
一种机器人连杆式手臂抓取装置.pdf

森林****来了

1/7

2/7
3/7

4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机器人连杆式手臂抓取装置.pdf
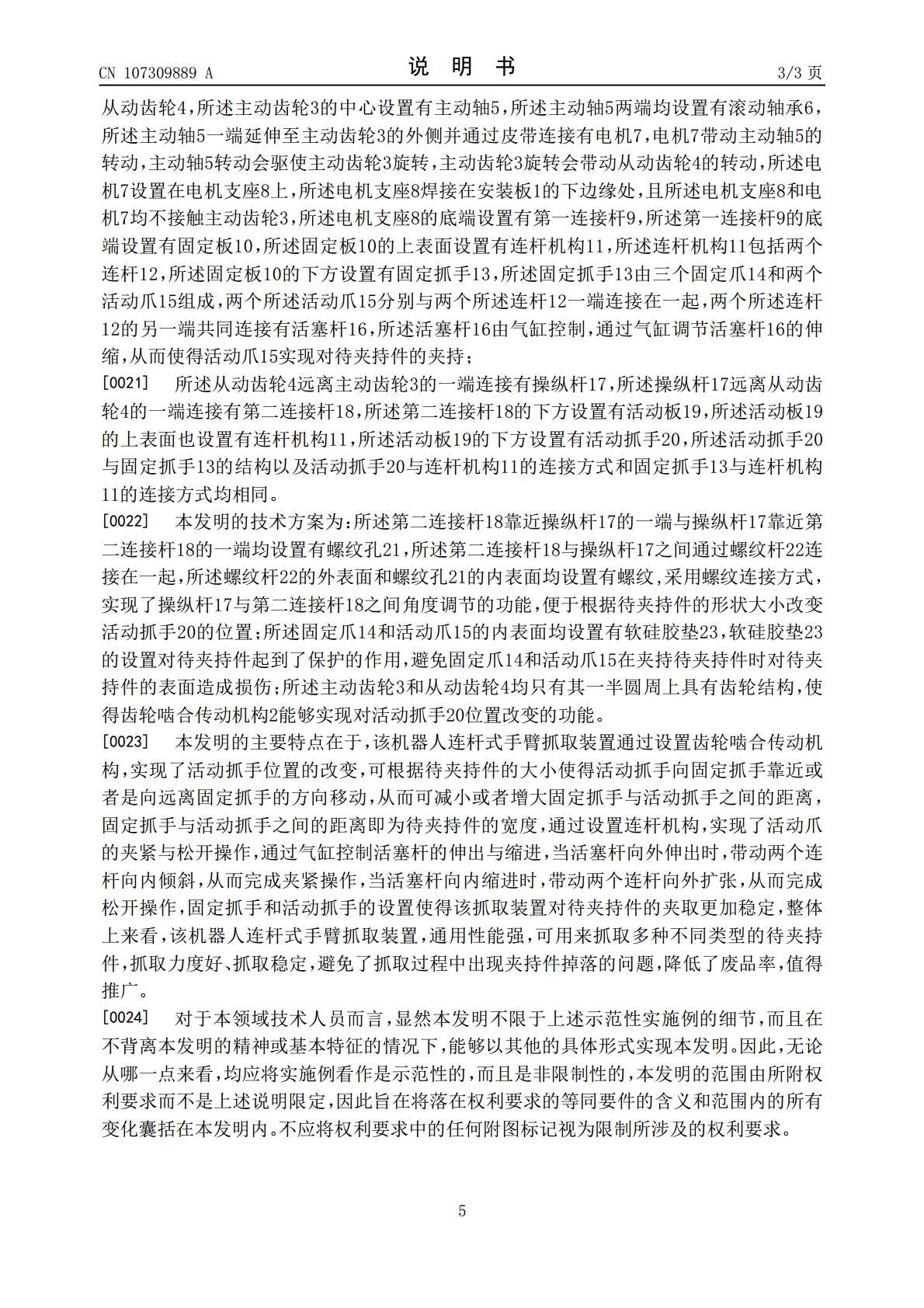
本发明公开了一种机器人连杆式手臂抓取装置,包括安装板,安装板上设置有齿轮啮合传动机构,齿轮啮合传动机构包括主动齿轮和从动齿轮,主动齿轮的中心设有主动轴,主动轴一端延伸至主动齿轮的外侧并通过皮带连接有电机,电机设在电机支座上,电机支座的底端设有第一连接杆,第一连接杆的底端设有固定板,固定板的上表面设有连杆机构,固定板的下方设置有固定抓手;从动齿轮远离主动齿轮的一端连接有操纵杆,操纵杆远离从动齿轮的一端连接有第二连接杆,第二连接杆的下方设有活动板,活动板的上表面也设有连杆机构,活动板的下方设有活动抓手,抓取力
