
一种系留无人机自动降落的调整方法、装置、设备与系统.pdf

雨巷****莺莺


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种系留无人机自动降落的调整方法、装置、设备与系统.pdf
本发明公开了一种系留无人机自动降落的调整方法、装置、设备与系统,其中方法包括获取无人机本体在降落时的实时高度数据;当所述实时高度数据大于预设阈值时,获取实时GPS定位数据;基于所述实时GPS定位数据对应调整无人机本体的实时位置;当所述实时高度数据小于或等于所述预设阈值时,获取连接线缆与无人机地面控制系统之间的实时角度变化数据;基于所述实时角度变化数据,对应调整无人机本体的实时位置。本发明实施例提供的系留无人机自动降落的调整方法、装置、设备与系统,通过结合GPS定位与相关角度变化,提高了系留无人机的自动降落

一种系留无人机车载降落控制方法.pdf
本发明公开了一种系留无人机车载降落控制方法,包括:系留无人机接到降落指令后,先垂直爬升或下降到返航点,再水平返航到悬停点;在悬停点改变航向,使系留无人机机头方向与车载平台方向对正,接着下降到等待降落点并调整位置使系留无人机与平台对正,当对正误差连续几秒都在对正精度范围内时,控制系留无人机快速下降且在快速下降的过程中,不停计算对正误差,若误差大于降落误差时,系留无人机上升至等待降落点,重复对正至降落过程;当系留无人机快速下降到小于停桨高度时,系留无人机停桨,自由落体至车载平台;本发明使得大尺寸多旋翼飞机能够

一种系留无人机系统的燃料输送方法及系留无人机系统.pdf
本发明实施例提供了一种系留无人机系统的燃料输送方法及系留无人机系统,其中,方法包括:地面燃料设备,用于储存燃料;阀门,作为供给或断供所述燃料的开关;机载燃料的传感器,用于感应无人机耗料量,控制所述阀门处于打开的状态或关闭的状态;系留缆,用于在所述阀门处于打开的状态下,为所述系留无人机系统中的无人机的发动机供给所述燃料;发动机,用于通过所述燃料,驱动所述无人机的无人机驱动系统。这样使用燃料为系留无人机系统提供能量,并不需要高压供电为系留无人机系统提供能量,相较于现有技术,避免了高压电,不会漏电触电,也不会传
一种系留无人机用全自动缆绳收放装置.pdf
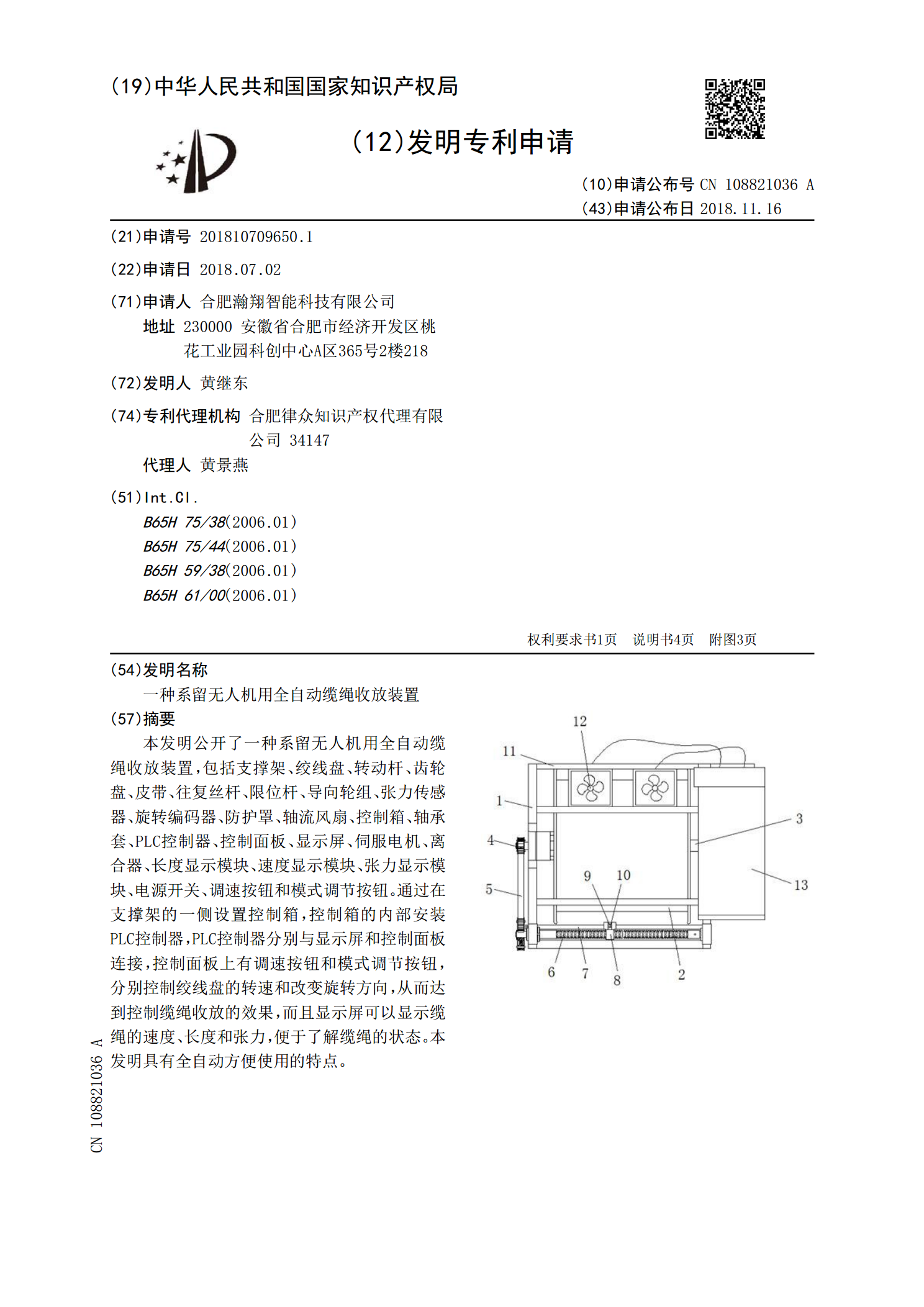
本发明公开了一种系留无人机用全自动缆绳收放装置,包括支撑架、绞线盘、转动杆、齿轮盘、皮带、往复丝杆、限位杆、导向轮组、张力传感器、旋转编码器、防护罩、轴流风扇、控制箱、轴承套、PLC控制器、控制面板、显示屏、伺服电机、离合器、长度显示模块、速度显示模块、张力显示模块、电源开关、调速按钮和模式调节按钮。通过在支撑架的一侧设置控制箱,控制箱的内部安装PLC控制器,PLC控制器分别与显示屏和控制面板连接,控制面板上有调速按钮和模式调节按钮,分别控制绞线盘的转速和改变旋转方向,从而达到控制缆绳收放的效果,而且显示

一种系留无人机装置.pdf
本发明涉及一种系留无人机装置,包括:无人机:包括机架、转动连接在机架内的多个动力模块、用于驱动动力模块转动的电机以及设置在机架侧边的可转动的导向板;绞车:与所述机架底部通过缆线连接,并在绞车内设有用于驱动电机旋转的电源及控制开关。与现有技术相比,本发明结构简单、操作方便、安装拆卸方便。