
路径规划方法及装置.pdf

曾琪****是我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
路径规划方法及装置.pdf
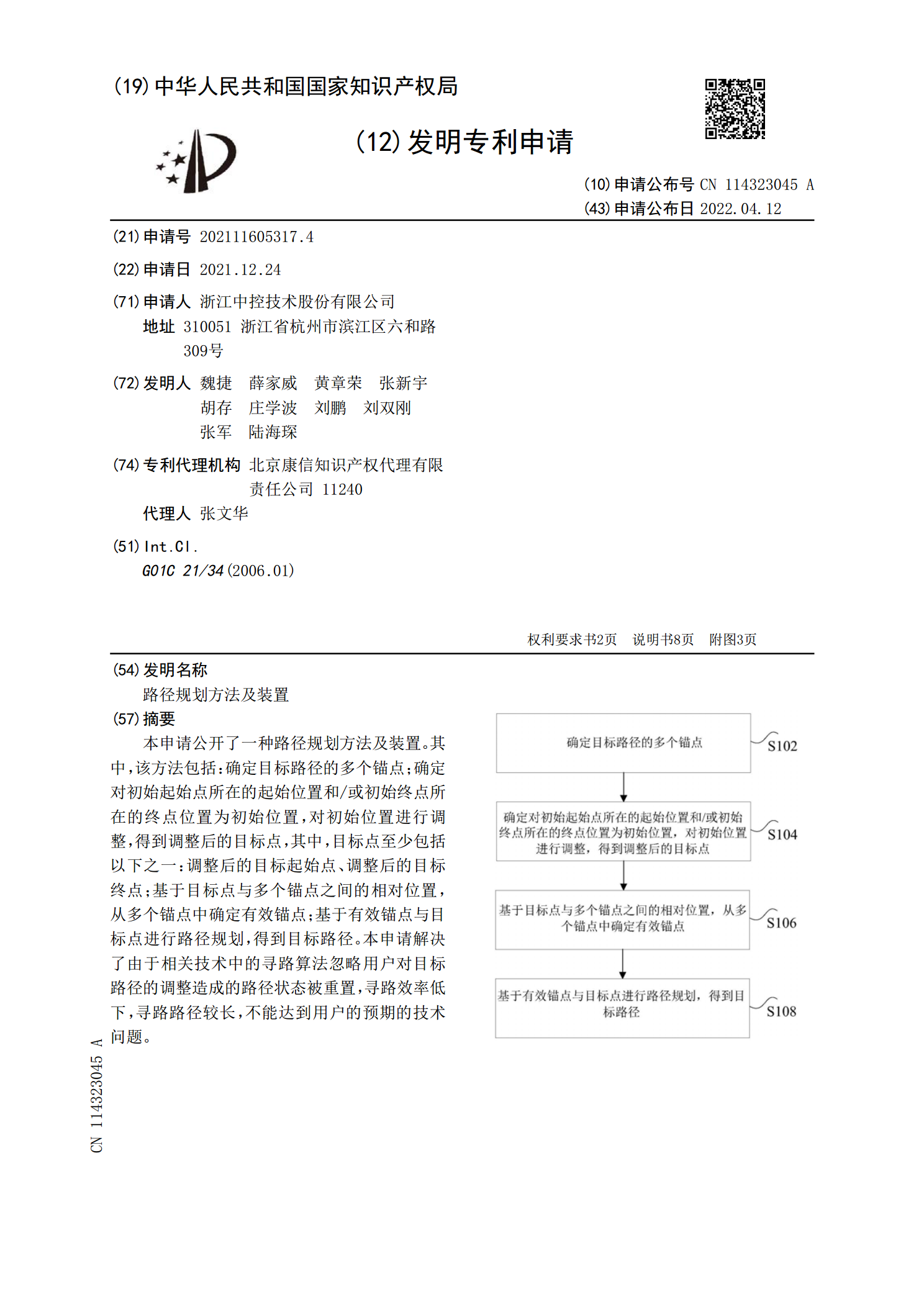
本申请公开了一种路径规划方法及装置。其中,该方法包括:确定目标路径的多个锚点;确定对初始起始点所在的起始位置和/或初始终点所在的终点位置为初始位置,对初始位置进行调整,得到调整后的目标点,其中,目标点至少包括以下之一:调整后的目标起始点、调整后的目标终点;基于目标点与多个锚点之间的相对位置,从多个锚点中确定有效锚点;基于有效锚点与目标点进行路径规划,得到目标路径。本申请解决了由于相关技术中的寻路算法忽略用户对目标路径的调整造成的路径状态被重置,寻路效率低下,寻路路径较长,不能达到用户的预期的技术问题。

