
系留无人机、系留无人机定位跟随控制系统及其控制方法.pdf

岚风****55


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
系留无人机、系留无人机定位跟随控制系统及其控制方法.pdf
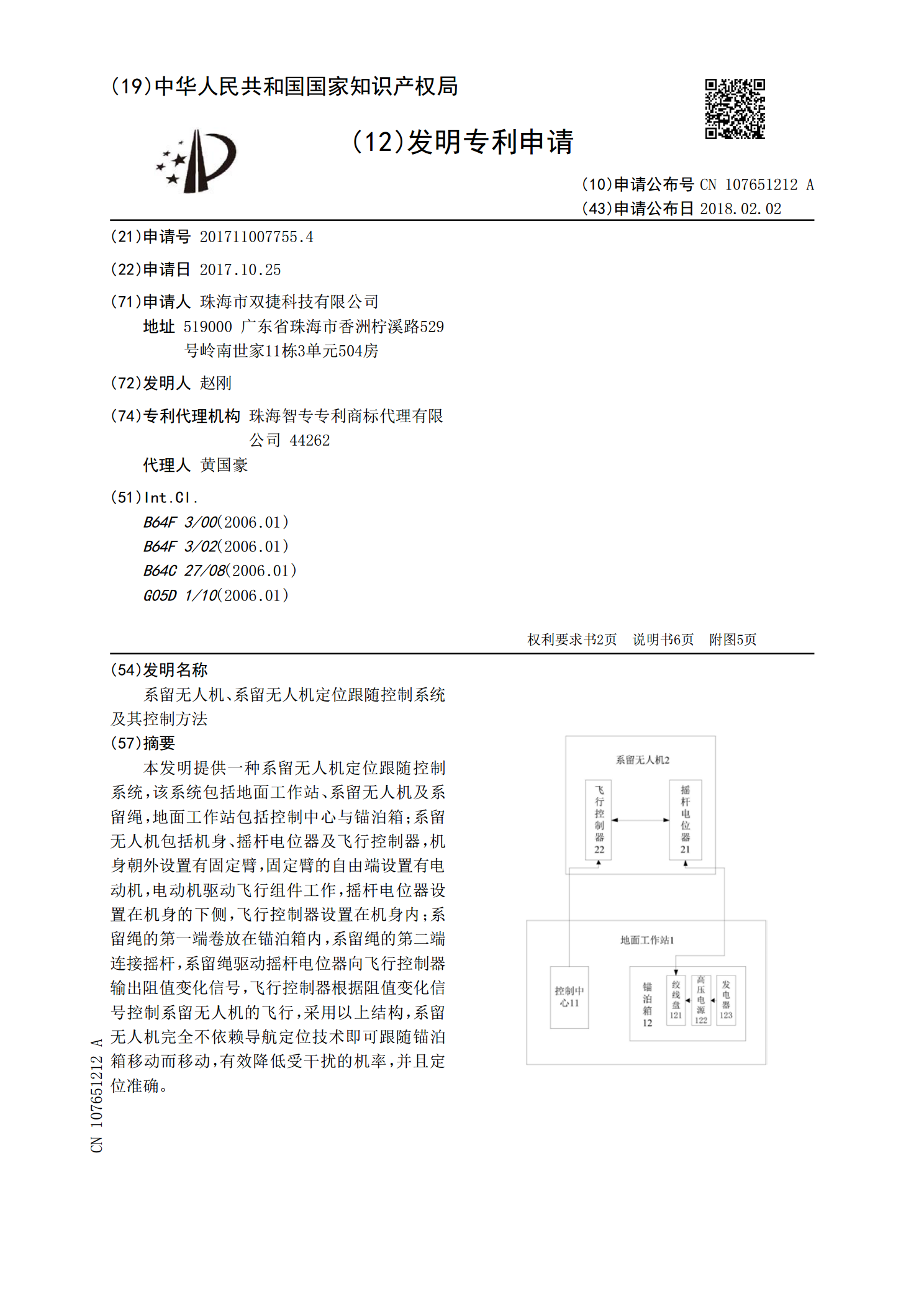
本发明提供一种系留无人机定位跟随控制系统,该系统包括地面工作站、系留无人机及系留绳,地面工作站包括控制中心与锚泊箱;系留无人机包括机身、摇杆电位器及飞行控制器,机身朝外设置有固定臂,固定臂的自由端设置有电动机,电动机驱动飞行组件工作,摇杆电位器设置在机身的下侧,飞行控制器设置在机身内;系留绳的第一端卷放在锚泊箱内,系留绳的第二端连接摇杆,系留绳驱动摇杆电位器向飞行控制器输出阻值变化信号,飞行控制器根据阻值变化信号控制系留无人机的飞行,采用以上结构,系留无人机完全不依赖导航定位技术即可跟随锚泊箱移动而移动,

系留无人机跟随车载平台方法及使用该方法的系留无人机.pdf
