
自移动设备的避障方法、装置以及避障设备.pdf

小代****回来

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自移动设备的避障方法、装置以及避障设备.pdf
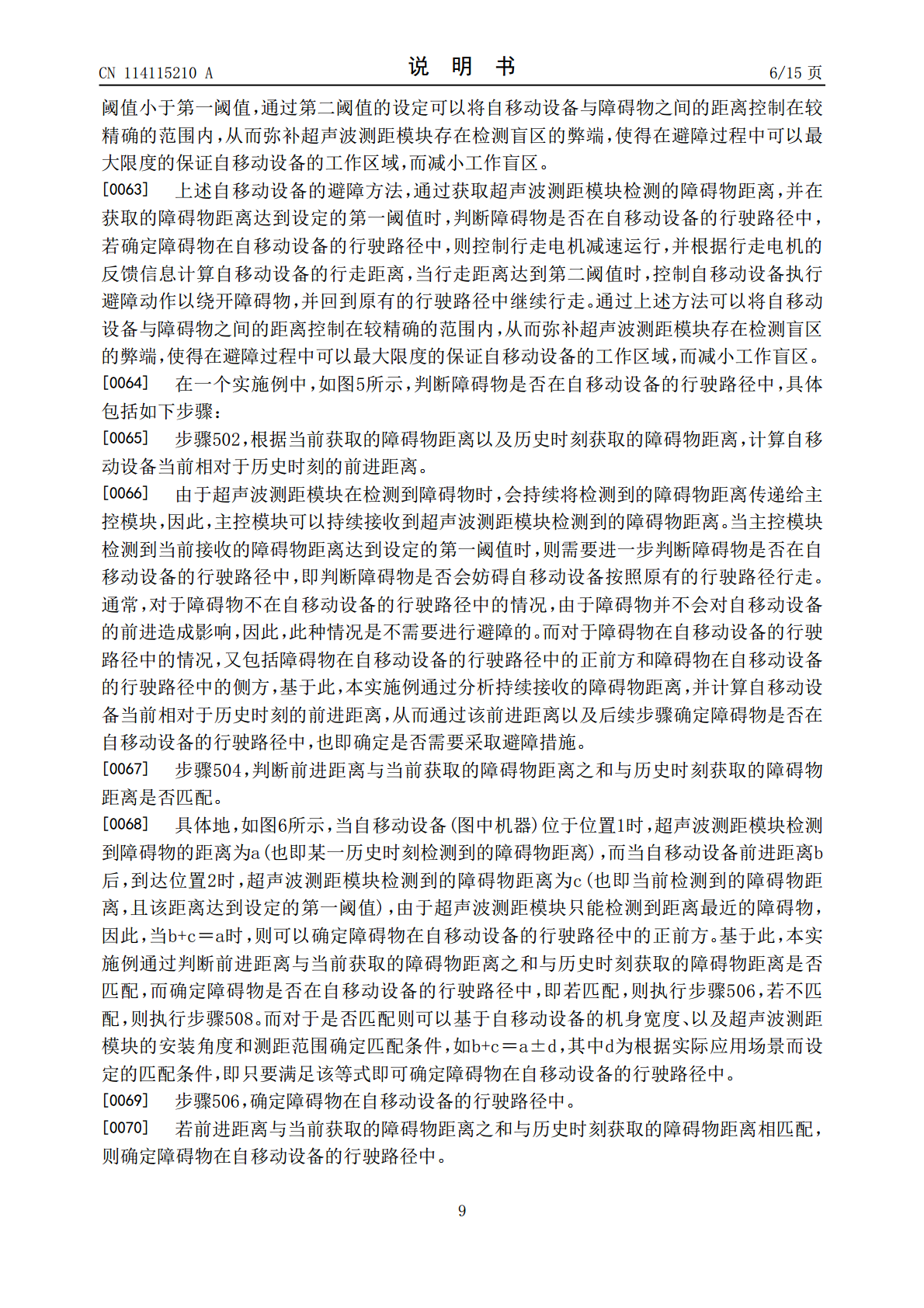
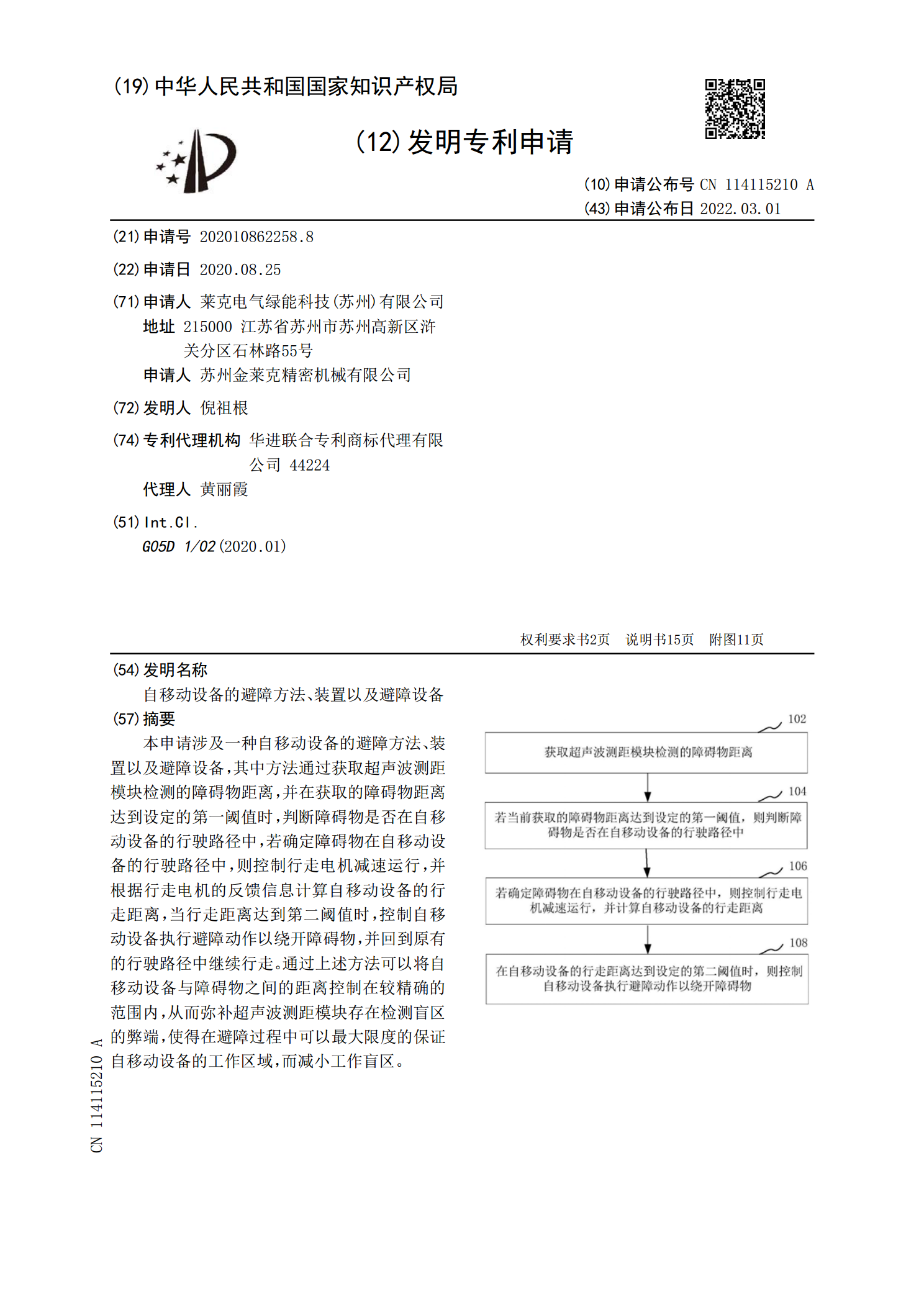
本申请涉及一种自移动设备的避障方法、装置以及避障设备,其中方法通过获取超声波测距模块检测的障碍物距离,并在获取的障碍物距离达到设定的第一阈值时,判断障碍物是否在自移动设备的行驶路径中,若确定障碍物在自移动设备的行驶路径中,则控制行走电机减速运行,并根据行走电机的反馈信息计算自移动设备的行走距离,当行走距离达到第二阈值时,控制自移动设备执行避障动作以绕开障碍物,并回到原有的行驶路径中继续行走。通过上述方法可以将自移动设备与障碍物之间的距离控制在较精确的范围内,从而弥补超声波测距模块存在检测盲区的弊端,使得在