一种机器人手臂抓取控制方法及系统.pdf
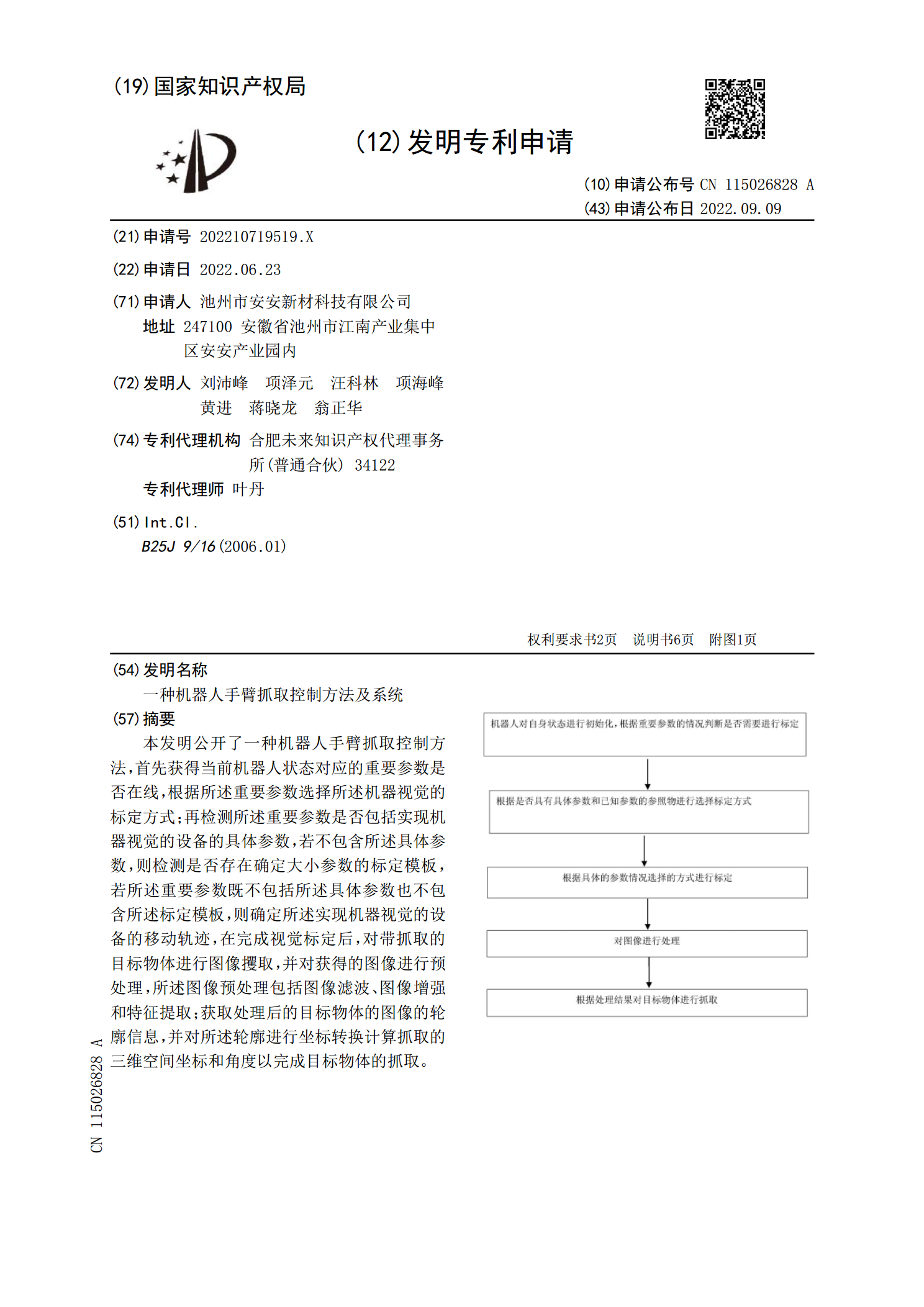
本发明公开了一种机器人手臂抓取控制方法,首先获得当前机器人状态对应的重要参数是否在线,根据所述重要参数选择所述机器视觉的标定方式;再检测所述重要参数是否包括实现机器视觉的设备的具体参数,若不包含所述具体参数,则检测是否存在确定大小参数的标定模板,若所述重要参数既不包括所述具体参数也不包含所述标定模板,则确定所述实现机器视觉的设备的移动轨迹,在完成视觉标定后,对带抓取的目标物体进行图像攫取,并对获得的图像进行预处理,所述图像预处理包括图像滤波、图像增强和特征提取;获取处理后的目标物体的图像的轮廓信息,并对所

一种机器人抓取装置.pdf
