
路径规划方法和装置.pdf

Ch****75

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
路径规划方法和装置.pdf
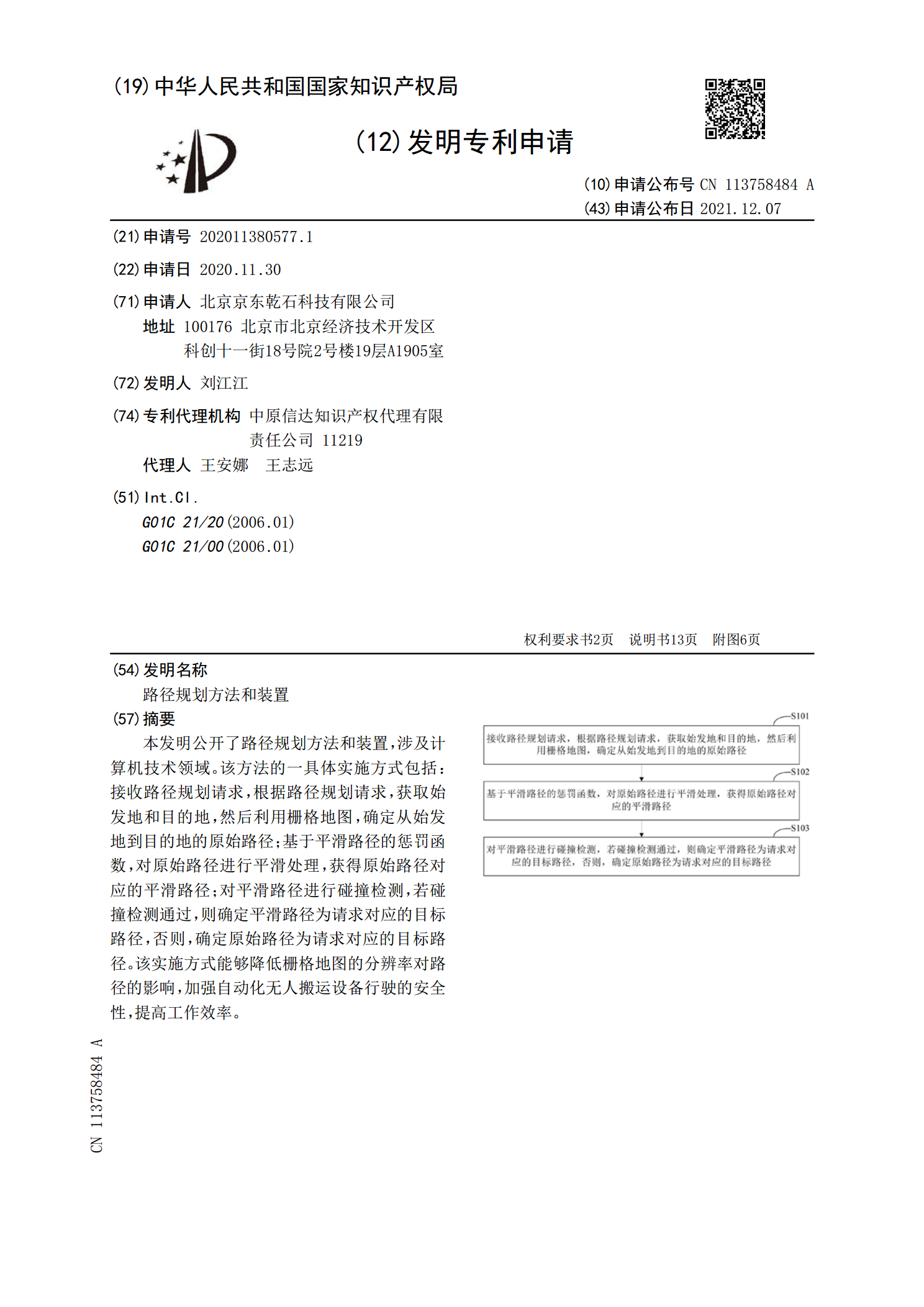
本发明公开了路径规划方法和装置,涉及计算机技术领域。该方法的一具体实施方式包括:接收路径规划请求,根据路径规划请求,获取始发地和目的地,然后利用栅格地图,确定从始发地到目的地的原始路径;基于平滑路径的惩罚函数,对原始路径进行平滑处理,获得原始路径对应的平滑路径;对平滑路径进行碰撞检测,若碰撞检测通过,则确定平滑路径为请求对应的目标路径,否则,确定原始路径为请求对应的目标路径。该实施方式能够降低栅格地图的分辨率对路径的影响,加强自动化无人搬运设备行驶的安全性,提高工作效率。
路径规划方法和装置.pdf
