
一种定位方法、装置及机器人.pdf

Th****84


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种定位方法、装置及机器人.pdf
本发明实施例公开了一种定位方法、装置及机器人,所述方法在基于以自适应定位算法具有更高置信度的方式确定目标的预测目标位置后,获取所述目标的上一时刻目标位置,响应于所述预测目标位置和所述上一时刻目标位置间的距离差大于跳变阈值,基于以里程计数据具有更高置信度的方式确定所述目标的当前时刻目标位置,通过所述方法可以在检测出定位丢失问题时,及时更正错误的定位信息,以提高定位的准确性和可靠性。
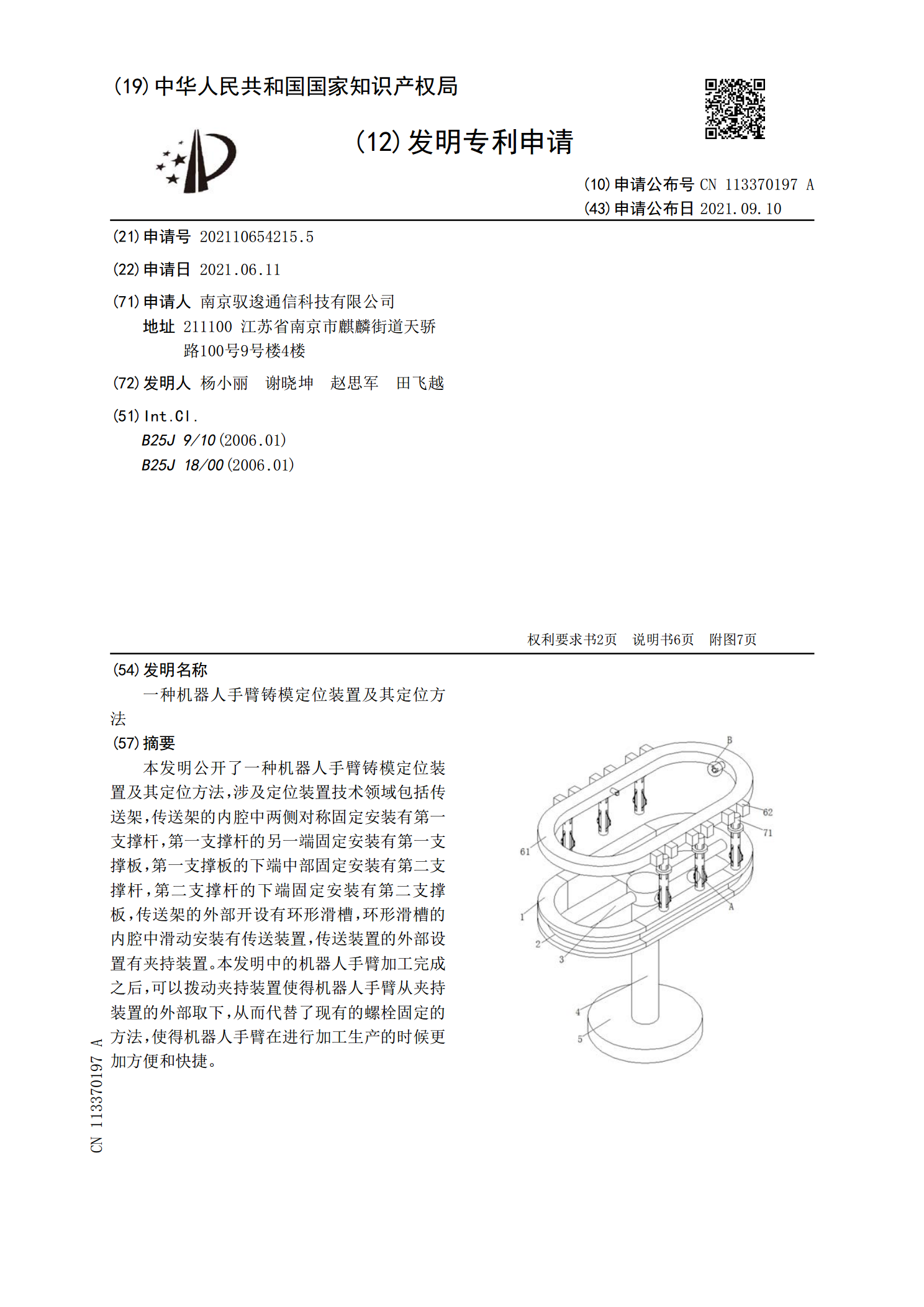
一种机器人手臂铸模定位装置及其定位方法.pdf
本发明公开了一种机器人手臂铸模定位装置及其定位方法,涉及定位装置技术领域包括传送架,传送架的内腔中两侧对称固定安装有第一支撑杆,第一支撑杆的另一端固定安装有第一支撑板,第一支撑板的下端中部固定安装有第二支撑杆,第二支撑杆的下端固定安装有第二支撑板,传送架的外部开设有环形滑槽,环形滑槽的内腔中滑动安装有传送装置,传送装置的外部设置有夹持装置。本发明中的机器人手臂加工完成之后,可以拨动夹持装置使得机器人手臂从夹持装置的外部取下,从而代替了现有的螺栓固定的方法,使得机器人手臂在进行加工生产的时候更加方便和快捷。
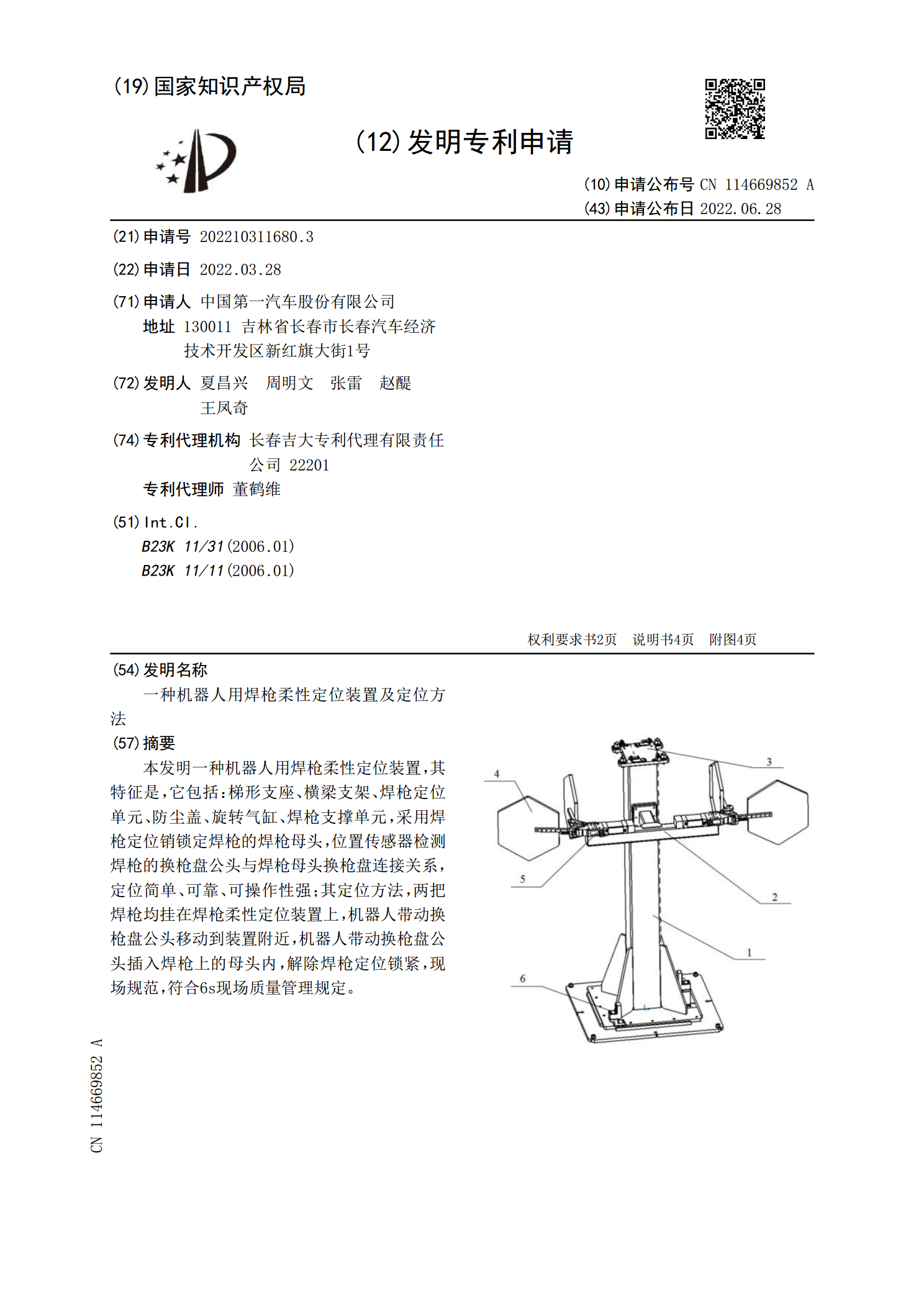
一种机器人用焊枪柔性定位装置及定位方法.pdf
本发明一种机器人用焊枪柔性定位装置,其特征是,它包括:梯形支座、横梁支架、焊枪定位单元、防尘盖、旋转气缸、焊枪支撑单元,采用焊枪定位销锁定焊枪的焊枪母头,位置传感器检测焊枪的换枪盘公头与焊枪母头换枪盘连接关系,定位简单、可靠、可操作性强;其定位方法,两把焊枪均挂在焊枪柔性定位装置上,机器人带动换枪盘公头移动到装置附近,机器人带动换枪盘公头插入焊枪上的母头内,解除焊枪定位锁紧,现场规范,符合6s现场质量管理规定。