路径规划方法及装置.pdf
本发明公开了一种路径规划方法及装置。其中,该方法包括:确定栅格地图,其中,栅格地图是对机器人的运行地图进行栅格划分后得到的地图,栅格地图中包括多个栅格;获取栅格临时占用表,其中,栅格临时占用表用于存放栅格的坐标信息和每个机器人在不同时刻对栅格的占用信息;依据栅格临时占用表,确定机器人从起点到达目标点的目标行进路径,其中,目标行进路径至少包括:到达每个栅格的时间以及在栅格的停留时长。本发明解决了相关技术中无法解决多个机器人在地图上行走时容易发生碰撞的技术问题。
路径规划装置、路径规划方法以及路径规划系统.pdf
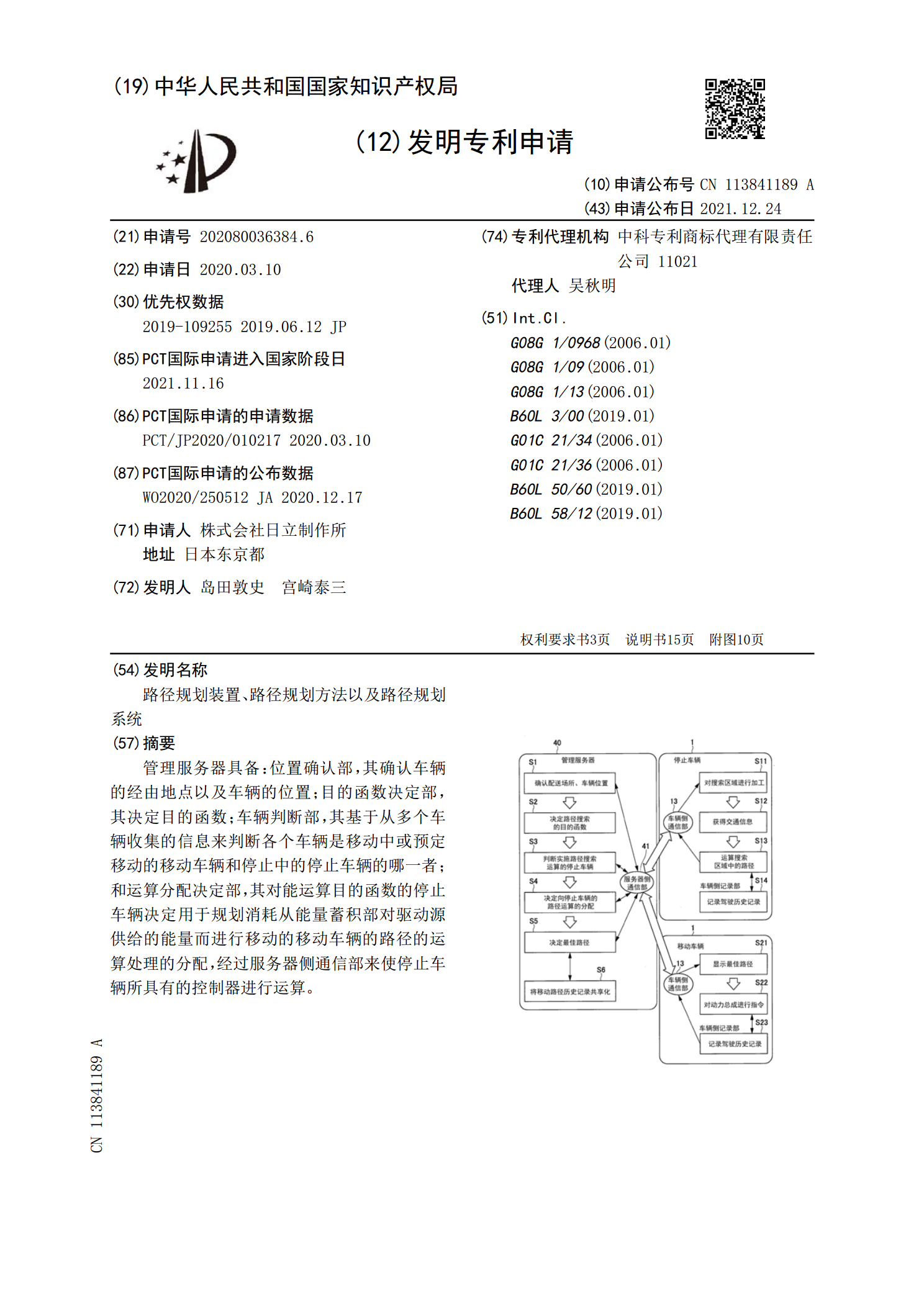