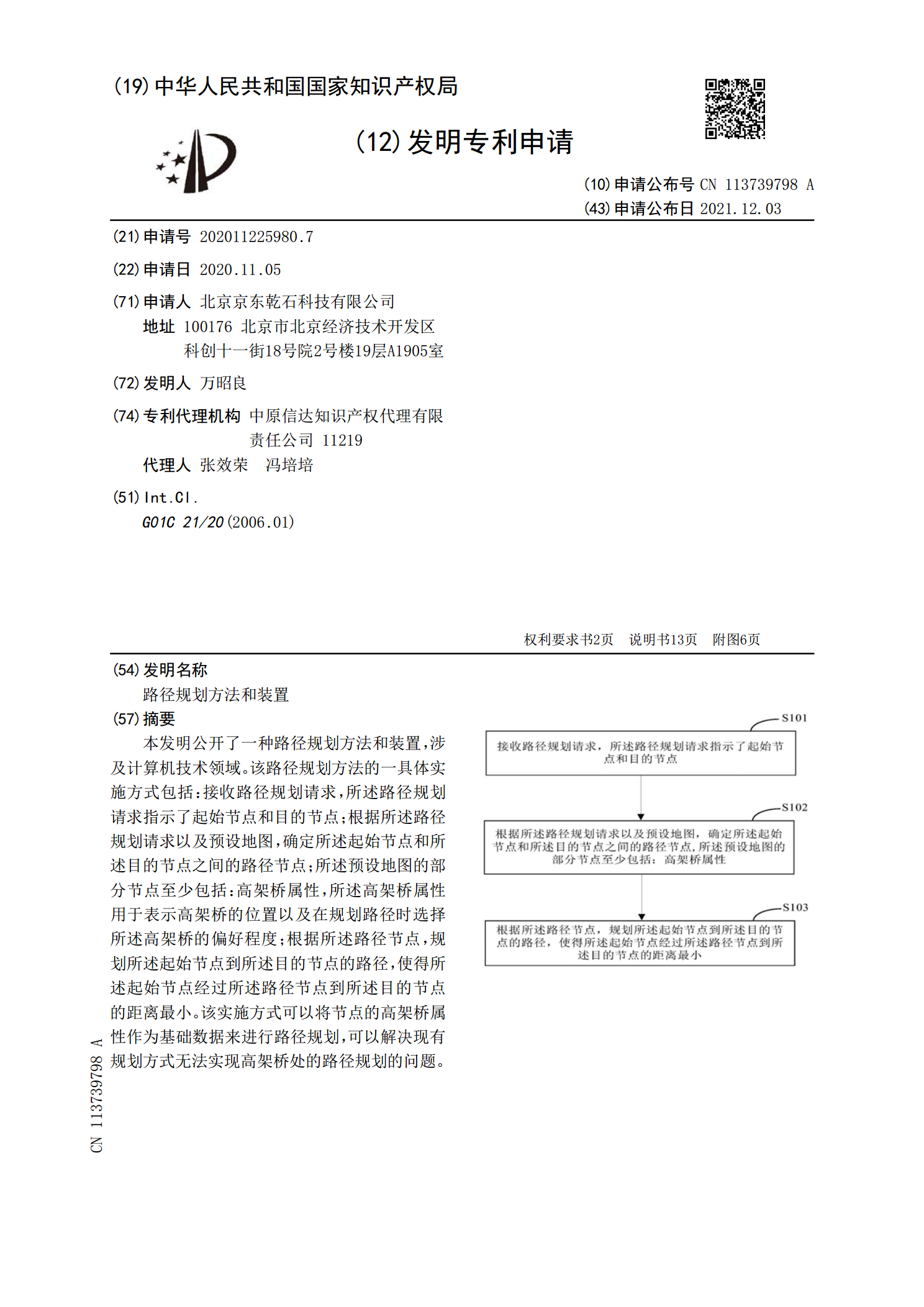
本发明公开了一种路径规划方法和装置,涉及计算机技术领域。该路径规划方法的一具体实施方式包括:接收路径规划请求,所述路径规划请求指示了起始节点和目的节点;根据所述路径规划请求以及预设地图,确定所述起始节点和所述目的节点之间的路径节点;所述预设地图的部分节点至少包括:高架桥属性,所述高架桥属性用于表示高架桥的位置以及在规划路径时选择所述高架桥的偏好程度;根据所述路径节点,规划所述起始节点到所述目的节点的路径,使得所述起始节点经过所述路径节点到所述目的节点的距离最小。该实施方式可以将节点的高架桥属性作为基础数据

工程机械入场路径规划方法和路径规划装置.pdf
本发明提供了一种工程机械入场路径规划方法和路径规划装置。该工程机械的入场路径规划方法包括:将入场区域内的障碍物的三维模型投影到水平面上,得到障碍物的二维投影轮廓;利用二维投影轮廓分