
一种皮带式自动智能机械手臂光盘抓取装置.pdf

努力****妙风


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种皮带式自动智能机械手臂光盘抓取装置.pdf
本发明公开了一种皮带式自动智能机械手臂光盘抓取装置,其特征在于,该装置包括控制单元及抓取单元,通过机械臂抓取单元实现了全自动单片顺序抓取光盘,节省人工时间成本,加快工作进度,机械臂抓取单元通过限位铁片、抓持端子控制抓取光盘数量,实现每次执行抓取单张光盘,快速、精准,避免了人工抓盘、放盘制造误差,省时省力,并自动放置目标刻录机中,避免了人工抓放盘时在光盘上遗留的指纹、油渍、灰尘,增加光盘刻录成功率,使刻录机、打印机内部整洁,控制单元采用步进电机、电磁阀为低能耗部件,仅工作时通电,无污染、不浪费电,智能精准抓

一种用于光盘库的自动抓取分离光盘装置.pdf
本发明公开了一种用于光盘库的自动抓取分离光盘装置,包括抓手座、抓手中心轴、压杆组件、分盘针组件、伺服电机、微型光电传感器组件、抓手模组安装板、分盘电机齿轮、大齿轮组件,大齿轮通过抓手中心轴安装在抓手座上,分盘电机齿轮与大齿轮啮合,电机转动带动大齿轮,以此带动分盘针齿轮转动,在光电传感器的反馈信息基础上,通过分盘针的往复旋转和抓手座下光盘压杆的配合,实现光盘的抓取和分离。