一种机器人相对定位方法和装置.pdf
本发明提供了一种机器人相对定位方法和装置,所述机器人相对定位方法,包括:使第一机器人和第二机器人之间的相对距离小于或等于预设距离;控制所述第一机器人使用激光测距传感器向所述第二机器人发射测距光;检测所述测距光获取的距离是否相等;若否,则调整所述第二机器人的相对姿态,并再次检测所述测距光获取的距离是否相等;若是,则所述第一机器人和所述第二机器人实现对接姿态;控制所述第一机器人和所述第二机器人减少相对距离并进行对接。本发明能针对机器人对接进行了优化,通过激光测距差来调整对接姿态和相对距离,使对接视野不受机器人

一种手术机器人导航定位方法及装置.pdf
本发明实施例提供了一种手术机器人导航定位方法及装置,涉及数据处理技术领域,上述方法包括:获得多张二维图像;对各二维图像与目标对象的三维图像进行图像配准,得到第一转换关系;识别各二维图像中的标识物,得到标识物的图像位置;根据所得的各图像位置、标识物在标定坐标系下的标定位置以及第二转换关系,计算第三转换关系;基于第一转换关系以及第三转换关系,将依据三维图像规划出的手术路径转换为目标坐标系下的目标路径;根据目标路径,对手术机器人进行导航定位。应用本发明实施例提供的手术机器人导航定位方案,能够对手术机器人进行导航