本发明公开了一种机器人抓取装置,包括机体,所述机体的两侧均固定连接有支撑架,所述机体内设有机腔,所述机体内设有竖直设有第一支架,所述机体内水平设有第二支架,所述第二支架上设有第一滑槽,所述第一支架内设有第一电机,所述第一电机的驱动轴固定连接有第一皮带轮,所述第一电机的下方设有第二滑槽,所述第二滑槽上滑动连接有滑块,所述滑块上转动连接有第二皮带轮,所述第一电机与滑块之间设有第一连接弹簧,所述滑块远离第一连接弹簧的一端连接有第二连接弹簧。本发明结构稳定,抗震性能良好,便于移动,便于调节抓取装置的方位,且抓取装
一种低速移动抓取搬运机器人手臂的承载爪.pdf
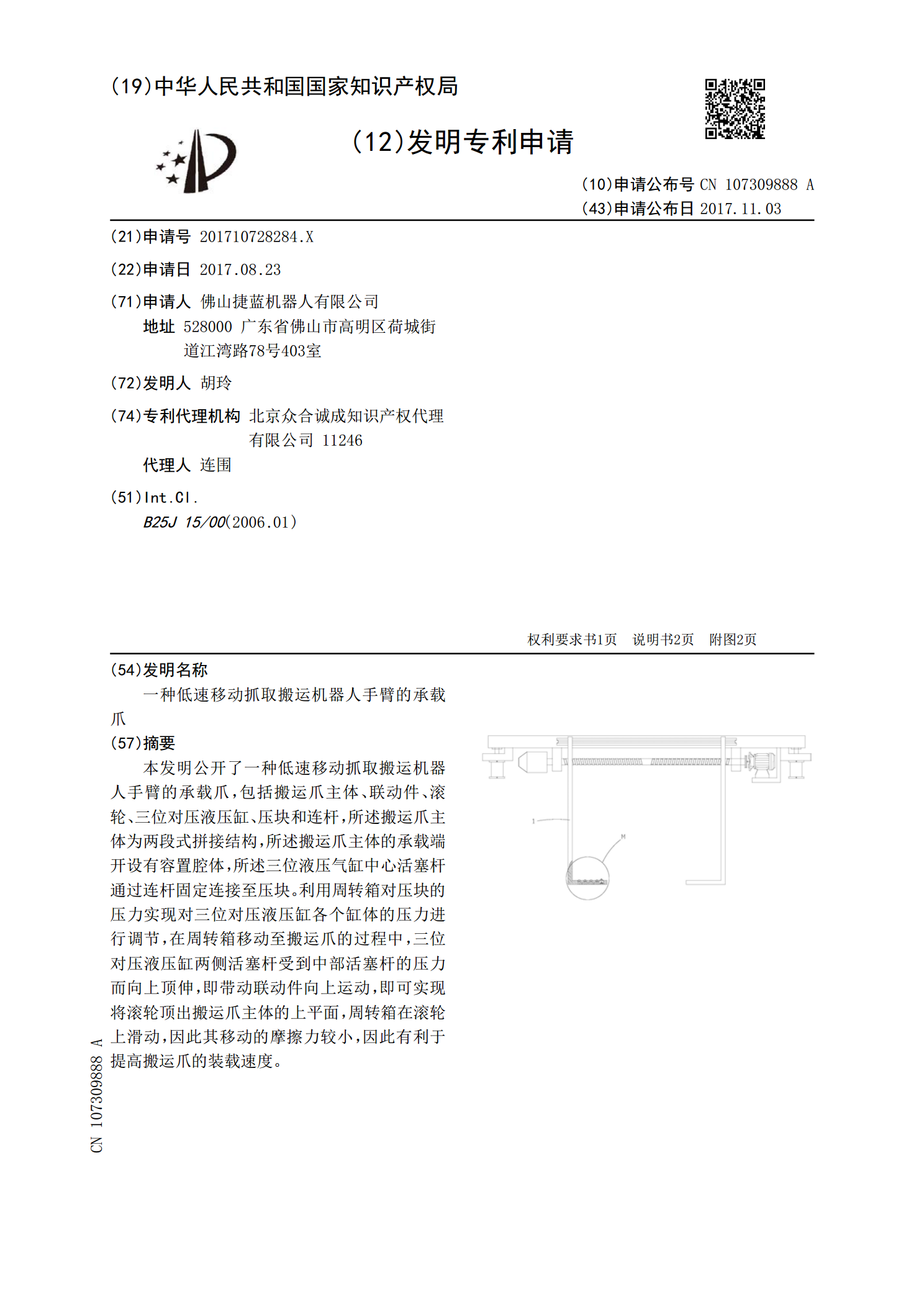
本发明公开了一种低速移动抓取搬运机器人手臂的承载爪,包括搬运爪主体、联动件、滚轮、三位对压液压缸、压块和连杆,所述搬运爪主体为两段式拼接结构,所述搬运爪主体的承载端开设有容置腔体,所述三位液压气缸中心活塞杆通过连杆固定连接至压块。利用周转箱对压块的压力实现对三位对压液压缸各个缸体的压力进行调节,在周转箱移动至搬运爪的过程中,三位对压液压缸两侧活塞杆受到中部活塞杆的压力而向上顶伸,即带动联动件向上运动,即可实现将滚轮顶出搬运爪主体的上平面,周转箱在滚轮上滑动,因此其移动的摩擦力较小,因此有利于提高搬运爪的装

一种喷漆机器人手臂装置.pdf
本发明公开了一种喷漆机器人手臂装置,包括底座、机壳和气缸,所述底座下部通过轴承连接有万向轮,所述底座上部通过焊接固定有配重块,所述底座上部通过焊接固定有机壳,所述机壳内部安装有气泵,所述气泵左部安装有进气口,所述远离配重块的一侧安装有处理器,所述处理器左侧安装有操作面板,所述机壳上部安装有气缸,所述气缸内部安装有可伸缩弹簧,所述气缸上部安装有旋转器,所述旋转器右侧安装有驱动电机,所述驱动电机右侧安装有横管,所述横管上部安装有进漆管,所述进漆管右侧安装有调节旋钮,该装置不会体积的大小而限制操作,使用范围广、