自移动设备的避障控制方法及自移动设备.pdf
本发明揭示了一种自移动设备的避障控制方法,S1:将自移动设备的行走路径分割为N个动作,并预设自移动设备完成每个动作所需持续时间阈值;且,N>1;S2:自移动设备以任一动作为当前动作运动;S3:判断当前动作是否处于异常状态,若处于异常状态则执行步骤S4;若未处于异常状态则返回步骤S2;S4:检测当前动作持续时间是否满足对应动作的时间阈值,如果是则自移动设备执行步骤S5;如果否则返回步骤S2;S5:执行下一动作,并返回步骤S2;S6:重复步骤S2至S5,直到自移动设备完成行走路径或停止工作。本发明还提供一种自
一种移动物的避障方法、装置、设备及产品.pdf
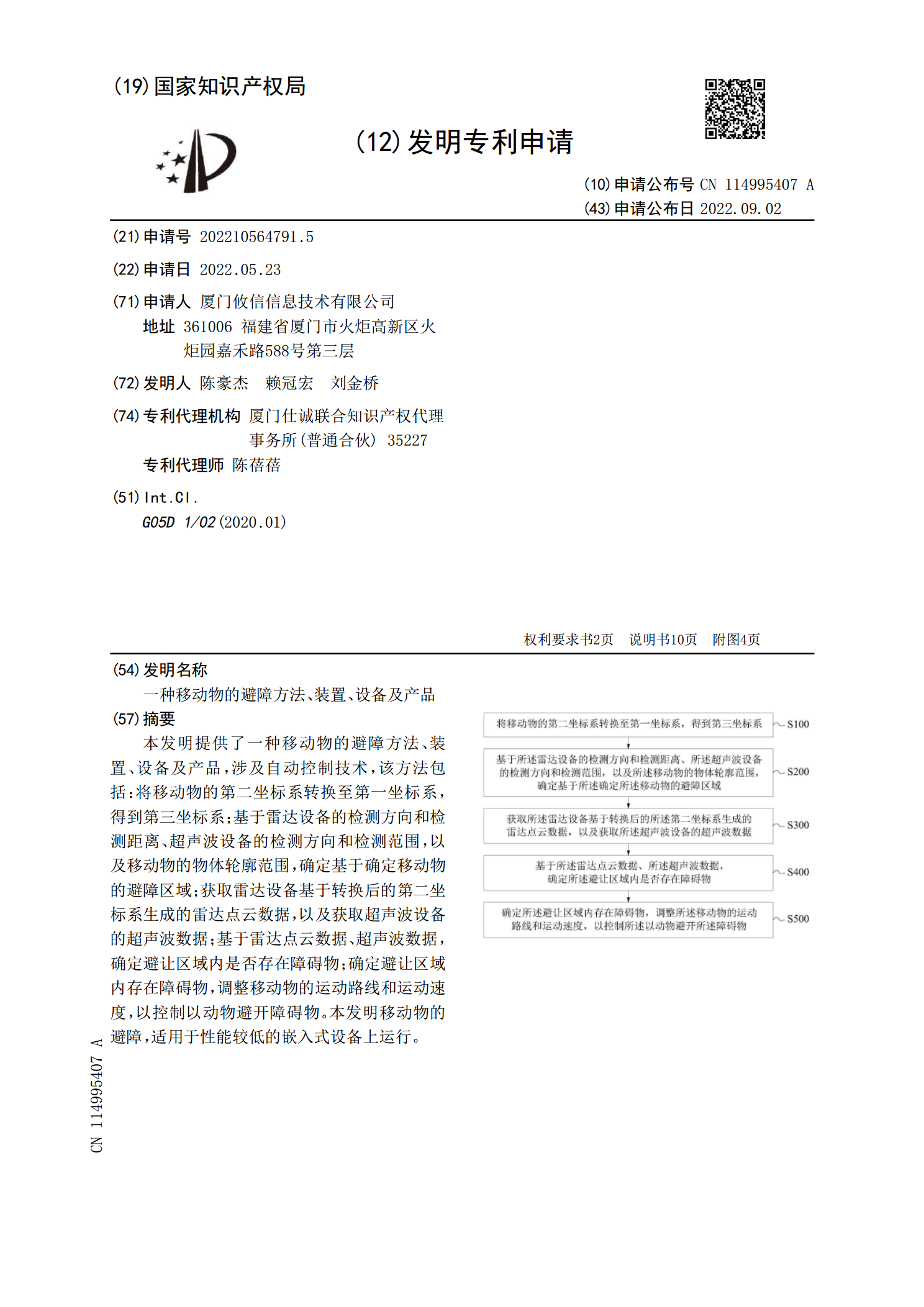