管理服务器具备:位置确认部,其确认车辆的经由地点以及车辆的位置;目的函数决定部,其决定目的函数;车辆判断部,其基于从多个车辆收集的信息来判断各个车辆是移动中或预定移动的移动车辆和停止中的停止车辆的哪一者;和运算分配决定部,其对能运算目的函数的停止车辆决定用于规划消耗从能量蓄积部对驱动源供给的能量而进行移动的移动车辆的路径的运算处理的分配,经过服务器侧通信部来使停止车辆所具有的控制器进行运算。
路径规划方法、装置及系统.pdf
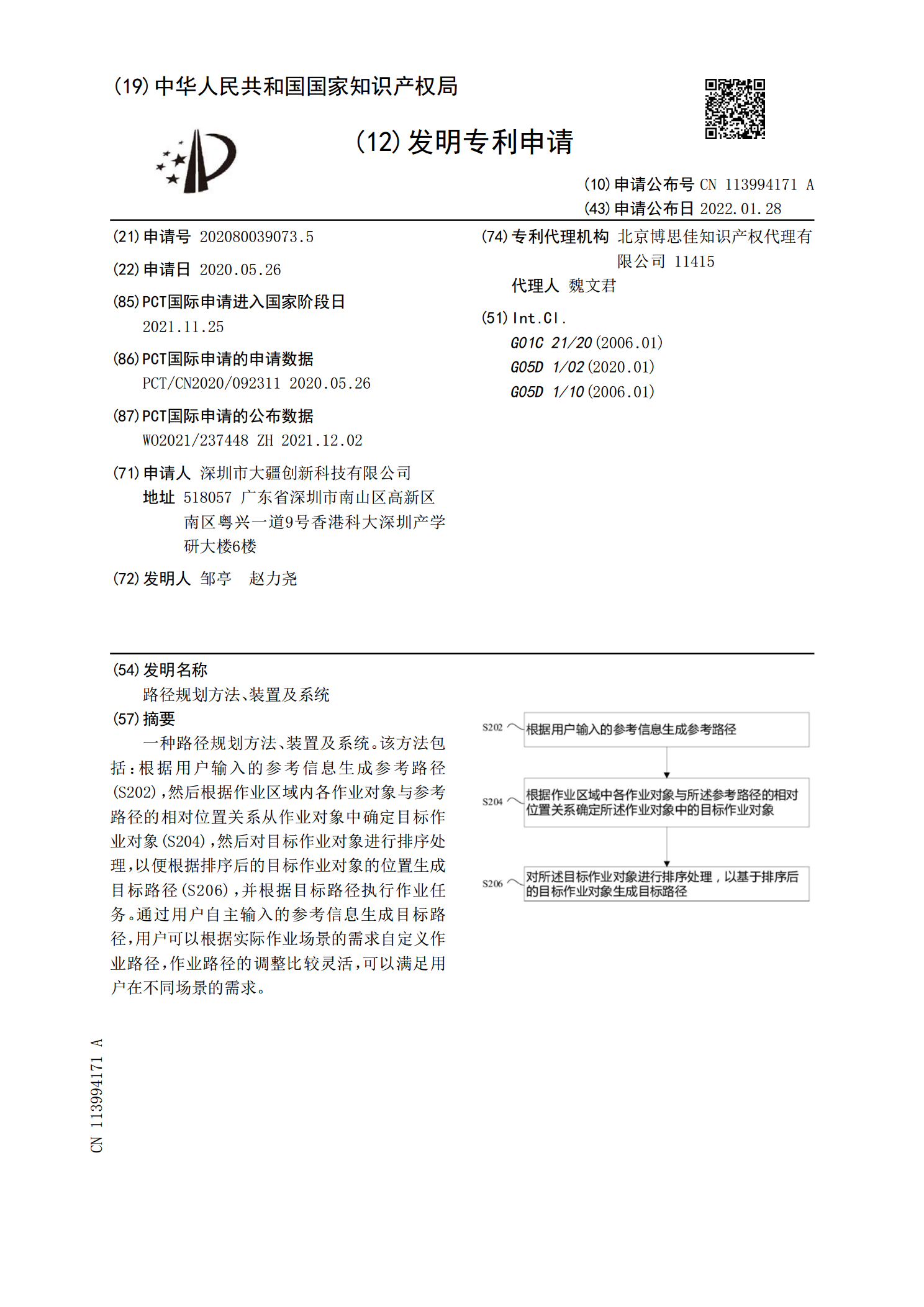
一种路径规划方法、装置及系统。该方法包括:根据用户输入的参考信息生成参考路径(S202),然后根据作业区域内各作业对象与参考路径的相对位置关系从作业对象中确定目标作业对象(S204),然后对目标作业对象进行排序处理,以便根据排序后的目标作业对象的位置生成目标路径(S206),并根据目标路径执行作业任务。