
系留无人机精确降落控制系统及方法.pdf

春景****23


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

系留无人机精确降落控制系统及方法.pdf
一种系留无人机精确降落控制系统及方法,该系统包括:系留缆、张力传感器、系留收线电机、控制电路、无人机飞行控制模块和激光高度计,该控制方法,通过循环分阶段方式进行误差修正的方式一键降落。本发明利用系留无人机线缆结合线缆拉力控制、飞行控制模块以及无人机实时控制技术通过多重误差矫正来实现系留无人机在小平台上的高精度降落。本发明不依赖于GPS等卫星定位系统的前提下,减小起降平台面积,实现真正可便携的系留无人机系统。提高了系留无人机在实际应用中的可靠性和安全性。
系留无人机、系留无人机定位跟随控制系统及其控制方法.pdf
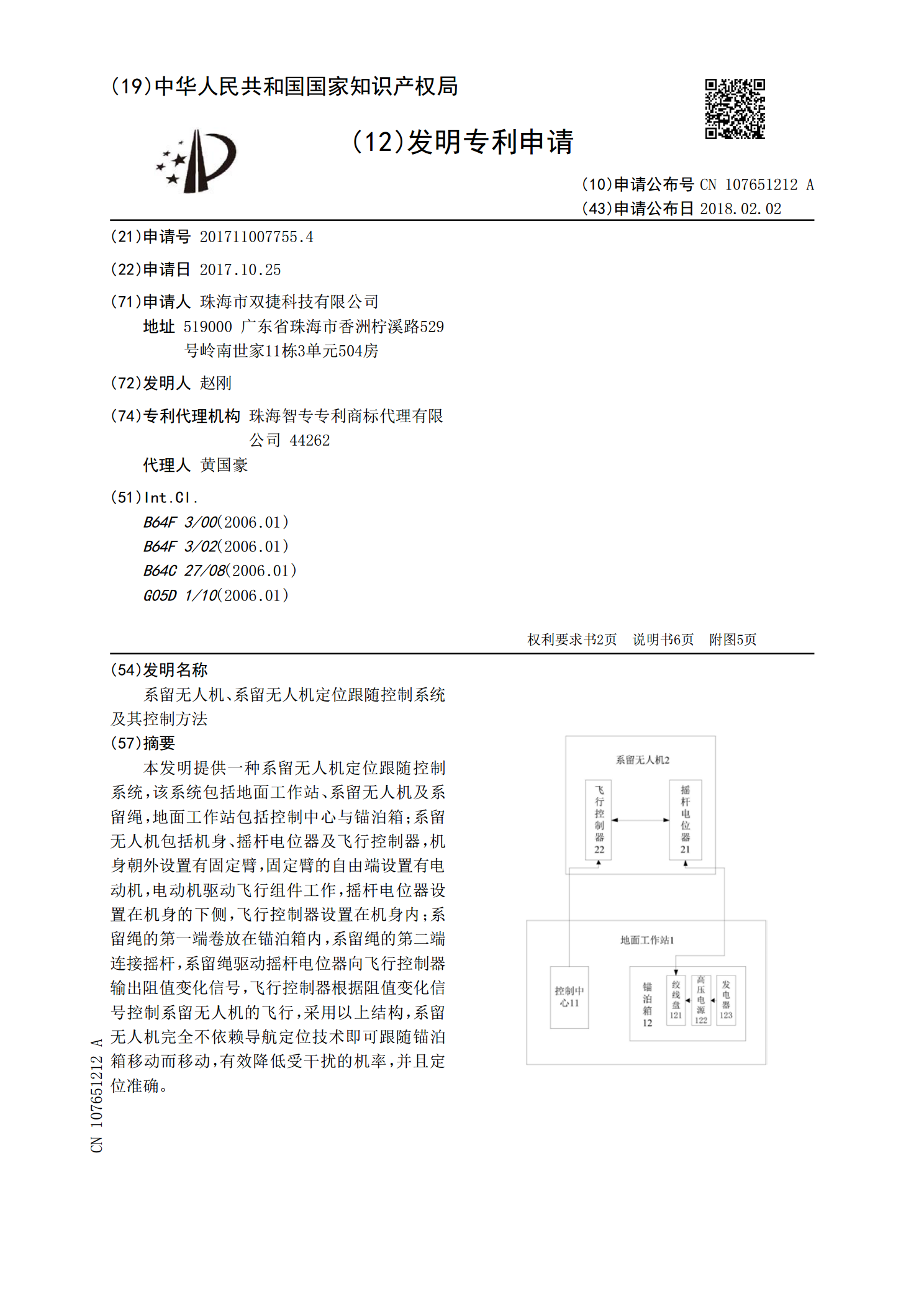
本发明提供一种系留无人机定位跟随控制系统,该系统包括地面工作站、系留无人机及系留绳,地面工作站包括控制中心与锚泊箱;系留无人机包括机身、摇杆电位器及飞行控制器,机身朝外设置有固定臂,固定臂的自由端设置有电动机,电动机驱动飞行组件工作,摇杆电位器设置在机身的下侧,飞行控制器设置在机身内;系留绳的第一端卷放在锚泊箱内,系留绳的第二端连接摇杆,系留绳驱动摇杆电位器向飞行控制器输出阻值变化信号,飞行控制器根据阻值变化信号控制系留无人机的飞行,采用以上结构,系留无人机完全不依赖导航定位技术即可跟随锚泊箱移动而移动,

一种系留无人机车载降落控制方法.pdf
本发明公开了一种系留无人机车载降落控制方法,包括:系留无人机接到降落指令后,先垂直爬升或下降到返航点,再水平返航到悬停点;在悬停点改变航向,使系留无人机机头方向与车载平台方向对正,接着下降到等待降落点并调整位置使系留无人机与平台对正,当对正误差连续几秒都在对正精度范围内时,控制系留无人机快速下降且在快速下降的过程中,不停计算对正误差,若误差大于降落误差时,系留无人机上升至等待降落点,重复对正至降落过程;当系留无人机快速下降到小于停桨高度时,系留无人机停桨,自由落体至车载平台;本发明使得大尺寸多旋翼飞机能够

一种系留无人机自动降落的调整方法、装置、设备与系统.pdf
本发明公开了一种系留无人机自动降落的调整方法、装置、设备与系统,其中方法包括获取无人机本体在降落时的实时高度数据;当所述实时高度数据大于预设阈值时,获取实时GPS定位数据;基于所述实时GPS定位数据对应调整无人机本体的实时位置;当所述实时高度数据小于或等于所述预设阈值时,获取连接线缆与无人机地面控制系统之间的实时角度变化数据;基于所述实时角度变化数据,对应调整无人机本体的实时位置。本发明实施例提供的系留无人机自动降落的调整方法、装置、设备与系统,通过结合GPS定位与相关角度变化,提高了系留无人机的自动降落

系留无人机跟随车载平台方法及使用该方法的系留无人机.pdf
本发明提供一种系留无人机精确跟随车载平台方法及使用其的系留无人机。其中,方法包括:安装于地面工作站的第一GPS接收机获取所述地面工作站的三维位置数据并解算出地面工作站的三维位置坐标P