
混合动力车辆的爬行扭矩的控制方法及混合动力车辆.pdf

小沛****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

混合动力车辆的爬行扭矩的控制方法及混合动力车辆.pdf
本发明涉及混合动力车辆领域,具体地涉及混合动力车辆的爬行扭矩的控制方法及混合动力车辆。该混合动力车辆具体为配置有双离合变速器的基于P2架构的混合动力车辆,其爬行扭矩的控制方法包括:获得期望的目标爬行扭矩;控制混合动力车辆的发动机输出恒定的实际发动机扭矩;以及根据目标爬行扭矩与实际发动机扭矩之间的关系对混合动力车辆的电机进行动态控制以获得与目标爬行扭矩对应的实际爬行扭矩。这样,本发明提供了一种新型的混合动力车辆的爬行扭矩的控制方法及混合动力车辆,通过使发动机输出恒定的扭矩并且动态控制电机输出的扭矩能够使得对
混合动力车辆的扭矩传递控制方法、系统及混合动力车辆.pdf
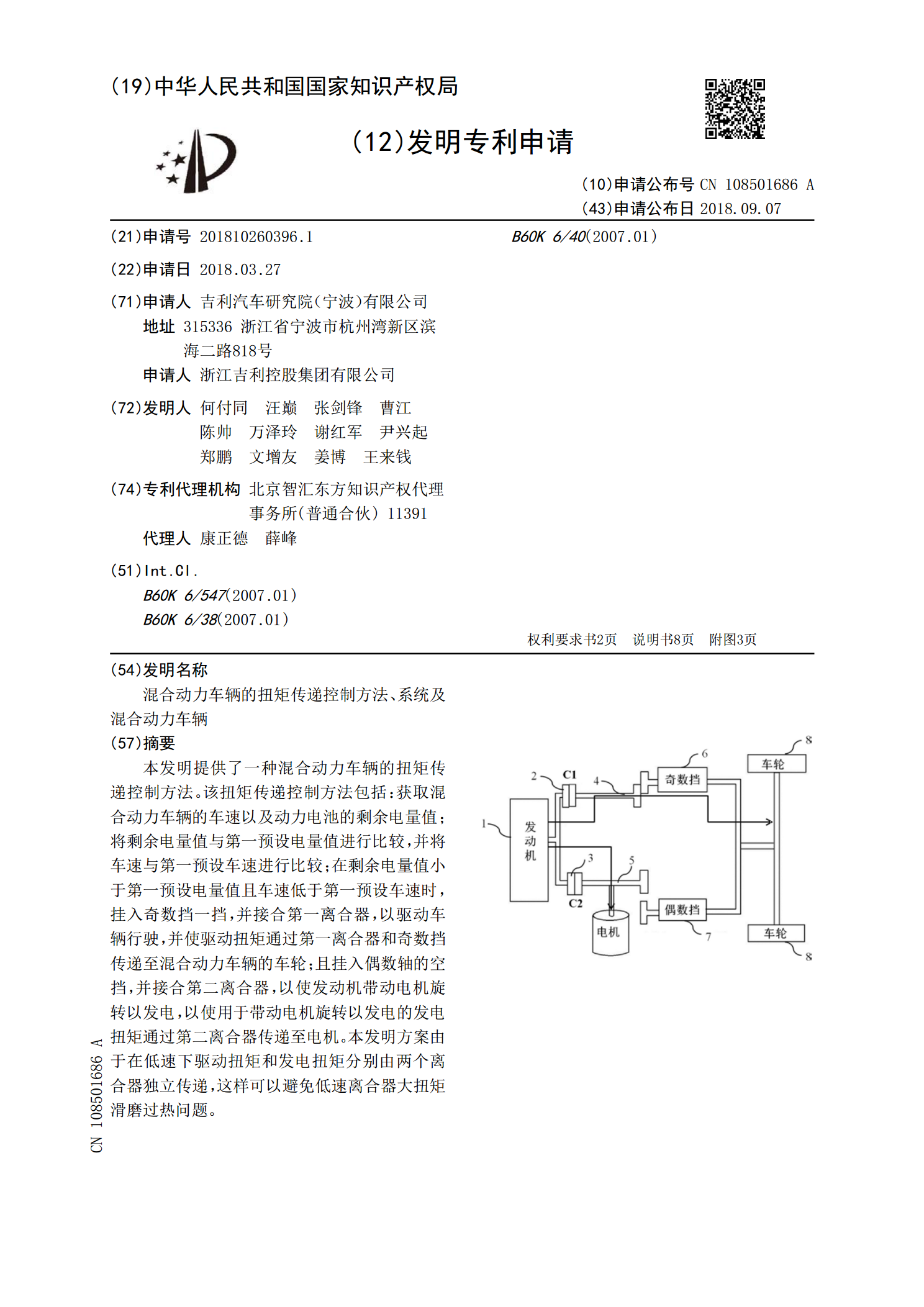
本发明提供了一种混合动力车辆的扭矩传递控制方法。该扭矩传递控制方法包括:获取混合动力车辆的车速以及动力电池的剩余电量值;将剩余电量值与第一预设电量值进行比较,并将车速与第一预设车速进行比较;在剩余电量值小于第一预设电量值且车速低于第一预设车速时,挂入奇数挡一挡,并接合第一离合器,以驱动车辆行驶,并使驱动扭矩通过第一离合器和奇数挡传递至混合动力车辆的车轮;且挂入偶数轴的空挡,并接合第二离合器,以使发动机带动电机旋转以发电,以使用于带动电机旋转以发电的发电扭矩通过第二离合器传递至电机。本发明方案由于在低速下驱
混合动力车辆以及控制混合动力车辆的方法.pdf
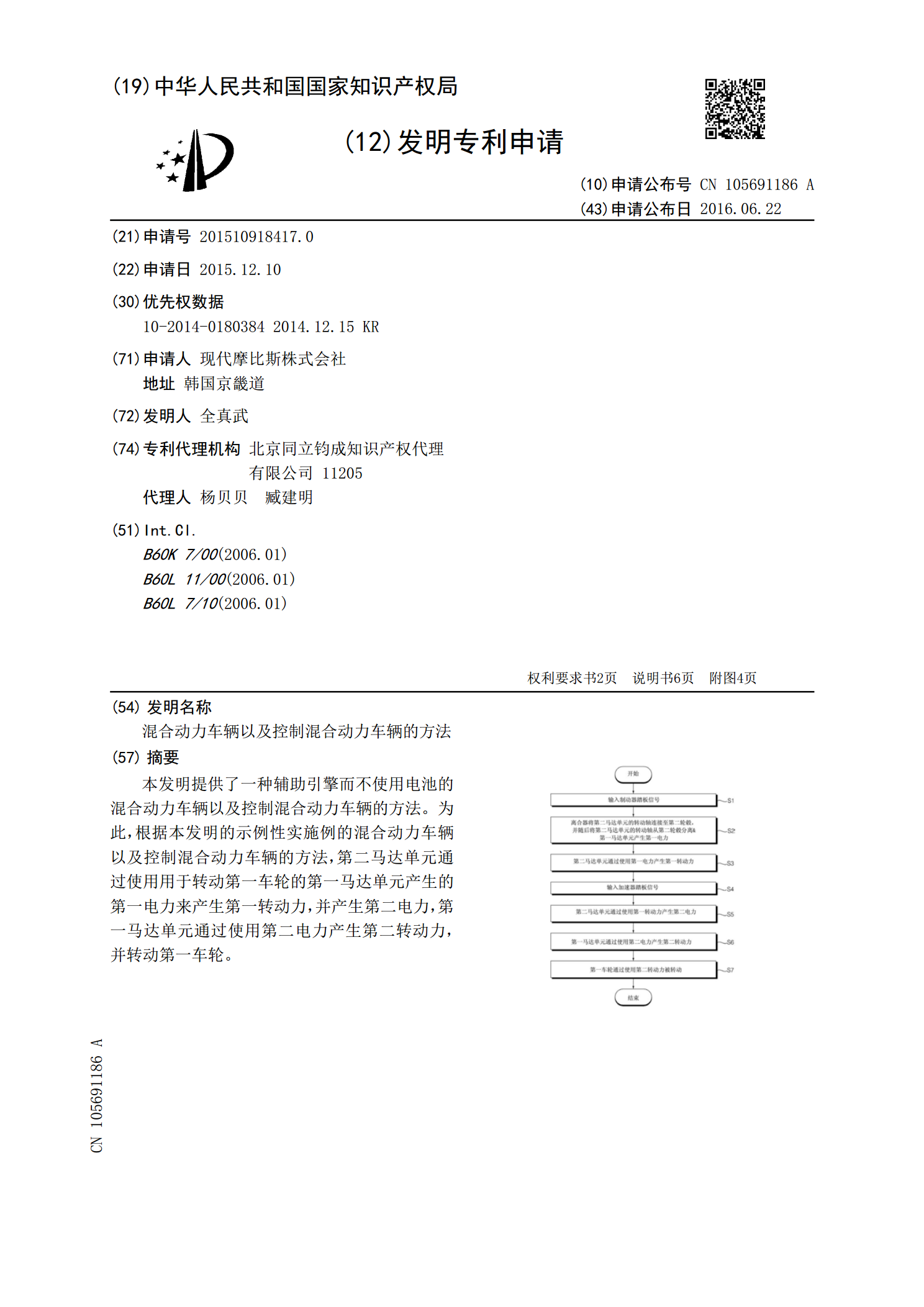
本发明提供了一种辅助引擎而不使用电池的混合动力车辆以及控制混合动力车辆的方法。为此,根据本发明的示例性实施例的混合动力车辆以及控制混合动力车辆的方法,第二马达单元通过使用用于转动第一车轮的第一马达单元产生的第一电力来产生第一转动力,并产生第二电力,第一马达单元通过使用第二电力产生第二转动力,并转动第一车轮。