本发明解决了光盘库机电装置抓取、移动、分离光盘行程长、耗时长的问题,可以一次性将多张光盘在光盘匣与光驱之间移动,是一种体积小、速度快、稳定

一种机器人连杆式手臂抓取装置.pdf
本发明公开了一种机器人连杆式手臂抓取装置,包括安装板,安装板上设置有齿轮啮合传动机构,齿轮啮合传动机构包括主动齿轮和从动齿轮,主动齿轮的中心设有主动轴,主动轴一端延伸至主动齿轮的外侧并通过皮带连接有电机,电机设在电机支座上,电机支座的底端设有第一连接杆,第一连接杆的底端设有固定板,固定板的上表面设有连杆机构,固定板的下方设置有固定抓手;从动齿轮远离主动齿轮的一端连接有操纵杆,操纵杆远离从动齿轮的一端连接有第二连接杆,第二连接杆的下方设有活动板,活动板的上表面也设有连杆机构,活动板的下方设有活动抓手,抓取力
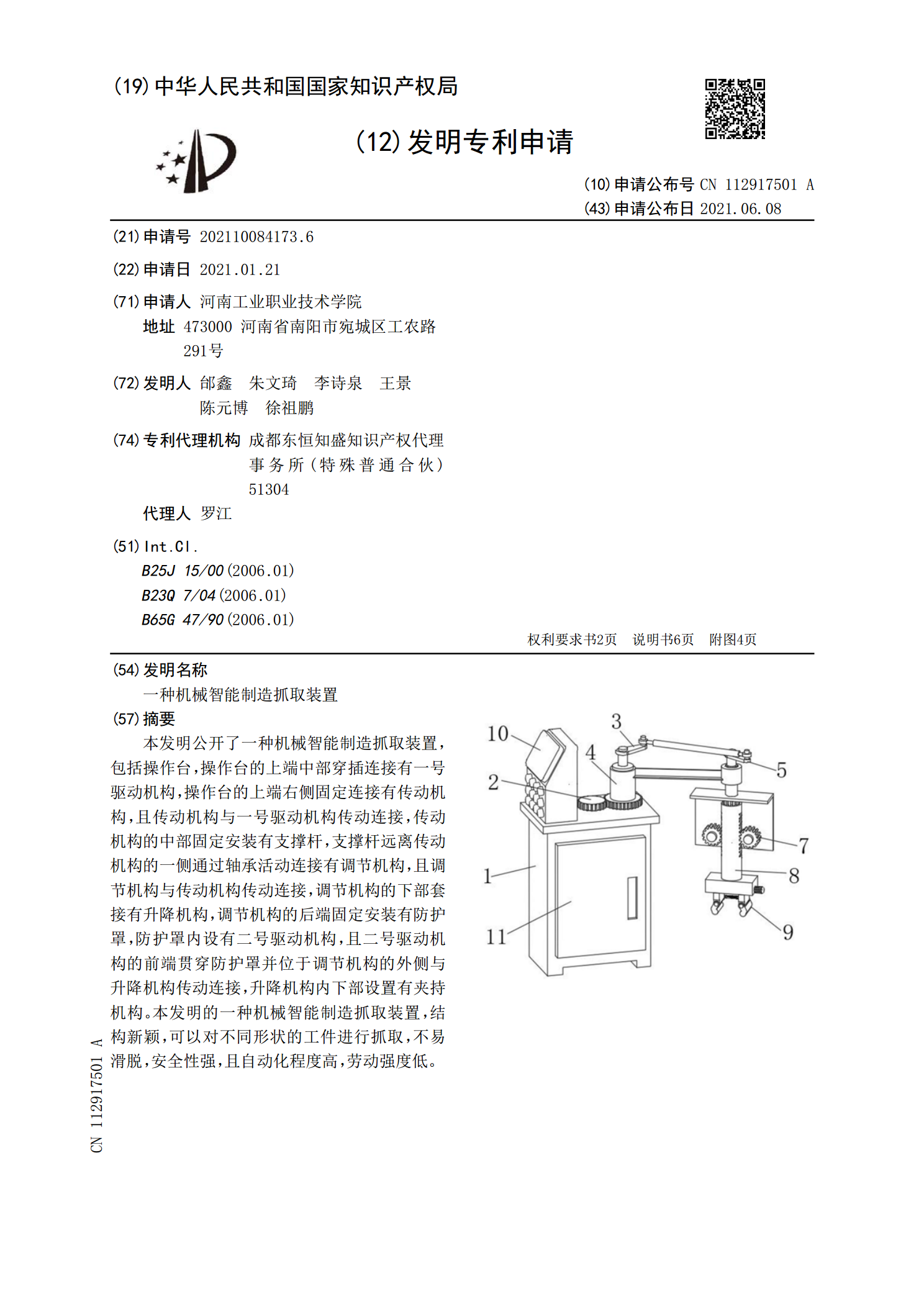
一种机械智能制造抓取装置.pdf
