
三维图像的关键点标注方法、装置、电子设备及存储介质.pdf

文宣****66

1/10

2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
三维图像的关键点标注方法、装置、电子设备及存储介质.pdf
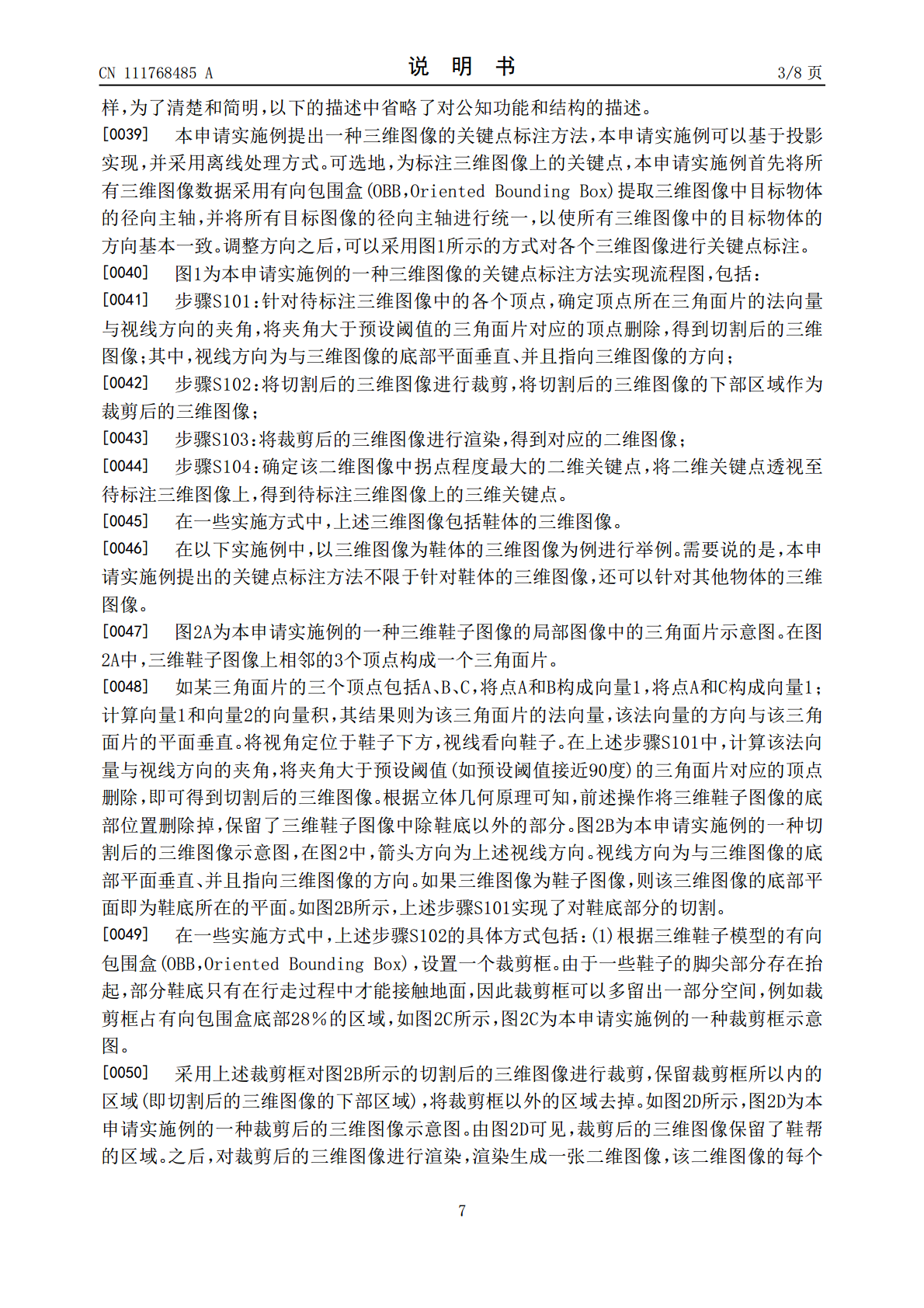
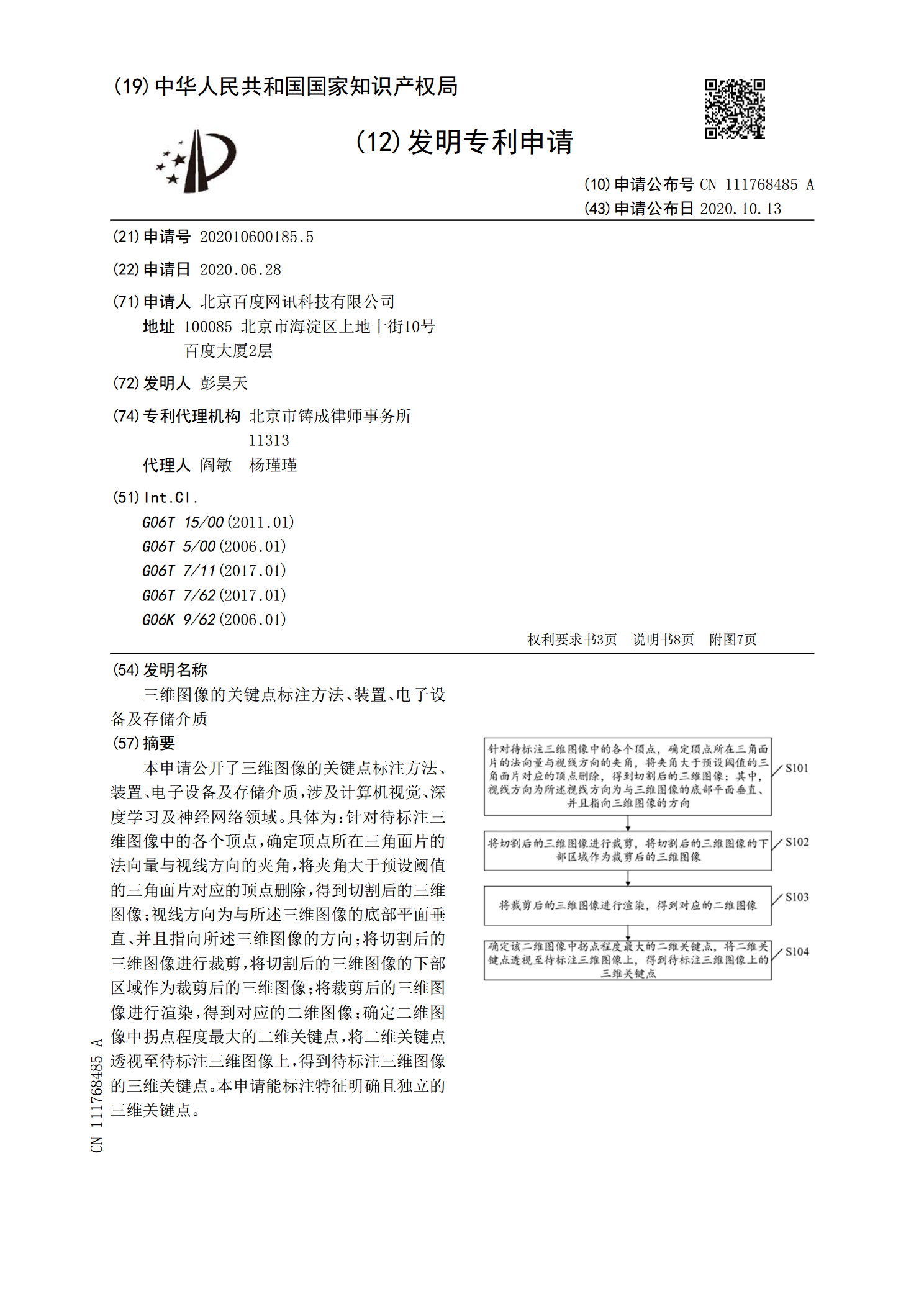
本申请公开了三维图像的关键点标注方法、装置、电子设备及存储介质,涉及计算机视觉、深度学习及神经网络领域。