
一种GNSS定位方法、观测目标定位方法、微位移监控方法、定位装置、微位移监控装置.pdf

黛娥****ak


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种GNSS定位方法、观测目标定位方法、微位移监控方法、定位装置、微位移监控装置.pdf
本发明公开了一种GNSS定位方法、观测目标定位方法、微位移监控方法、定位装置、微位移监控装置,涉及定位领域,解决了现有微位移观测装置不能提供监控目标位置信息的问题,其技术方案要点是:获取基准站的详细位置坐标后,通过测距仪和测距仪与观测目标的位置关系获取观测目标的位置坐标,同时获取精确的微位移量;达到精确定位基准站和观测目标的目的。
用于定位移动设备的方法和装置.pdf
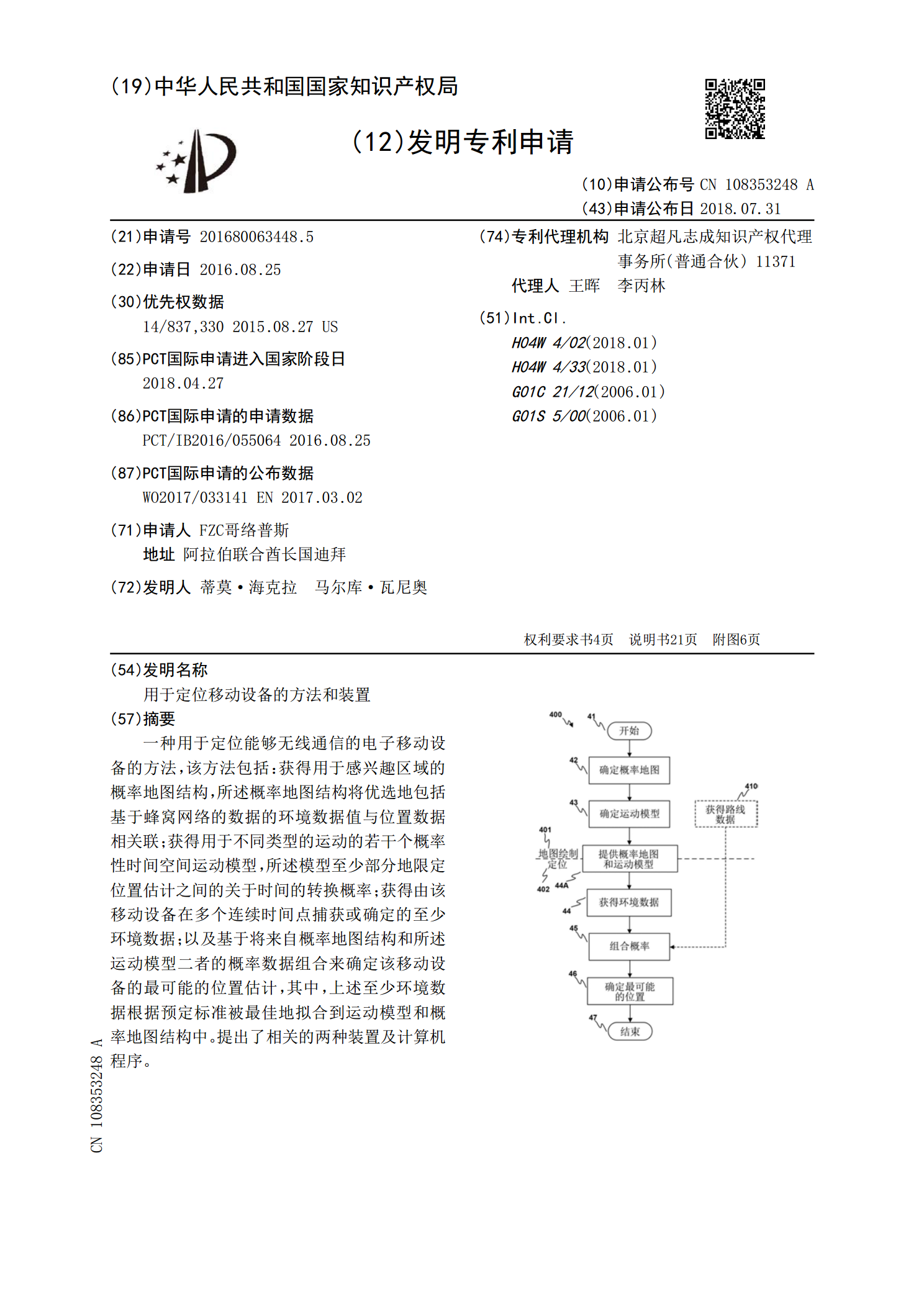
一种用于定位能够无线通信的电子移动设备的方法,该方法包括:获得用于感兴趣区域的概率地图结构,所述概率地图结构将优选地包括基于蜂窝网络的数据的环境数据值与位置数据相关联;获得用于不同类型的运动的若干个概率性时间空间运动模型,所述模型至少部分地限定位置估计之间的关于时间的转换概率;获得由该移动设备在多个连续时间点捕获或确定的至少环境数据;以及基于将来自概率地图结构和所述运动模型二者的概率数据组合来确定该移动设备的最可能的位置估计,其中,上述至少环境数据根据预定标准被最佳地拟合到运动模型和概率地图结构中。提出了
用于定位移动终端的方法和装置.pdf
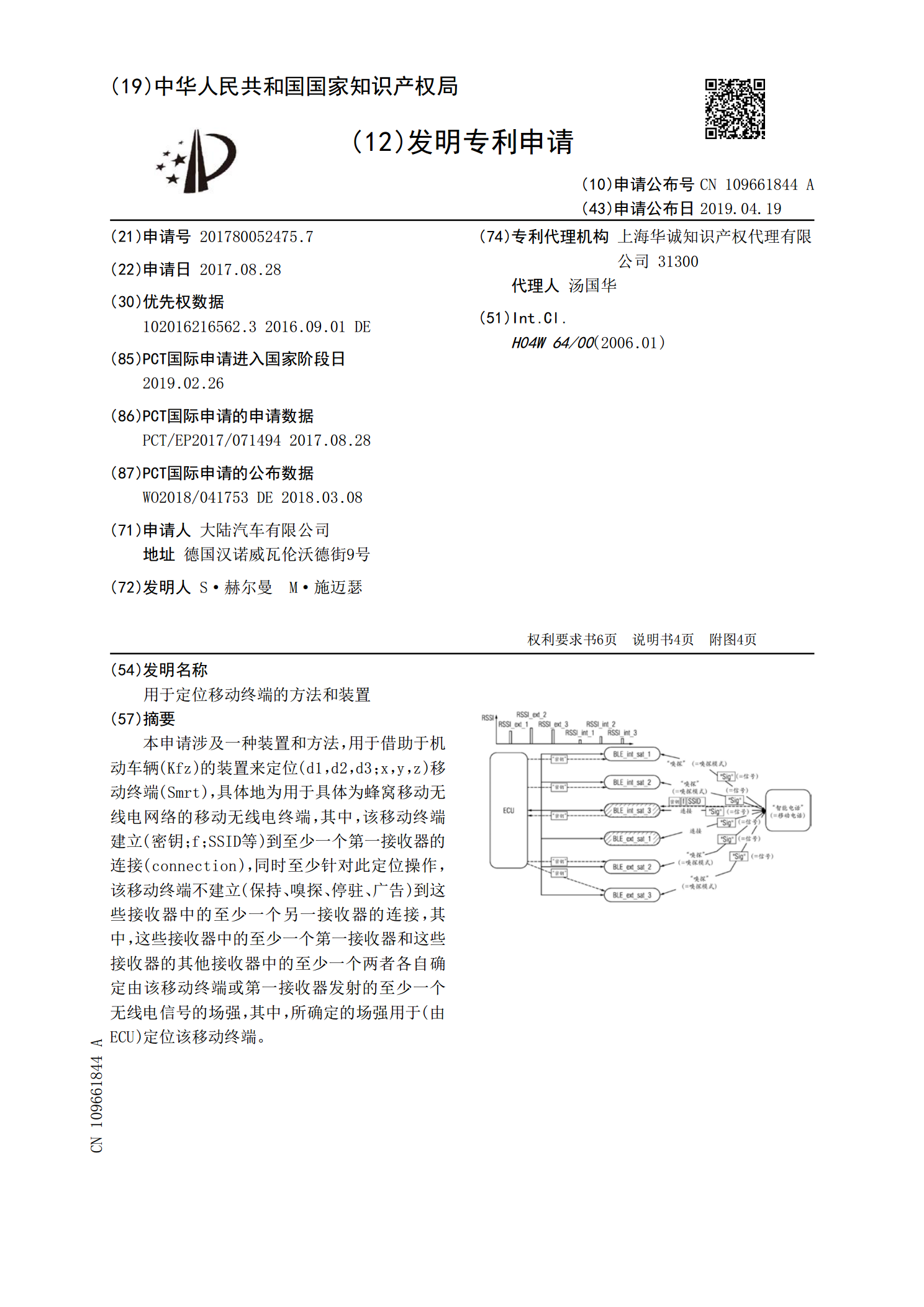
本申请涉及一种装置和方法,用于借助于机动车辆(Kfz)的装置来定位(d1,d2,d3;x,y,z)移动终端(Smrt),具体地为用于具体为蜂窝移动无线电网络的移动无线电终端,其中,该移动终端建立(密钥;f;SSID等)到至少一个第一接收器的连接(connection),同时至少针对此定位操作,该移动终端不建立(保持、嗅探、停驻、广告)到这些接收器中的至少一个另一接收器的连接,其中,这些接收器中的至少一个第一接收器和这些接收器的其他接收器中的至少一个两者各自确定由该移动终端或第一接收器发射的至少一个无线电信