混合动力车辆的扭矩调节控制.pdf
本发明公开一种混合动力车辆的扭矩调节控制。机动车辆的动力系统包括:发动机;第一电机和第二电机,每个机器都可以选择性地作为发动机和发电机运行;变速器,具有可驱动地连接至发动机和第一电机的输入和可驱动地连接至第二电机和车辆的车轮的传动输出。本发明公开用于控制动力系统的方法,该方法包括:使用发动机产生车轮扭矩;使用变速器来执行换档;如果在换档期间调节扭矩的同时发生动力系统输出扭矩的降低,则使第一电机和第二电机中的一个作为发电机运行,以降低动力传动系统输出扭矩,而如果在换档期间调节扭矩的同时发生动力

混合动力车辆的控制方法和混合动力车辆的控制装置.pdf
混合动力车辆的控制方法为具备利用发动机的动力对蓄电池进行充电的发电机以及利用蓄电池的电力对驱动轮进行驱动的电动马达的混合动力车辆的控制方法。控制方法用于控制发电机和电动马达,并且接受用于设定通常模式、再生行驶模式以及静音模式中的任一个模式的模式设定,该再生行驶模式为与通常模式相比由电动马达产生的再生制动力较大的模式,该静音模式为限制利用发动机进行的充电的模式,在设定了通常模式的情况下,不接受静音模式的设定,在设定了再生行驶模式的情况下,接受静音模式的设定。