具体为:针对待标注三维图像中的各个顶点,确定顶点所在三角面片的法向量与视线方向的夹角,将夹角大于预设阈值的三角面片对应的顶点删除,得到切割后的三维图像;视线方向为与所述三维图像的底部平面垂直、并且指向所述三维图像的方向;将切割后的三维图像进行裁剪,将切割后的三维图像的下部区域作为裁剪后的三维图像;将裁剪后的三维图像进行渲染,得到对应的二维图像;确定二维图像中拐点程度最大的二维关键点,将二维关键点透视至待
关键点标注方法、装置、电子设备及存储介质.pdf
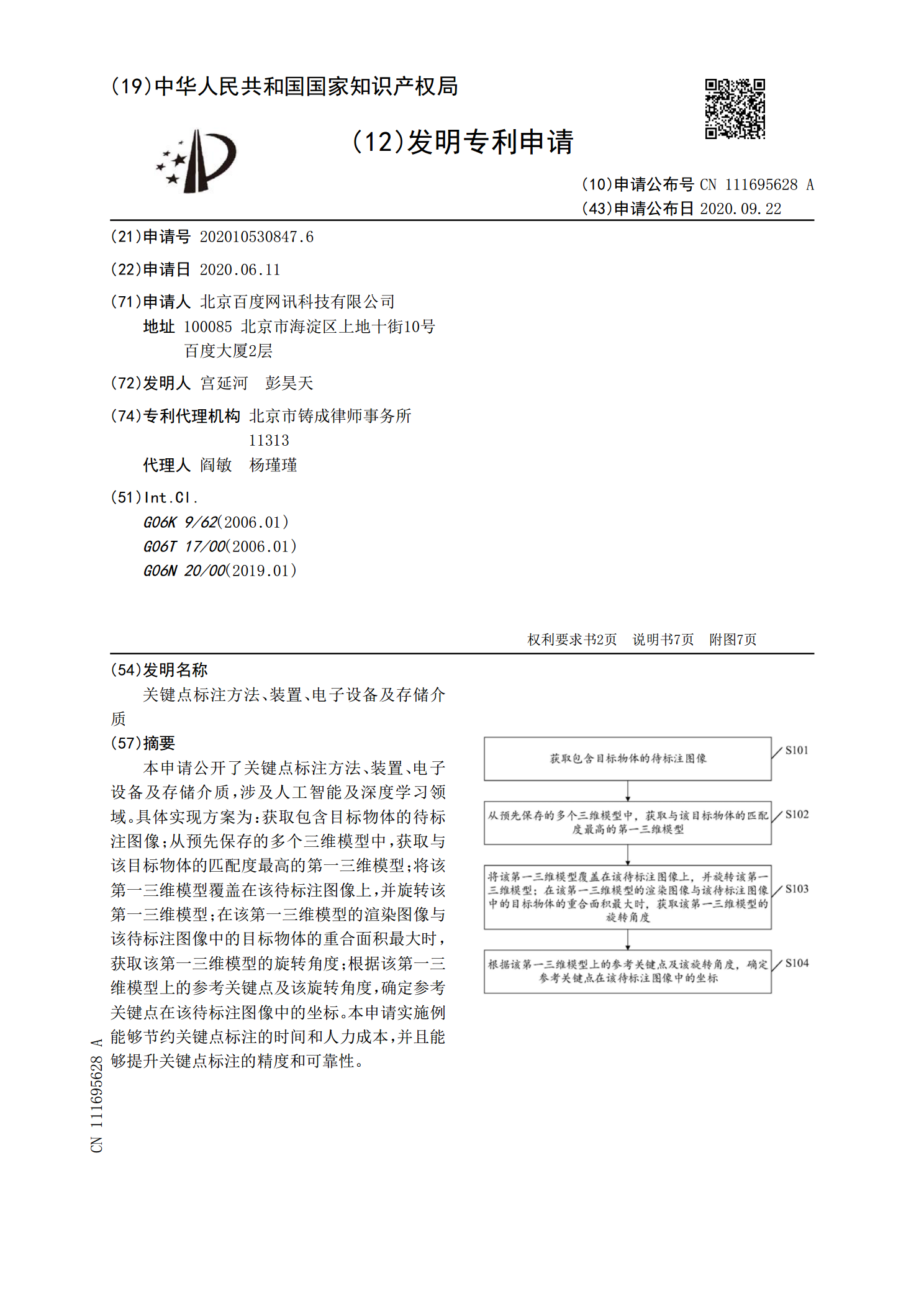
