
借助驾驶员辅助系统实施车辆泊车过程的方法.pdf

Jo****31


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

借助驾驶员辅助系统实施车辆泊车过程的方法.pdf
本发明涉及一种借助驾驶员辅助系统实施车辆(1)自动泊车过程的方法。在自动泊车过程开始时,给车辆(1)中的驾驶员辅助系统使用者提供了在至少两种泊车操纵中选择的可能性。第一泊车操纵是一种直接泊车操纵,其中,从起始位置(9)直接到目标位置(10)沿轨迹(8)实施自动泊车过程。在另一泊车操纵中,确定沿轨迹(12)的保持点(11),该保持点(11)用于使用者下车。

车辆自主泊车方法、实施该方法的驾驶员辅助装置以及具有该驾驶员辅助装置的车辆.pdf
本发明涉及一种实施车辆自主泊车过程的方法,其中,在车辆外的操作人员和车辆之间存在一通信连接,通过该通信连接可以传输至少一个激活车辆自主泊车过程的命令,其特征在于,在车辆开始自主泊车过程之前,将车辆的目标位置和/或最后的移动轨迹保存在合适的装置中,在第一次激活自主泊车过程之后,车辆根据储存装置中保存的数据自主从起始位置实施泊车过程。
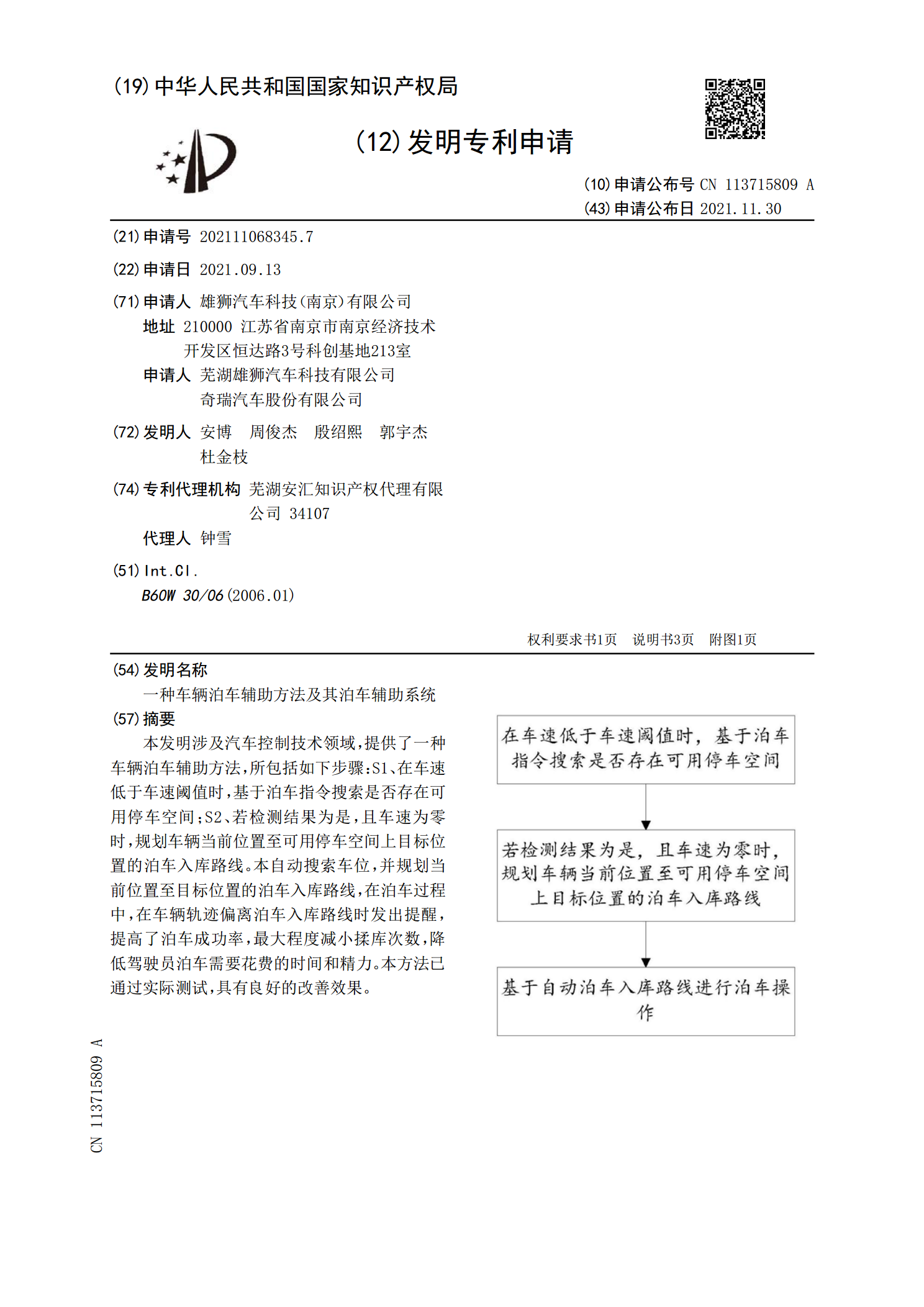
一种车辆泊车辅助方法及其泊车辅助系统.pdf
本发明涉及汽车控制技术领域,提供了一种车辆泊车辅助方法,所包括如下步骤:S1、在车速低于车速阈值时,基于泊车指令搜索是否存在可用停车空间;S2、若检测结果为是,且车速为零时,规划车辆当前位置至可用停车空间上目标位置的泊车入库路线。