
一种微纳机器人定位追踪方法及装置.pdf

一只****懿呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种微纳机器人定位追踪方法及装置.pdf
本发明提供了一种微纳机器人定位追踪方法及装置,通过获取微纳机器人承载荧光激发光源激发出的光信号对应的光场数字图像,将所述光场数字图像拆分为多个光场子孔径图像,计算各个光场子孔径图像处于不同深度下的重聚焦图像,根据重聚焦图像得到所述微纳机器人当前所在的三维空间位置信息,重复上述获取光场数字图像至得到微纳机器人的三维空间位置信息的步骤,得到微纳机器人的运动轨迹。本发明将荧光显微成像技术与光场成像技术相结合,以数字图像处理方法进行解码并获取微纳机器人的位置信息,在保留了荧光显微成像高精度优势的同时扩展了纵向的成

一种机器人追踪方法及追踪装置.pdf
本发明公开了一种机器人追踪方法及追踪装置,图像采集模块与图像处理模块相连再连接至PLC控制器,定位模块、自动轨迹生成模块和红外避障传感模块与PLC控制器输入端相连,PLC控制器输出端与电机驱动模块、蜂鸣器和液晶显示模块相连,PLC控制器通过电机驱动模块驱动机器人行进,PLC控制器通过无线通信模块与远程终端双向通信。本发明提供的机器人追踪方法及追踪装置,在现有技术的机器人基础上进行改进,控制机器人自动模拟生成行进的轨迹曲线并避障行驶,通过图像采集并进行处理后传送至PLC控制器进行匹配处理,追踪所有目标工件的
一种车辆定位追踪装置以及方法、车辆.pdf
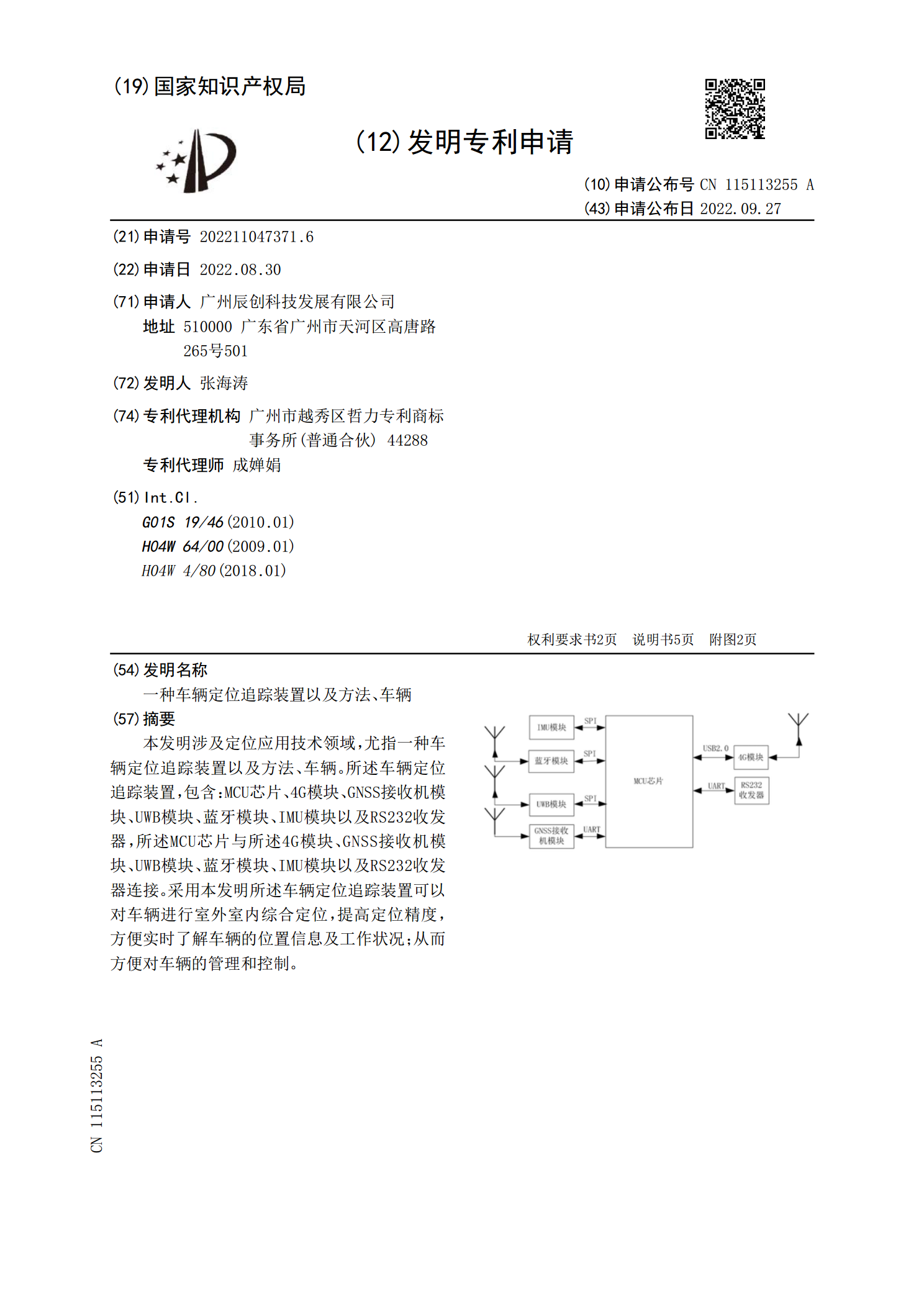
本发明涉及定位应用技术领域,尤指一种车辆定位追踪装置以及方法、车辆。所述车辆定位追踪装置,包含:MCU芯片、4G模块、GNSS接收机模块、UWB模块、蓝牙模块、IMU模块以及RS232收发器,所述MCU芯片与所述4G模块、GNSS接收机模块、UWB模块、蓝牙模块、IMU模块以及RS232收发器连接。采用本发明所述车辆定位追踪装置可以对车辆进行室外室内综合定位,提高定位精度,方便实时了解车辆的位置信息及工作状况;从而方便对车辆的管理和控制。

一种GNSS定位方法、观测目标定位方法、微位移监控方法、定位装置、微位移监控装置.pdf
本发明公开了一种GNSS定位方法、观测目标定位方法、微位移监控方法、定位装置、微位移监控装置,涉及定位领域,解决了现有微位移观测装置不能提供监控目标位置信息的问题,其技术方案要点是:获取基准站的详细位置坐标后,通过测距仪和测距仪与观测目标的位置关系获取观测目标的位置坐标,同时获取精确的微位移量;达到精确定位基准站和观测目标的目的。

一种定位方法、装置及机器人.pdf
本发明实施例公开了一种定位方法、装置及机器人,所述方法在基于以自适应定位算法具有更高置信度的方式确定目标的预测目标位置后,获取所述目标的上一时刻目标位置,响应于所述预测目标位置和所述上一时刻目标位置间的距离差大于跳变阈值,基于以里程计数据具有更高置信度的方式确定所述目标的当前时刻目标位置,通过所述方法可以在检测出定位丢失问题时,及时更正错误的定位信息,以提高定位的准确性和可靠性。