
用于铰接式卡车的自主转向系统.pdf

小琛****82


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于铰接式卡车的自主转向系统.pdf
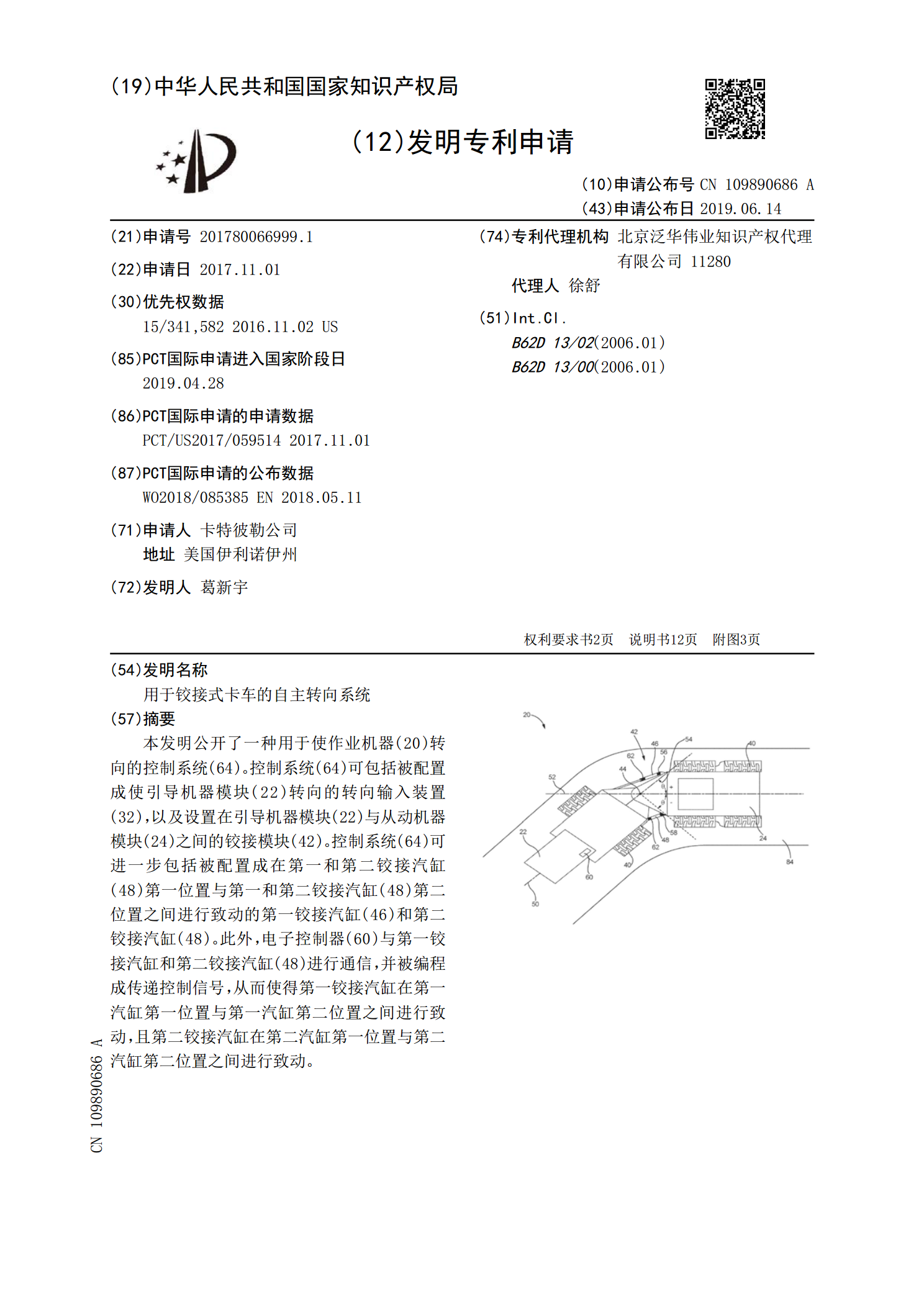
本发明公开了一种用于使作业机器(20)转向的控制系统(64)。控制系统(64)可包括被配置成使引导机器模块(22)转向的转向输入装置(32),以及设置在引导机器模块(22)与从动机器模块(24)之间的铰接模块(42)。