装置的位姿;根据位姿,控制自移动设备移动至充电装置进行充电。由此,能够实现由自移动设备在移动的过程中,基于图像识别寻找充电装置的引导标识,基于引导标识,控制自移动设备移动至充电装置进行充电,实现回充功能,而无需获知充电装置的精确位置,并且,无需在自移动设备的地图中标注充电装置的精确位置,即使充电装置的位置发生改变,也

自移动设备回归路径控制方法和系统.pdf
本发明涉及一种自移动设备回归路径控制方法和系统,所述方法包括检测自移动设备是否需要回归至回归站;当自移动设备需要回归至回归站时,断开边界线与回归站形成的回路;控制所述自移动设备沿断开的边界线向所述回归站回归,并动态调整自移动设备与断开的边界线之间的距离。通过所述方法和系统动态调整自移动设备与断开的边界线之间的距离,从而使得自移动设备每次回归至回归站的路径均不相同,从而自移动设备不会在边界线周围留下轮印,保持了工作区域的美观。