通过用户自主输入的参考信息生成目标路径,用户可以根据实际作业场景的需求自定义作业路径,作业路径的调整比较灵活,可以满足用户在不同场景的需求。
路径规划方法和装置.pdf
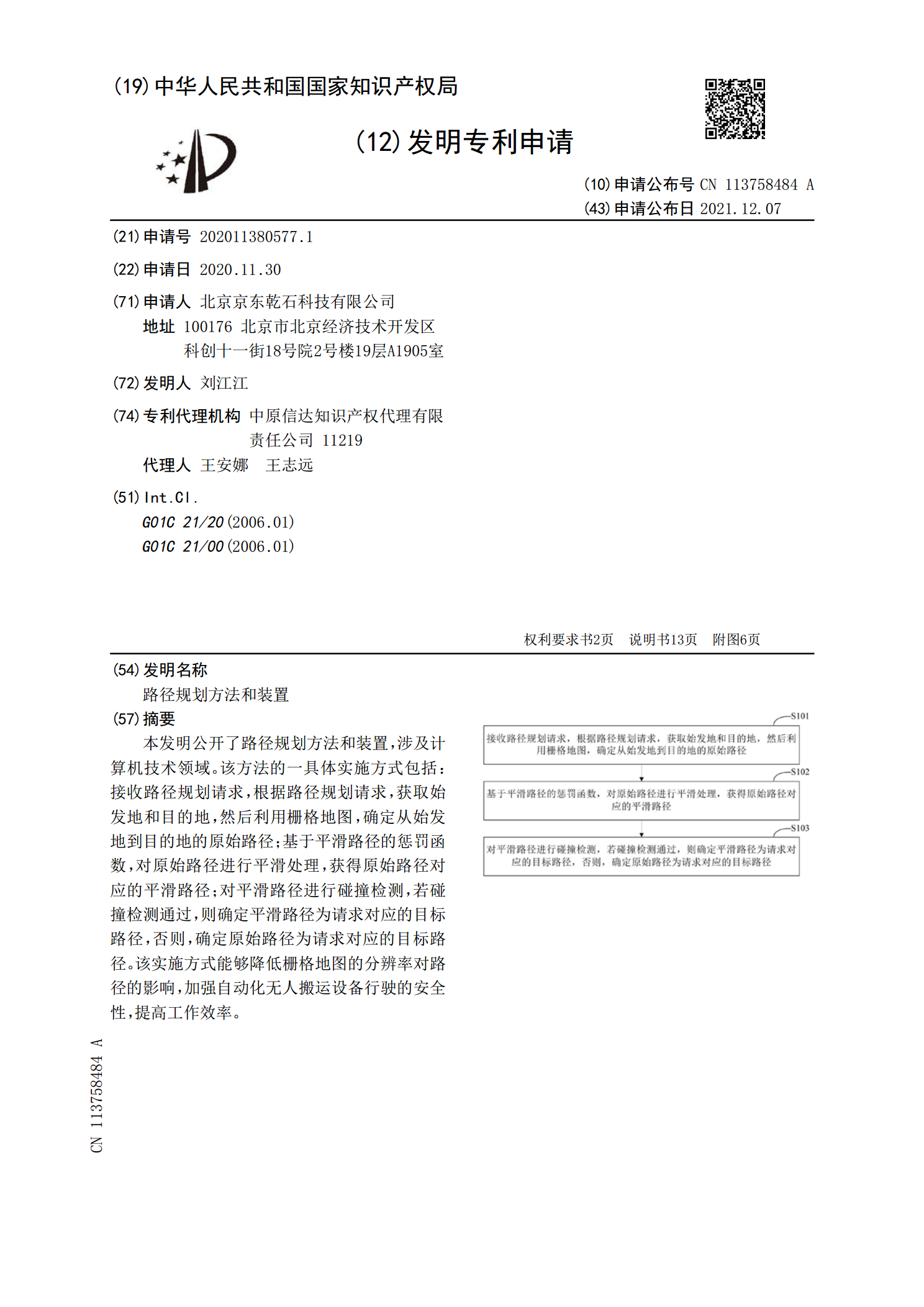
本发明公开了路径规划方法和装置,涉及计算机技术领域。该方法的一具体实施方式包括:接收路径规划请求,根据路径规划请求,获取始发地和目的地,然后利用栅格地图,确定从始发地到目的地的原始路径;基于平滑路径的惩罚函数,对原始路径进行平滑处理,获得原始路径对应的平滑路径;对平滑路径进行碰撞检测,若碰撞检测通过,则确定平滑路径为请求对应的目标路径,否则,确定原始路径为请求对应的目标路径。该实施方式能够降低栅格地图的分辨率对路径的影响,加强自动化无人搬运设备行驶的安全性,提高工作效率。