
一种车辆泊车辅助方法及其泊车辅助系统.pdf

努力****恨风

1/6

2/6
3/6

4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种车辆泊车辅助方法及其泊车辅助系统.pdf
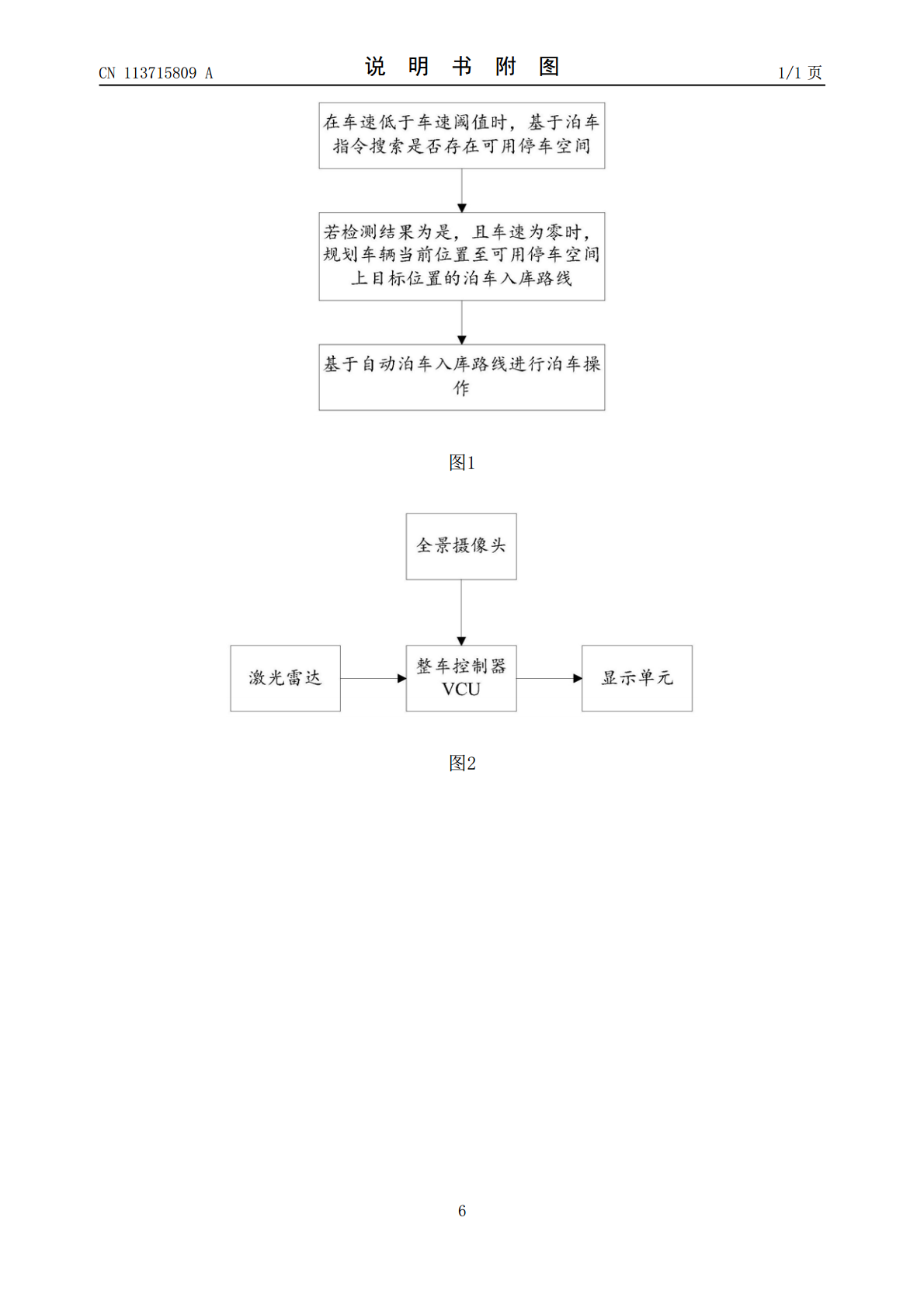
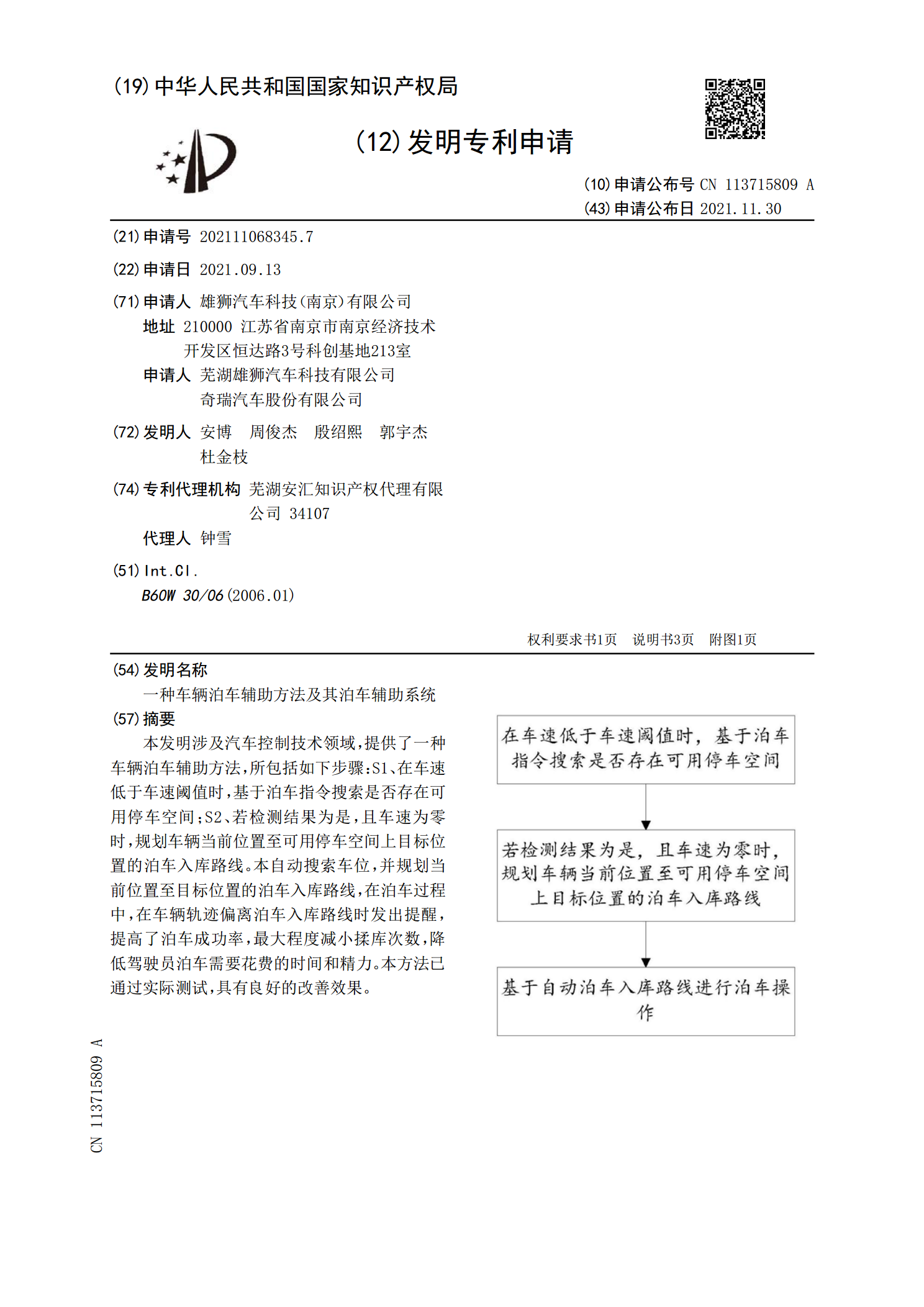
本发明涉及汽车控制技术领域,提供了一种车辆泊车辅助方法,所包括如下步骤:S1、在车速低于车速阈值时,基于泊车指令搜索是否存在可用停车空间;S2、若检测结果为是,且车速为零时,规划车辆当前位置至可用停车空间上目标位置的泊车入库路线。