别计算每两个相邻障碍物之间的最短连线,并标记最短连线的中点;计算工程机械经由最短连线的中点到达目标位置的各条路径,并对所述各条路径进行路径规划计算;分别计算工程机械按照经过路径计算的各条路径入场需要行进的距离、转弯次数、和工程机械通过障碍物时与障碍物的最小距离;按照需要行进的距离、转弯次数、和工程机械通过障碍物时与障碍物的最小距
社区配送路径规划方法和装置.pdf
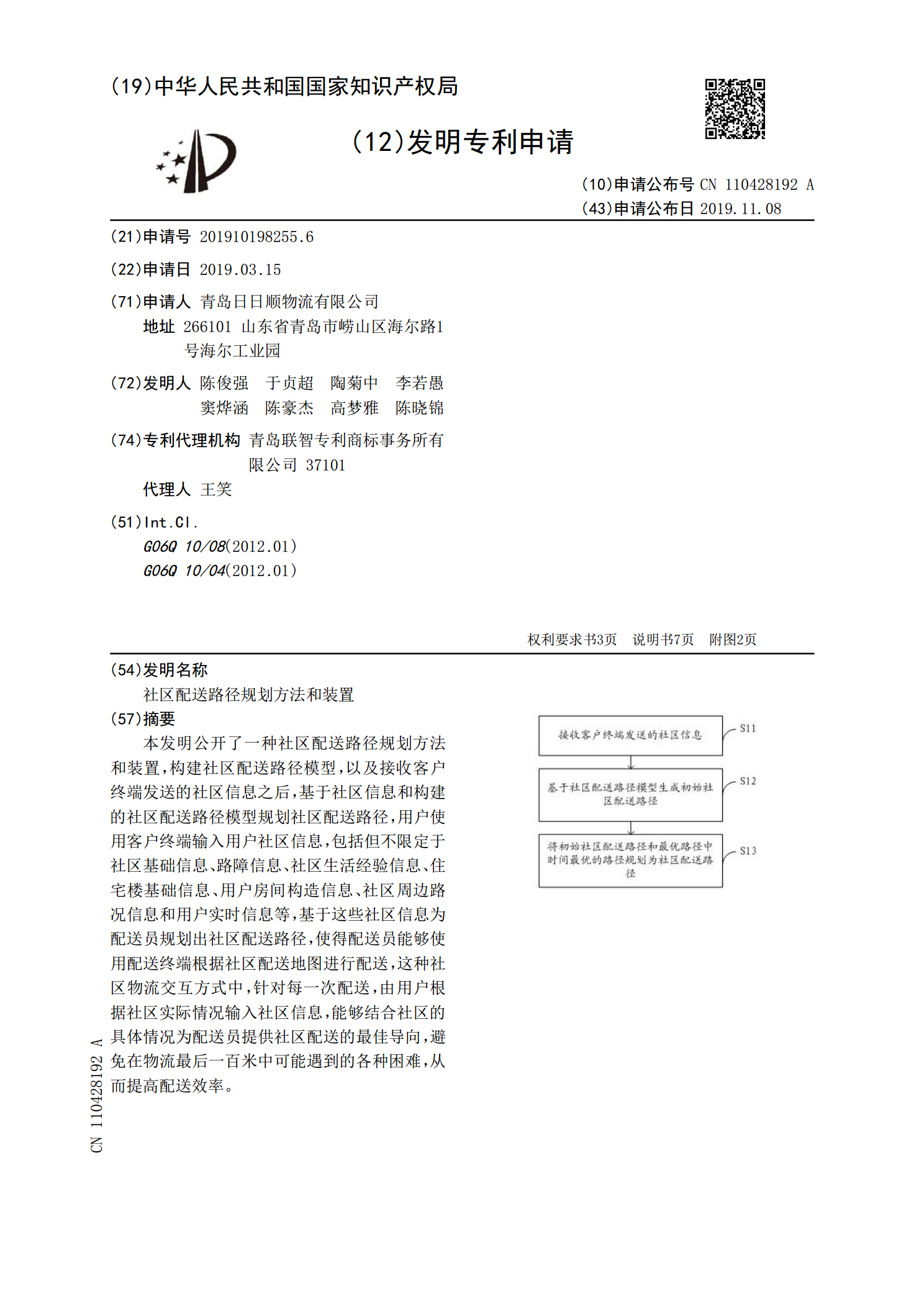
本发明公开了一种社区配送路径规划方法和装置,构建社区配送路径模型,以及接收客户终端发送的社区信息之后,基于社区信息和构建的社区配送路径模型规划社区配送路径,用户使用客户终端输入用户社区信息,包括但不限定于社区基础信息、路障信息、社区生活经验信息、住宅楼基础信息、用户房间构造信息、社区周边路况信息和用户实时信息等,基于这些社区信息为配送员规划出社区配送