
三维点云半自动标注方法、系统、电子设备及存储介质.pdf

一条****杉淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

三维点云半自动标注方法、系统、电子设备及存储介质.pdf
本发明提供一种三维点云半自动标注方法、系统、电子设备及存储介质,方法包括:基于实景三维模型转换得到的点云数据,对所述点云数据进行标注,生成训练点云数据集;构建局部特征聚合与随机采样进行互补的语义网络模型;基于所述训练点云数据集对构建的所述语义网络模型进行训练,得到训练后的语义网络模型;基于训练后的语义网络模型对大量点云数据进行识别,获取大量点云数据的识别结果;大量点云数据的识别结果进行调整。本发明结合语义分割识别结果来辅助点云数据标注,节省了大量的人力,其语义网络模型能适应室外大场景数据,尽可能保留整体的

点云标注方法、装置、存储介质及电子设备.pdf
本发明公开了一种点云标注方法、装置、存储介质及电子设备,该方法包括:检测待标注物的起点位置与终点位置;基于所述起点位置与所述终点位置,生成包含有待标注物的点云的第一标注框;对所述第一标注框的表面进行渲染;对渲染后的所述第一标注框进行大小调整,得到第二标注框。本发明实施例可以对标注框的表面进行着色渲染,使得渲染后的标注框中的点云在视觉效果中也是有颜色的,从而避免通过遍历点云的方式来渲染,在算力限制或计算机硬件能力不足的情况下,也能够在标注操作完成时立即同步完成渲染的变化,进而提高标注人员的标注速度。

三维点云地图构建方法、系统、电子设备及存储介质.pdf
本发明提供一种三维点云地图构建方法、系统、电子设备及存储介质,该方法包括:基于n帧点云构建初始点云地图和初始位姿图;新建体素;在体素中加入第i帧点云后,确定体素中目标体素单元的个数,其中目标体素单元为包含有加入的各帧点云中的点的体素单元,而后根据目标体素单元的个数确定第i帧点云是否为关键帧点云,若是,则将所有目标体素单元中点云的点清零,令i=i+1,反之,则直接令i=i+1,并重新在体素中加入第i帧点云,直至i=n;基于n帧点云中的关键帧点云和非关键帧点云以及初始位姿图,获取每帧点云的目标位姿;基于n帧点
三维图像的关键点标注方法、装置、电子设备及存储介质.pdf
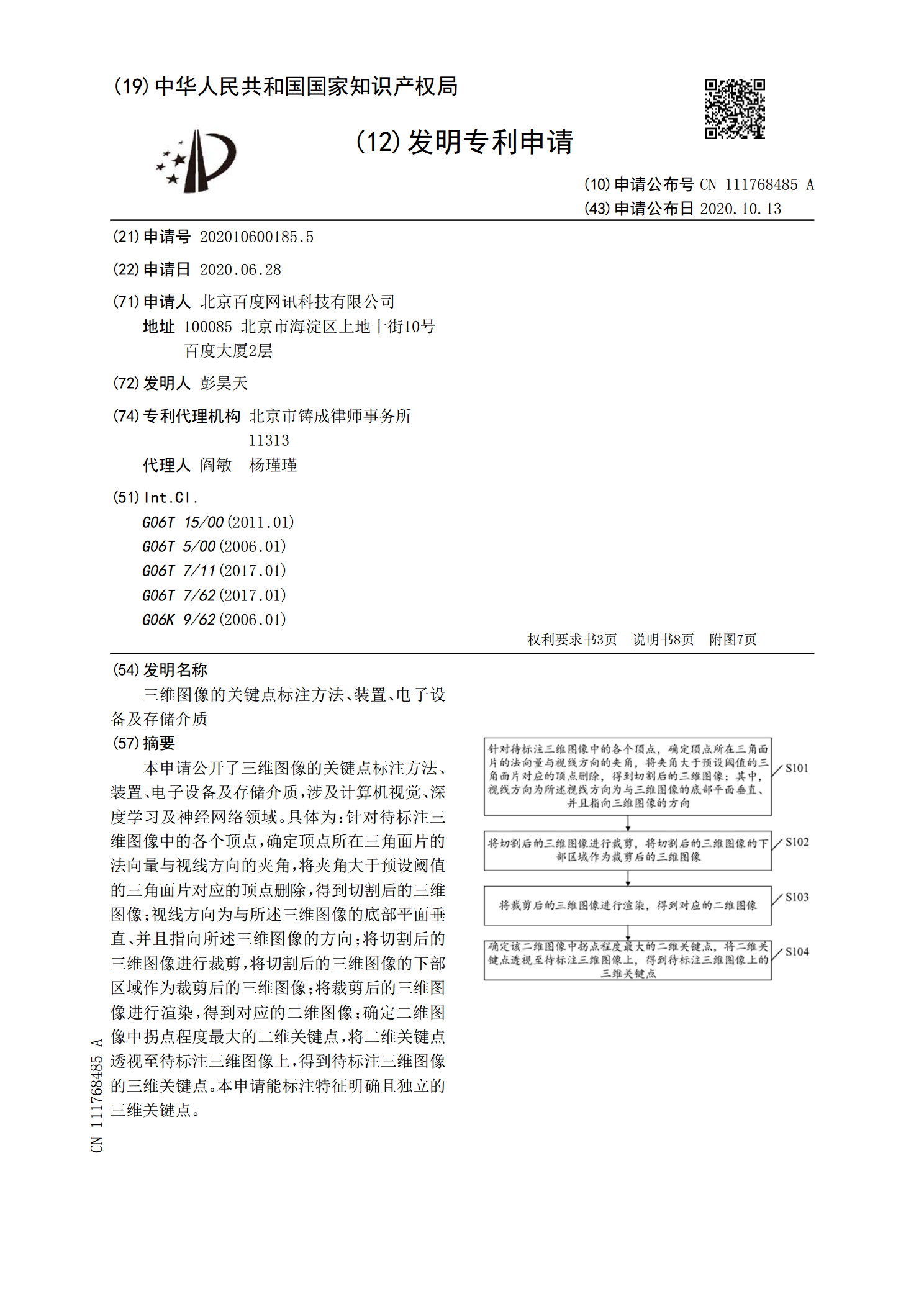