本自动搜索车位,并规划当前位置至目标位置的泊车入库路线,在泊车过程中,在车辆轨迹偏离泊车入库路线时发出提醒,提高了泊车成功率,最大程度减小揉库次数,降低驾驶员泊车需要花费的时间和精力。本方法已通过实际测试,具有良好的改善效果。
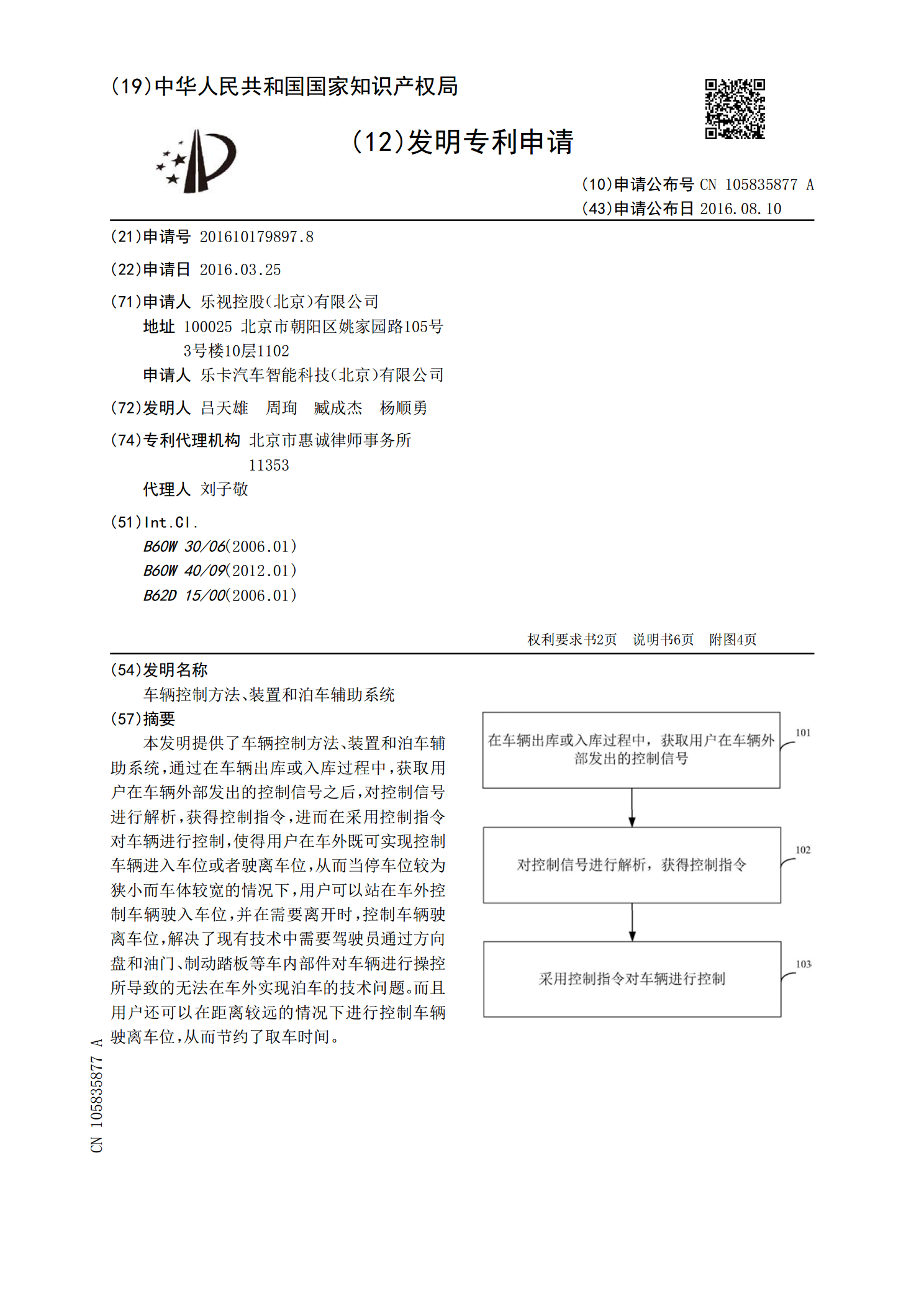
车辆控制方法、装置和泊车辅助系统.pdf
本发明提供了车辆控制方法、装置和泊车辅助系统,通过在车辆出库或入库过程中,获取用户在车辆外部发出的控制信号之后,对控制信号进行解析,获得控制指令,进而在采用控制指令对车辆进行控制,使得用户在车外既可实现控制车辆进入车位或者驶离车位,从而当停车位较为狭小而车体较宽的情况下,用户可以站在车外控制车辆驶入车位,并在需要离开时,控制车辆驶离车位,解决了现有技术中需要驾驶员通过方向盘和油门、制动踏板等车内部件对车辆进行操控所导致的无法在车外实现泊车的技术问题。而且用户还可以在距离较远的情况下进行控制车辆驶离车位,从

泊车辅助系统及泊车方法.pdf
本发明公开了一种泊车辅助系统及泊车方法。其中,系统包括:通讯模块、图像采集模块和图像处理模块;通讯模块,用于接收车辆发送的短消息集,根据短消息集向图像采集模块发送启动信号;接收图像处理模块传输的处理后的图像,将处理后的图像发送至车辆,以供车辆根据处理后的图像进行泊车;图像采集模块,用于根据启动信号进行车辆驶入车库的图像采集,将图像传输至图像处理模块;图像处理模块,用于对图像进行校正和压缩处理,将处理后的图像传输至通讯模块。本发明实现了实时传输图像,使驾驶员根据传输的图像进行泊车,而且无需进行图像拼接,成本