本发明提供一种系留无人机精确跟随车载平台方法及使用其的系留无人机。其中,方法包括:安装于地面工作站的第一GPS接收机获取所述地面工作站的三维位置数据并解算出地面工作站的三维位置坐标P

系留无人机及系留无人机系统.pdf
本发明提供一种系留无人机及系留无人机系统,系留无人机包括桨叶组件、系留输电线缆、低压供电模块和主控电路,桨叶组件包括桨叶和高压交流电机,高压交流电机驱动桨叶转动,系留输电线缆与高压交流电机连接并直接为高压交流电机供电;低压供电模块连接在系留输电线缆和主控电路之间,主控电路上设置有主控单元和通讯模块,系留无人机系统包括上述系留无人机和地面电源,系留供电线缆连接在无人机与地面电源之间,采用以上结构,高压交流电机可直接接入地面提供的高压交流电,使得高压交流电机之间与地面电源之间无需设置DC‑DC降压模块,减少无
系留无人机及系留无人机系统.pdf
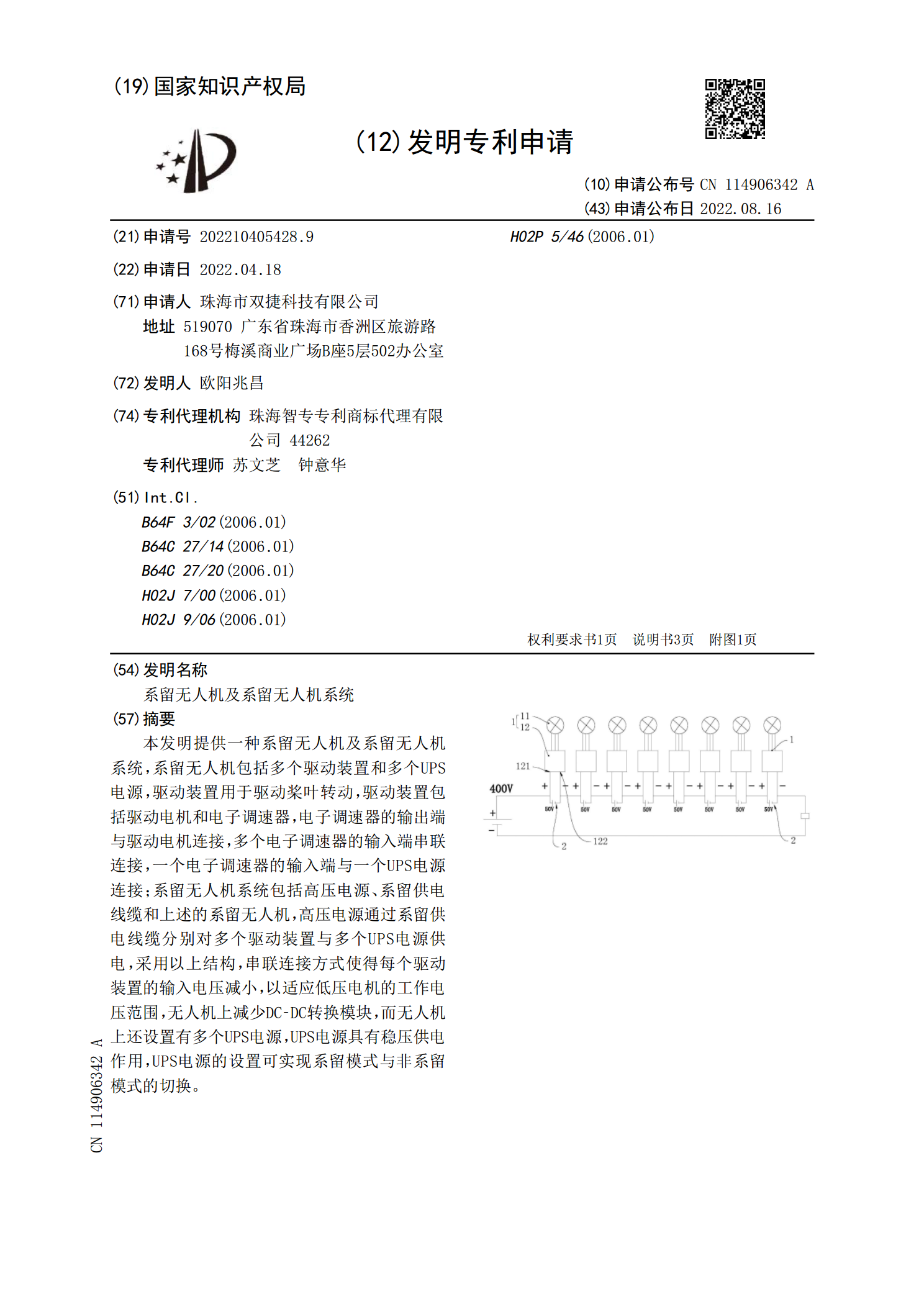
本发明提供一种系留无人机及系留无人机系统,系留无人机包括多个驱动装置和多个UPS电源,驱动装置用于驱动桨叶转动,驱动装置包括驱动电机和电子调速器,电子调速器的输出端与驱动电机连接,多