本申请公开了关键点标注方法、装置、电子设备及存储介质,涉及人工智能及深度学习领域。具体实现方案为:获取包含目标物体的待标注图像;从预先保存的多个三维模型中,获取与该目标物体的匹配度最高的第一三维模型;将该第一三维模型覆盖在该待标注图像上,并旋转该第一三维模型;在该第一三维模型的渲染图像与该待标注图像中的目标物体的重合面积最大时,获取该第一三维模型的旋转角度;根据该第一三维模型上的参考关键点及该旋转角度,确定参考关键点在该待标注图像中的坐标。本申请实施例能够节约关键点标注的时间和人力成本,并且能够提升关键点
面部关键点的标注方法、装置、电子设备及存储介质.pdf
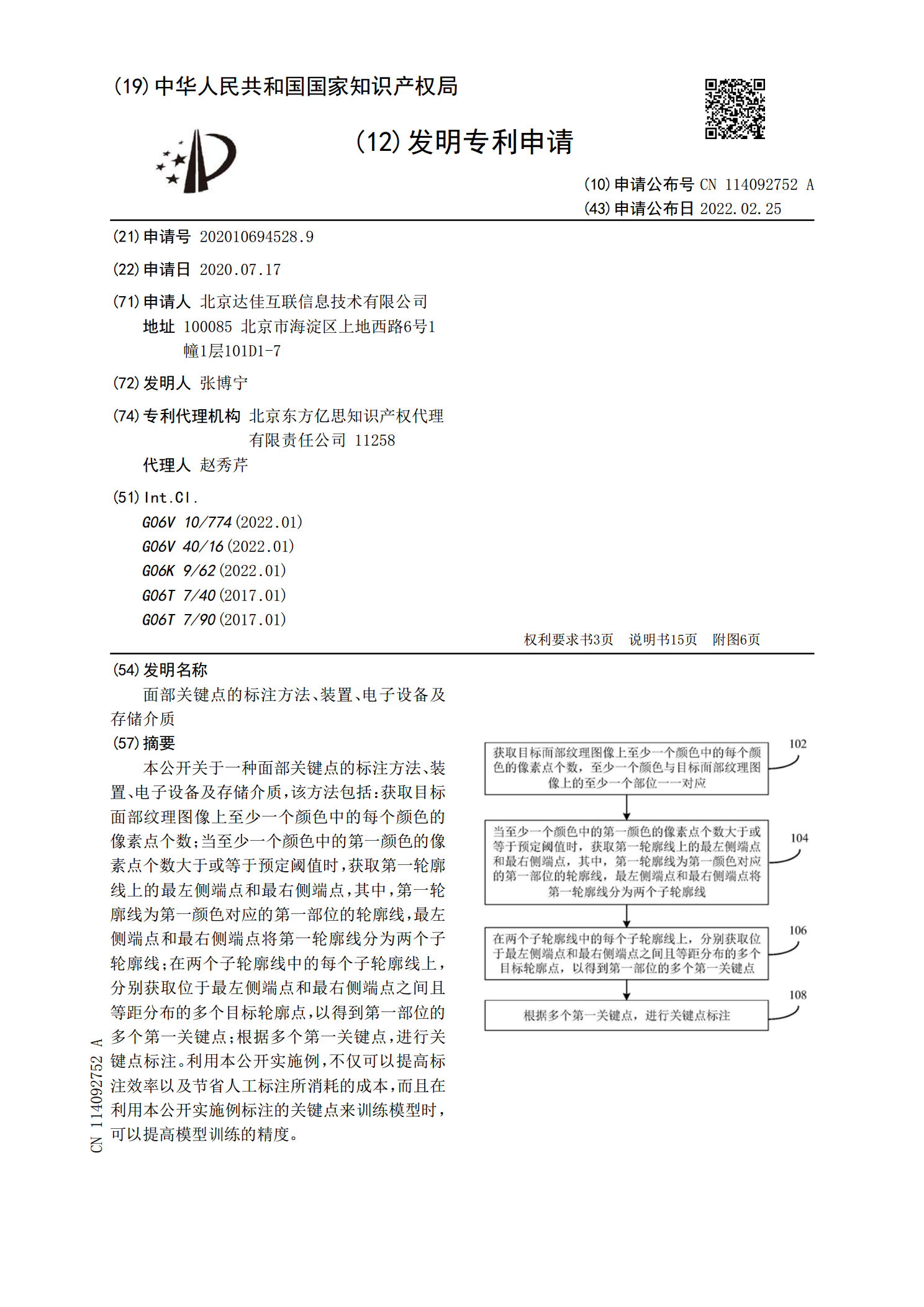