本发明公开了一种机械智能制造抓取装置,包括操作台,操作台的上端中部穿插连接有一号驱动机构,操作台的上端右侧固定连接有传动机构,且传动机构与一号驱动机构传动连接,传动机构的中部固定安装有支撑杆,支撑杆远离传动机构的一侧通过轴承活动连接有调节机构,且调节机构与传动机构传动连接,调节机构的下部套接有升降机构,调节机构的后端固定安装有防护罩,防护罩内设有二号驱动机构,且二号驱动机构的前端贯穿防护罩并位于调节机构的外侧与升降机构传动连接,升降机构内下部设置有夹持机构。本发明的一种机械智能制造抓取装置,结构新颖,可以
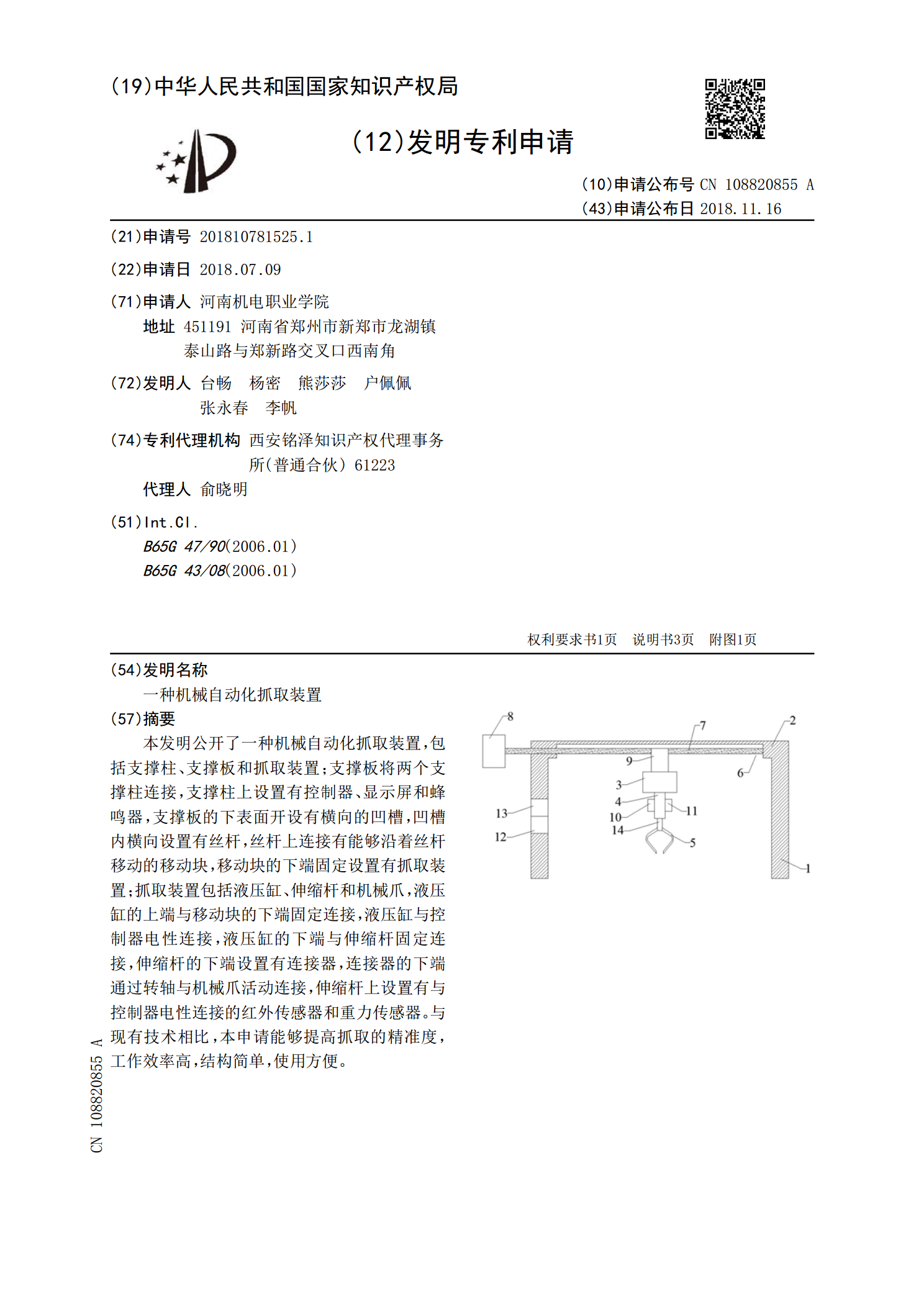
一种机械自动化抓取装置.pdf
本发明公开了一种机械自动化抓取装置,包括支撑柱、支撑板和抓取装置;支撑板将两个支撑柱连接,支撑柱上设置有控制器、显示屏和蜂鸣器,支撑板的下表面开设有横向的凹槽,凹槽内横向设置有丝杆,丝杆上连接有能够沿着丝杆移动的移动块,移动块的下端固定设置有抓取装置;抓取装置包括液压缸、伸缩杆和机械爪,液压缸的上端与移动块的下端固定连接,液压缸与控制器电性连接,液压缸的下端与伸缩杆固定连接,伸缩杆的下端设置有连接器,连接器的下端通过转轴与机械爪活动连接,伸缩杆上设置有与控制器电性连接的红外传感器和重力传感器。与现有技术相