个电子调速器的输入端串联连接,一个电子调速器的输入端与一个UPS电源连接;系留无人机系统包括高压电源、系留供电线缆和上述的系留无人机,高压电源通过系留供电线缆分别对多个驱动装置与多个UPS电源供电,采用以上结构,串联连接方式使得每个驱动装置的输入电压减小,以适应低压电机的工作电压范围,无人机上减少DC‑DC转换模块,而无人机上
系留电缆、系留无人机组件及系留无人机系统.pdf
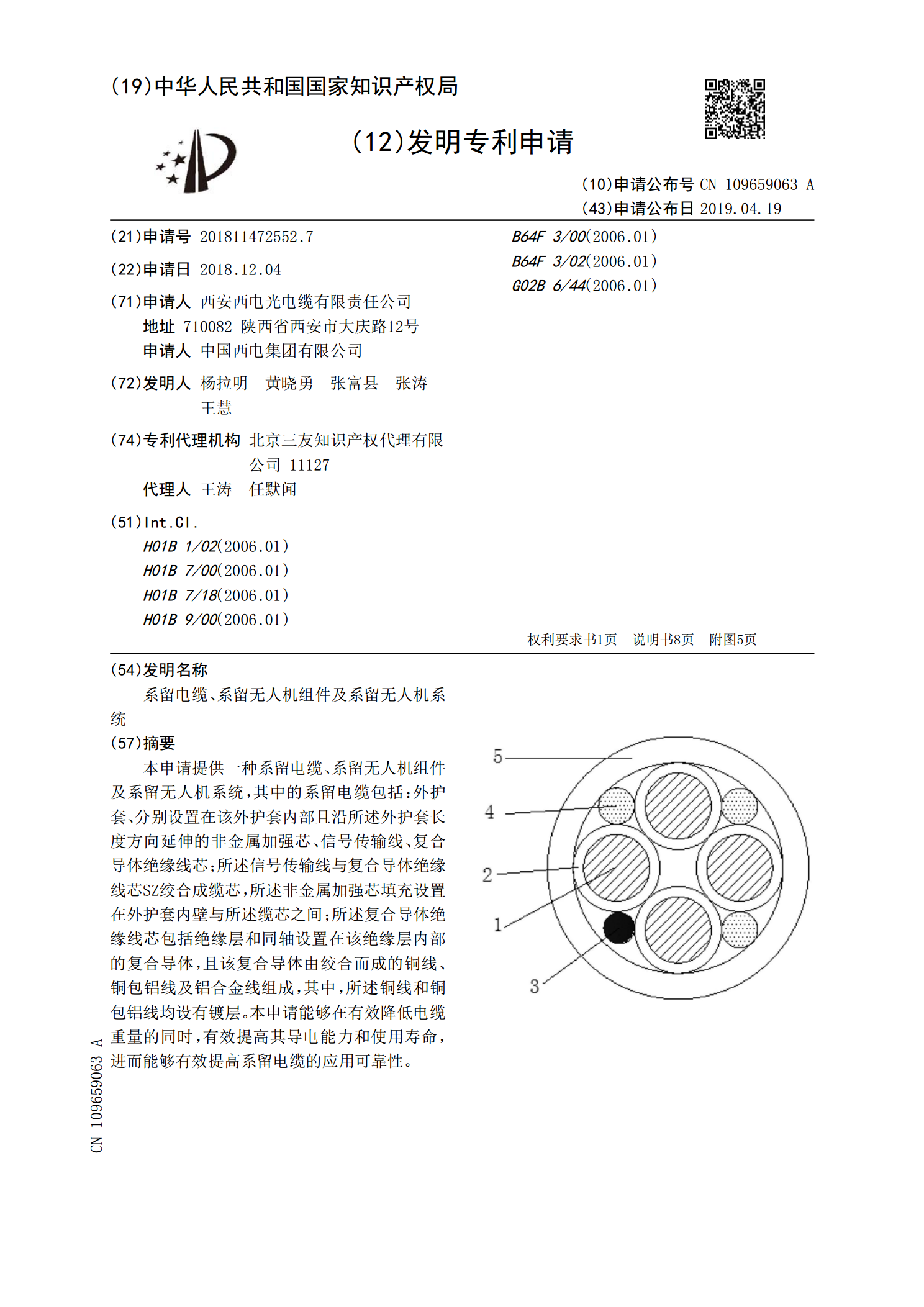
本申请提供一种系留电缆、系留无人机组件及系留无人机系统,其中的系留电缆包括:外护套、分别设置在该外护套内部且沿所述外护套长度方向延伸的非金属加强芯、信号传输线、复合导体绝缘线芯;所述信号传输线与复合导体绝缘线芯SZ绞合成缆芯,所述非金属加强芯填充设置在外护套内壁与所述缆芯之间;所述复合导体绝缘线芯包括绝缘层和同轴设置在该绝缘层内部的复合导体,且该复合导体由绞合而成的铜线、铜包铝线及铝合金线组成,其中,所述铜线和铜包铝线均设有镀层。本申请能够在有效降低电缆重量的同时,有效提高其导电能力和使用寿命,进而能够有