本公开关于一种面部关键点的标注方法、装置、电子设备及存储介质,该方法包括:获取目标面部纹理图像上至少一个颜色中的每个颜色的像素点个数;当至少一个颜色中的第一颜色的像素点个数大于或等于预定阈值时,获取第一轮廓线上的最左侧端点和最右侧端点,其中,第一轮廓线为第一颜色对应的第一部位的轮廓线,最左侧端点和最右侧端点将第一轮廓线分为两个子轮廓线;在两个子轮廓线中的每个子轮廓线上,分别获取位于最左侧端点和最右侧端点之间且等距分布的多个目标轮廓点,以得到第一部位的多个第一关键点;根据多个第一关键点,进行关键点标注。利用

图像标注方法、装置、存储介质及电子设备.pdf
本公开涉及一种图像标注方法、装置、存储介质及电子设备,包括:创建三维仿真场景;根据预先设置的仿真摄像头确定目标图像中所包括的目标分割对象;根据目标图像中的目标分割对象的个数对目标图像进行渲染;通过渲染结果获取目标图像中每个像素点的标注信息,以对目标图像进行标注。能够通过对三维仿真场景中的仿真摄像头所拍摄得到的图像进行渲染的方式来实现自动化标注的功能,还能根据该图像中的目标分割对象的个数来对该目标图像进行渲染,从而避免由于该目标图像中的目标分割对象的个数过多而导致的标注信息不全或者标注信息不准确的问题,提高