本自动搜索车位,并规划当前位置至目标位置的泊车入库路线,在泊车过程中,在车辆轨迹偏离泊车入库路线时发出提醒,提高了泊车成功率,最大程度减小揉库次数,降低驾驶员泊车需要花费的时间和精力。本方法已通过实际测试,具有良好的改善效果。
一种辅助泊车装置、系统及辅助泊车方法.pdf
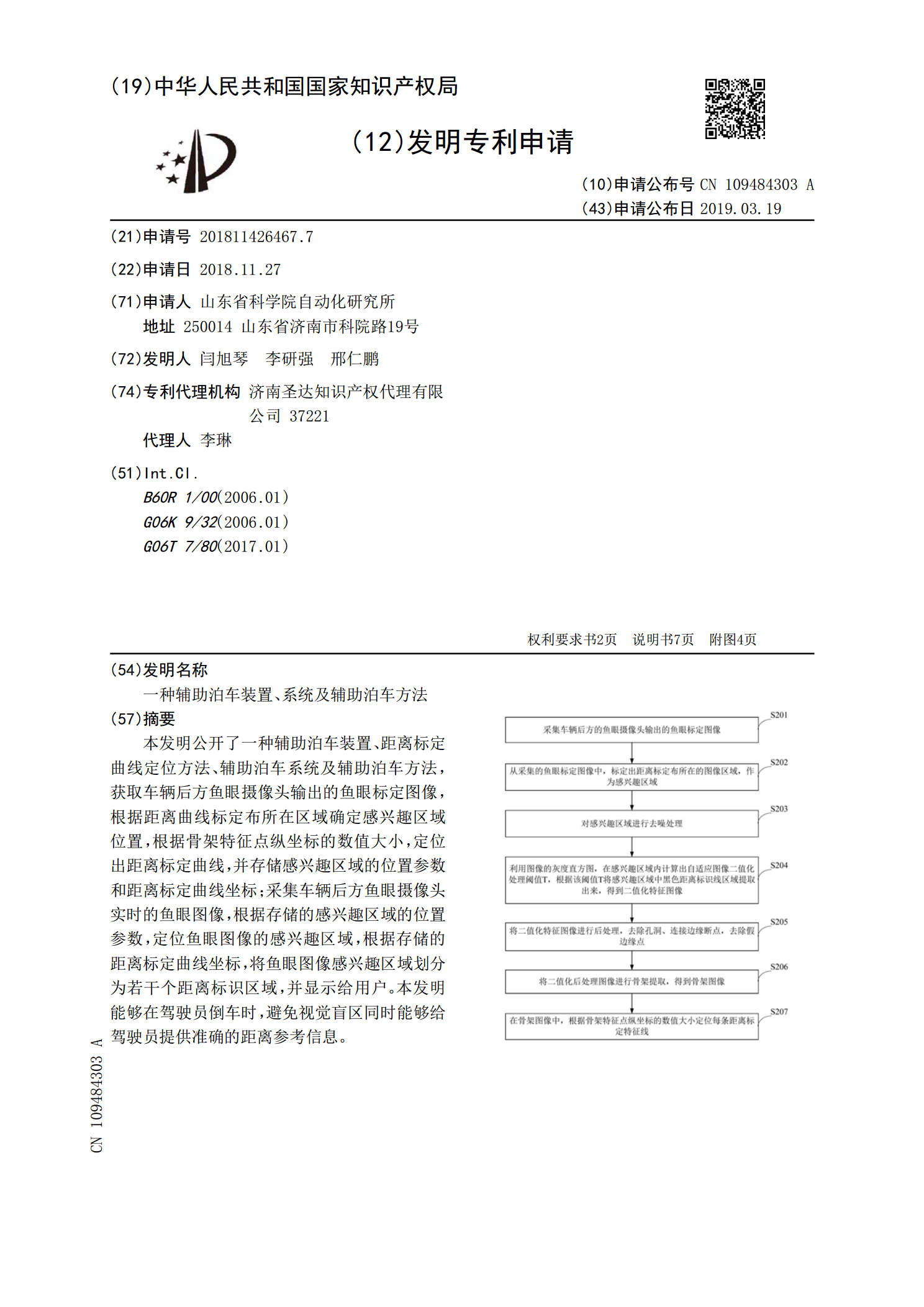
本发明公开了一种辅助泊车装置、距离标定曲线定位方法、辅助泊车系统及辅助泊车方法,获取车辆后方鱼眼摄像头输出的鱼眼标定图像,根据距离曲线标定布所在区域确定感兴趣区域位置,根据骨架特征点纵坐标的数值大小,定位出距离标定曲线,并存储感兴趣区