本申请公开了三维图像的关键点标注方法、装置、电子设备及存储介质,涉及计算机视觉、深度学习及神经网络领域。具体为:针对待标注三维图像中的各个顶点,确定顶点所在三角面片的法向量与视线方向的夹角,将夹角大于预设阈值的三角面片对应的顶点删除,得到切割后的三维图像;视线方向为与所述三维图像的底部平面垂直、并且指向所述三维图像的方向;将切割后的三维图像进行裁剪,将切割后的三维图像的下部区域作为裁剪后的三维图像;将裁剪后的三维图像进行渲染,得到对应的二维图像;确定二维图像中拐点程度最大的二维关键点,将二维关键点透视至待
关键点标注方法、装置、电子设备及存储介质.pdf
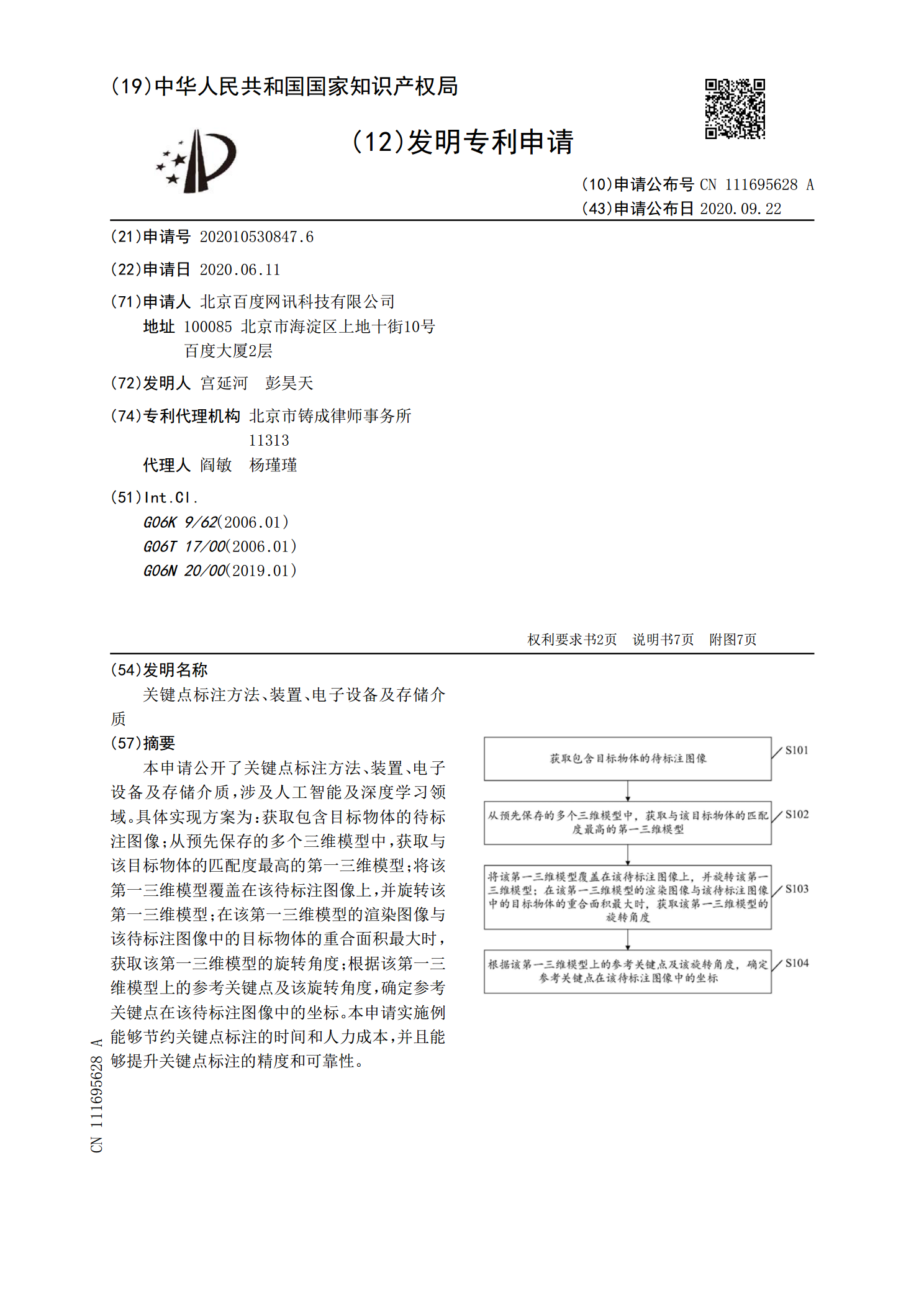
本申请公开了关键点标注方法、装置、电子设备及存储介质,涉及人工智能及深度学习领域。具体实现方案为:获取包含目标物体的待标注图像;从预先保存的多个三维模型中,获取与该目标物体的匹配度最高的第一三维模型;将该第一三维模型覆盖在该待标注图像上,并旋转该第一三维模型;在该第一三维模型的渲染图像与该待标注图像中的目标物体的重合面积最大时,获取该第一三维模型的旋转角度;根据该第一三维模型上的参考关键点及该旋转角度,确定参考关键点在该待标注图像中的坐标。本申请实施例能够节约关键点标注的时间和人力成本,并且能够提升关键点