图像标注方法、装置、电子设备及存储介质.pdf
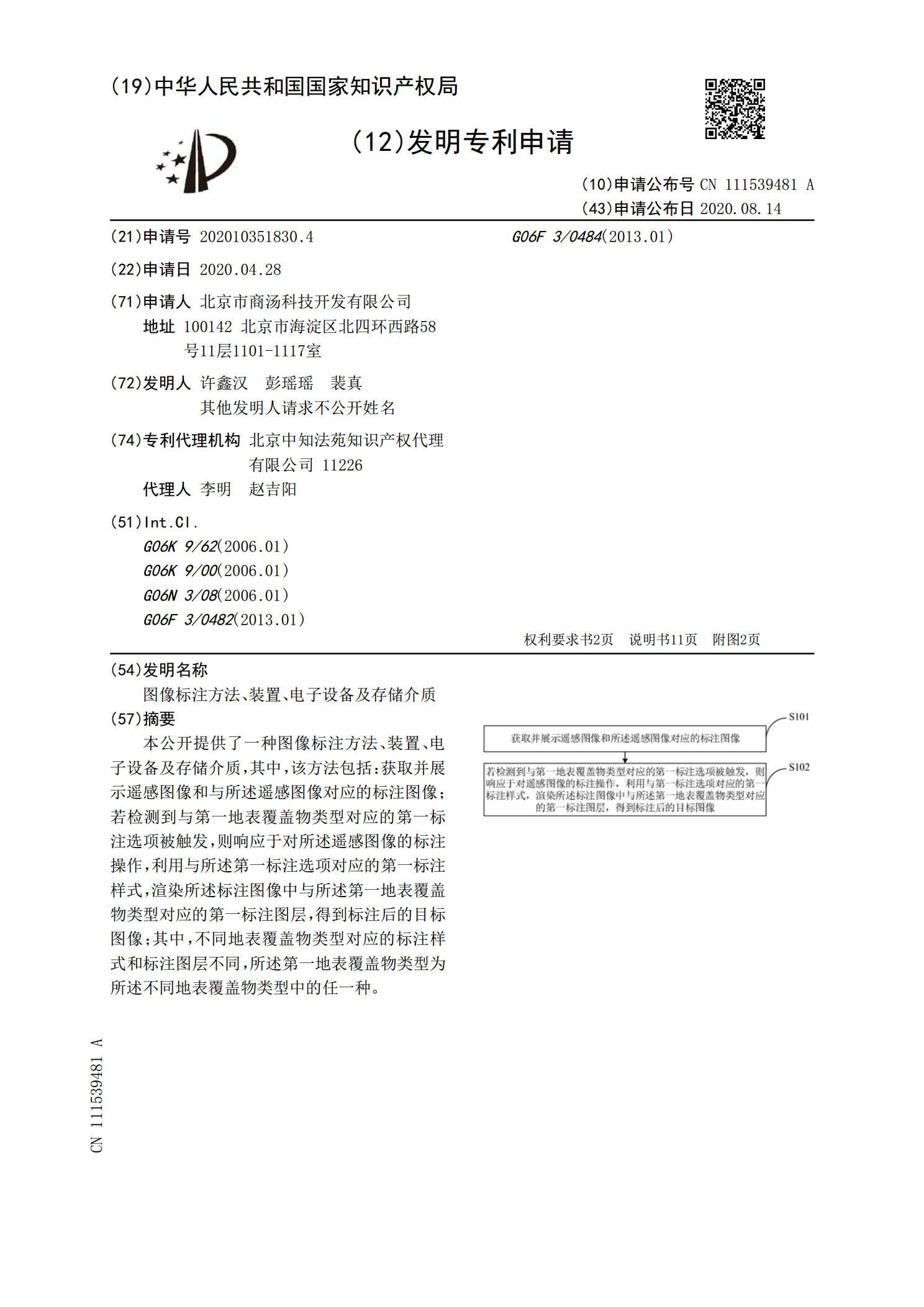
本公开提供了一种图像标注方法、装置、电子设备及存储介质,其中,该方法包括:获取并展示遥感图像和与所述遥感图像对应的标注图像;若检测到与第一地表覆盖物类型对应的第一标注选项被触发,则响应于对所述遥感图像的标注操作,利用与所述第一标注选项对应的第一标注样式,渲染所述标注图像中与所述第一地表覆盖物类型对应的第一标注图层,得到标注后的目标图像;其中,不同地表覆盖物类型对应的标注样式和标注图层不同,所述第一地表覆盖物类型为所述不同地表覆盖物类型中的任一种。