域的位置参数和距离标定曲线坐标;采集车辆后方鱼眼摄像头实时的鱼眼图像,根据存储的感兴趣区域的位置参数,定位鱼眼图像的感兴趣区域,根据存储的距离标定曲线坐标,将鱼眼图像感兴趣区域划分为若干个距离标识区域,并显示给用户。本发明能够在驾驶员倒车时,避免视觉盲区同时能够给驾驶员提供准

泊车辅助系统及泊车方法.pdf
本发明公开了一种泊车辅助系统及泊车方法。其中,系统包括:通讯模块、图像采集模块和图像处理模块;通讯模块,用于接收车辆发送的短消息集,根据短消息集向图像采集模块发送启动信号;接收图像处理模块传输的处理后的图像,将处理后的图像发送至车辆,以供车辆根据处理后的图像进行泊车;图像采集模块,用于根据启动信号进行车辆驶入车库的图像采集,将图像传输至图像处理模块;图像处理模块,用于对图像进行校正和压缩处理,将处理后的图像传输至通讯模块。本发明实现了实时传输图像,使驾驶员根据传输的图像进行泊车,而且无需进行图像拼接,成本
泊车辅助方法和泊车辅助装置.pdf
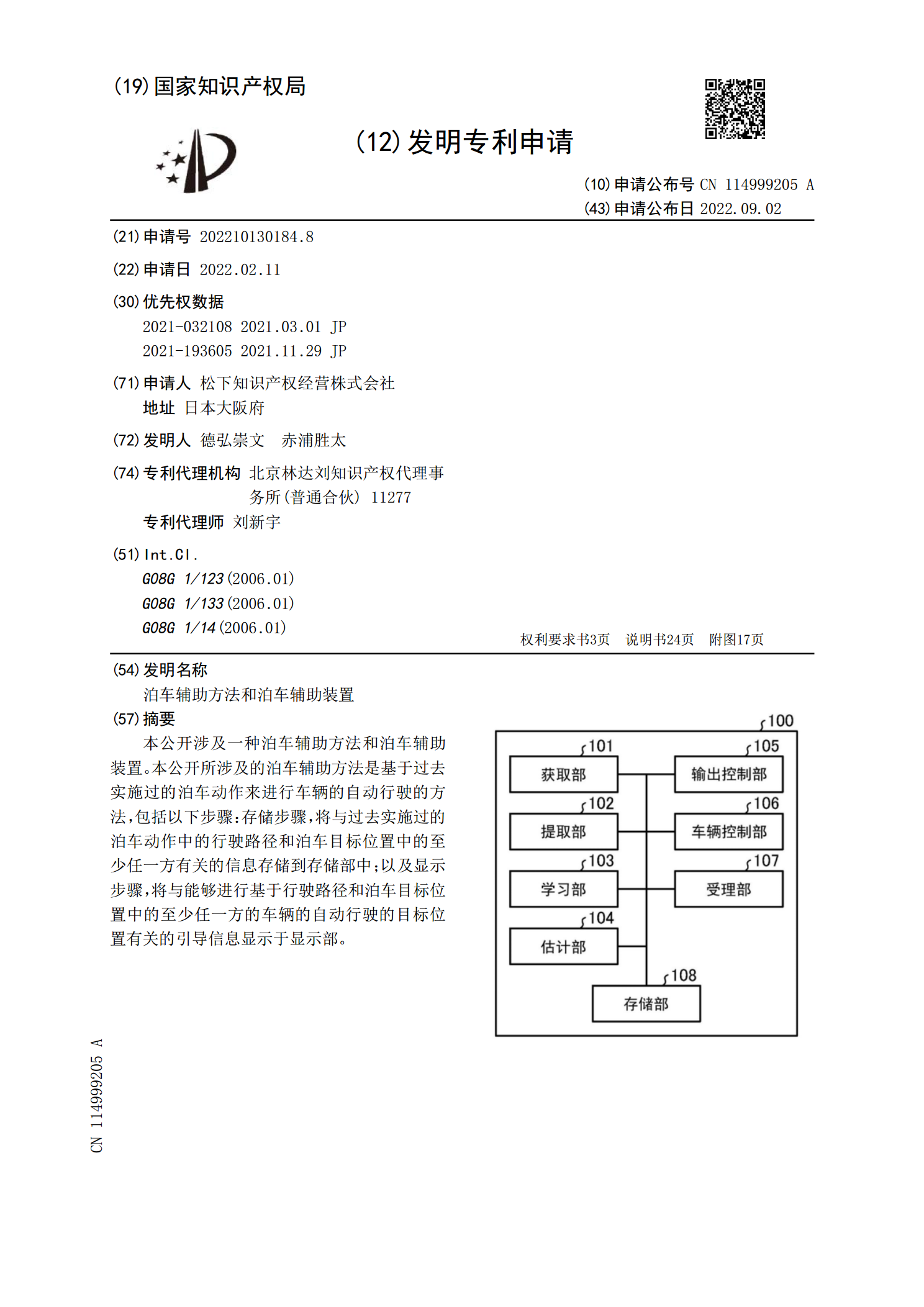
本公开涉及一种泊车辅助方法和泊车辅助装置。本公开所涉及的泊车辅助方法是基于过去实施过的泊车动作来进行车辆的自动行驶的方法,包括以下步骤:存储步骤,将与过去实施过的泊车动作中的行驶路径和泊车目标位置中的至少任一方有关的信息存储到存储部中;以及显示步骤,将与能够进行基于行驶路径和泊车目标位置中的至少任一方的车辆的自动行驶的目标位置有关的引导信息显示于显示部。

一种辅助泊车系统及其控制方法.pdf
本发明揭示了一种辅助泊车系统及其控制方法,系统设有泊车控制器,通过CAN总线获得方向盘转角传感器、制动控制器和电喷控制器的信号,通过串行接口获得后雷达控制器和前雷达控制器的信号,通过线束获得侧面超声波传感器和轮速传感器信号,并通过线束与泊车模式选择按钮连接,所述的泊车控制器由泊车模式选择按钮控制启动处理获得的信号,并输出命令至泊车控制器内部的蜂鸣器、语音装置以及显示器辅助驾驶员泊车。该系统利用的信号大都来自于车辆原有资源,节约了成本,泊车控制方式可根据需要自助选择,辅助泊车的控制方法也简单合理,即能减小控