本发明提供了一种移动物的避障方法、装置、设备及产品,涉及自动控制技术,该方法包括:将移动物的第二坐标系转换至第一坐标系,得到第三坐标系;基于雷达设备的检测方向和检测距离、超声波设备的检测方向和检测范围,以及移动物的物体轮廓范围,确定基于确定移动物的避障区域;获取雷达设备基于转换后的第二坐标系生成的雷达点云数据,以及获取超声波设备的超声波数据;基于雷达点云数据、超声波数据,确定避让区域内是否存在障碍物;确定避让区域内存在障碍物,调整移动物的运动路线和运动速度,以控制以动物避开障碍物。本发明移动物的避障,适用

一种智能移动设备的导航避障方法及装置.pdf
本发明公开了一种智能移动设备的导航避障方法及装置,该方法包括:利用二维测距传感器对智能移动设备所处环境进行遍历扫描,得到二维环境地图;获取三维深度摄像头在智能移动设备所处环境的不同位置采集到的三维环境数据,并将三维环境数据与二维环境地图融合,得到综合环境地图;接收外界输入的目标位置指令,基于智能移动设备的当前位置及综合环境地图规划出避障路线,并控制智能移动设备按照避障路线到达与目标位置指令对应的目标位置。该技术方案避免了现有技术提供的技术方案中存在的由于二维测距传感器只能检测到特定高度平面的物体存在情况,

车辆侧向避障方法、装置、设备及车辆.pdf
本发明实施例公开了一种车辆侧向避障方法、装置、设备及车辆。包括:基于全局坐标系构建障碍物地图;所述障碍物地图为网格化地图;根据车辆侧面的超声波雷达采集的数据确定第一障碍物信息;将所述第一障碍物信息转化至所述障碍物地图中,获得第二障碍物信息;根据车辆的运行信息更新所述第二障碍物信息;根据更新后所述第二障碍物信息产生提醒信息,以提醒驾驶员侧方的障碍物。本发明实施例公开的车辆侧向避障方法,根据车辆的运行信息更新第二障碍物信息,使得驾驶员可以获取到超声波雷达盲区内的障碍物信息,从而进行避障,提高车辆行驶的安全性。