一种物品定位方法、装置及监控系统.pdf
本申请提供一种物品定位方法、装置及监控系统,该方法包括:获取监控区域的监控画面,检测所述监控画面中的物品以及携带所述物品的目标对象;当检测到第一目标对象与第一物品分离,且持续分离状态满足第一预设条件时,确定所述第一物品为遗留物品,记录所述第一目标对象与所述第一物品的关联关系,并获取所述第一物品的位置信息;其中,所述第一目标对象为携带所述第一物品的对象。该方法可以为遗留物品的找回提供数据支持,提高遗留物品找回的效率。

轴位移定位方法.pdf
轴向位移、胀差的安装和调试关于轴向位移和胀差的方向及机械零位的确定安装间隙的确定条件:由于零位是在工作瓦及非工作瓦的正中心,并且需要将推力盘靠死工作瓦时来安装并定位两只轴位移传感器,差胀传感器也如此。方法:轴向位移和胀差的安装间隙的确定相当重要,要在掌握基本原理的基础上来确定此间隙就会变的相当容易,并方便的安装。下面介绍轴向位移安装间隙的确定方法。假定我们选用一个传感器,此传感器探头有效直径(除了线圈以外的)为8mm,间隙线性范围为4.5mm,传感器输入输出曲线如图1所示,电压输出-2V—20Vdc为线性