路径,使得配送员能够使用配送终端根据社区配送地图进行配送,这种社区物流交互方式中,针对每一次配送,由用户根据社区实际情况输入社区信息,能够结合社区的具体情况为
路径规划方法、装置、存储介质和电子装置.pdf
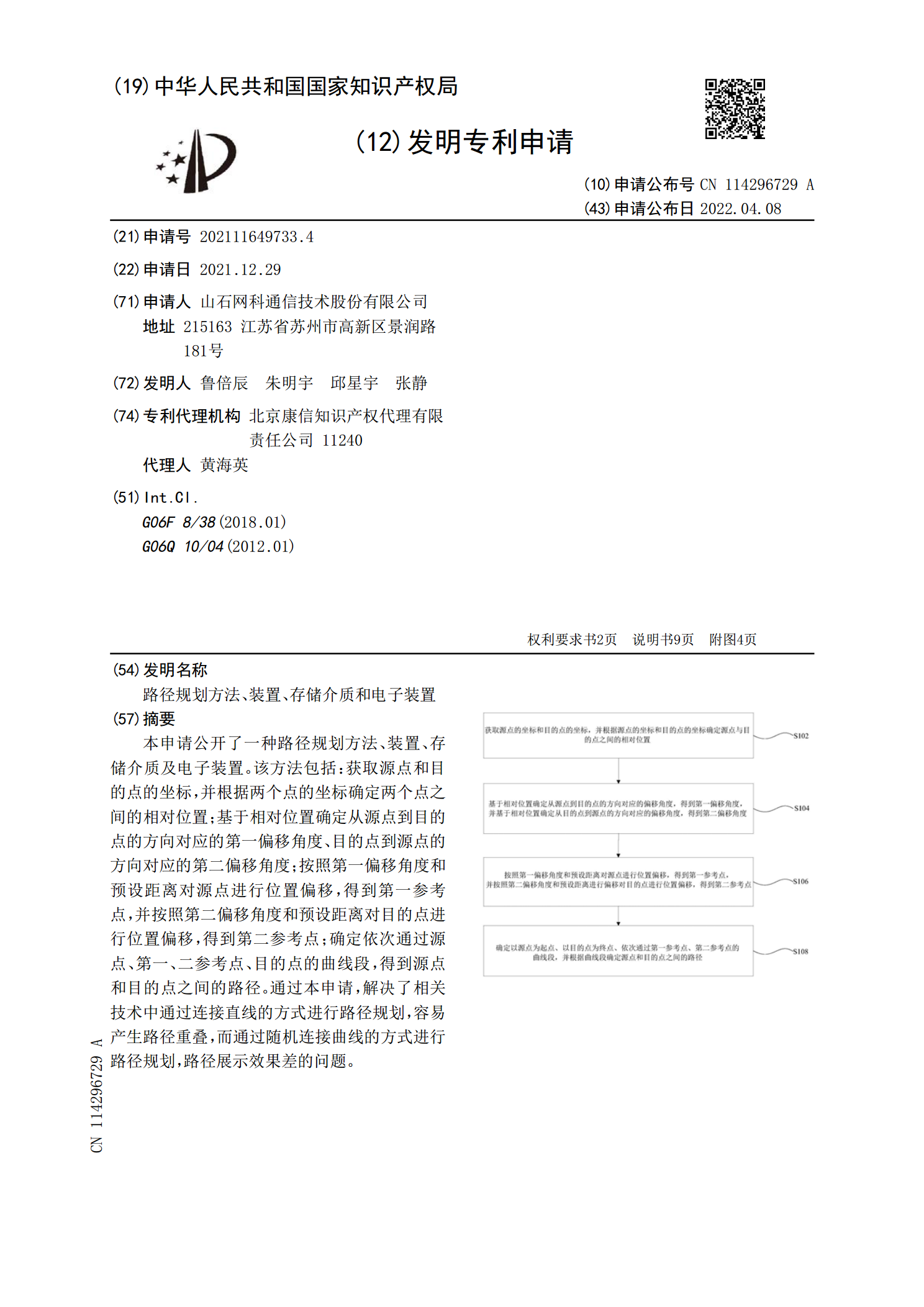
本申请公开了一种路径规划方法、装置、存储介质及电子装置。该方法包括:获取源点和目的点的坐标,并根据两个点的坐标确定两个点之间的相对位置;基于相对位置确定从源点到目的点的方向对应的第一偏移角度、目的点到源点的方向对应的第二偏移角度;按照第一偏移角度和预设距离对源点进行位置偏移,得到第一参考点,并按照第二偏移角度和预设距离对目的点进行位置偏移,得到第二参考点;确定依次通过源点、第一、二参考点、目的点的曲线段,得到源点和目的点之间的路径。通过本申请,解决了相关技术中通过连接直线的方式进行路径规划,容易产生路径重