控制系统(64)可进一步包括被配置成在第一和第二铰接汽缸(48)第一位置与第一和第二铰接汽缸(48)第二位置之间进行致动的第一铰接汽缸(46)和第二铰接汽缸(48)。此外,电子控制器(60)与第一铰接汽缸和第二铰接汽缸(48)进行通信,并被编程成传递控制信号,从而使得第一铰接汽缸在第一汽缸第
用于叉车的铰接式转向装置.pdf
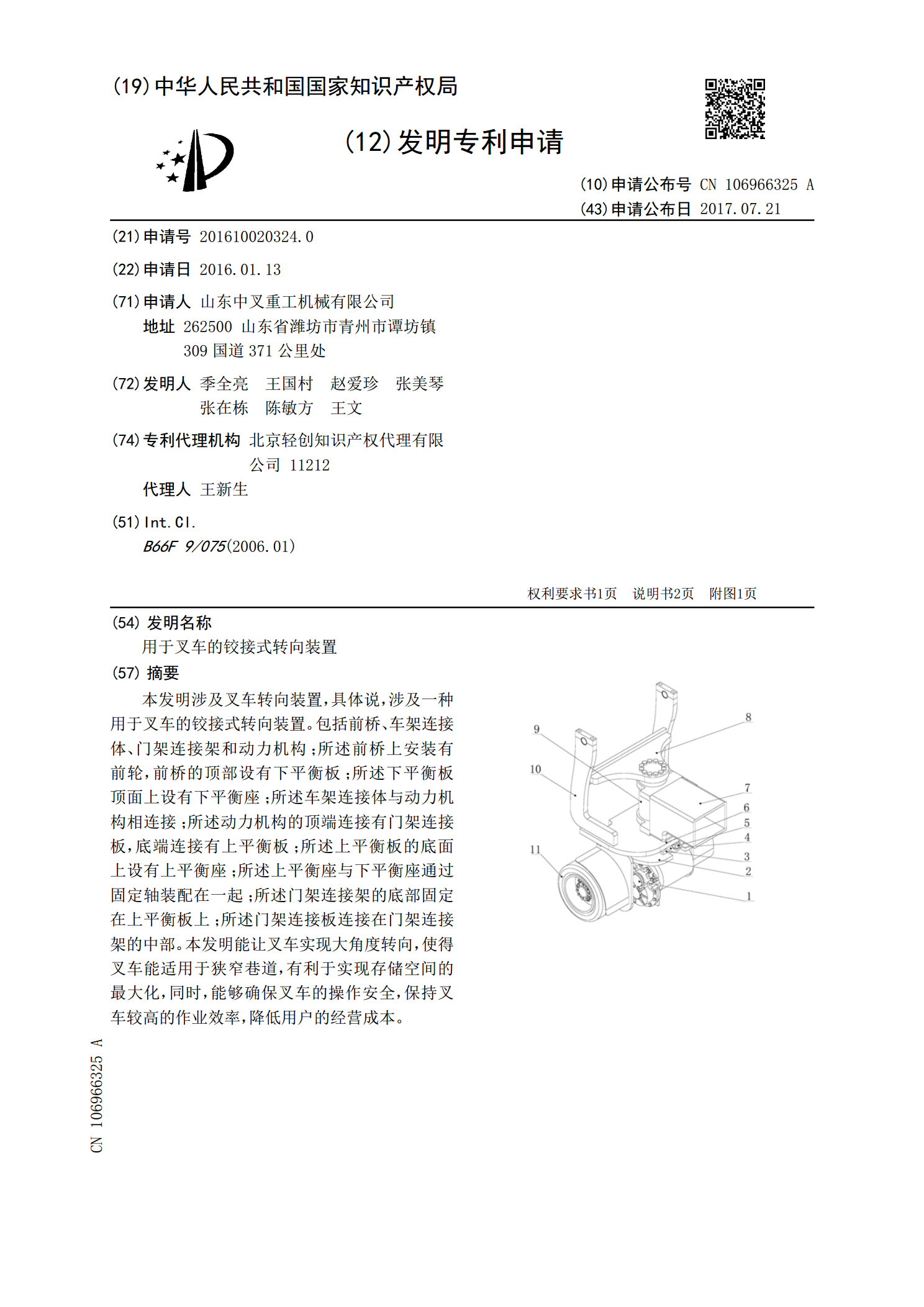
本发明涉及叉车转向装置,具体说,涉及一种用于叉车的铰接式转向装置。包括前桥、车架连接体、门架连接架和动力机构;所述前桥上安装有前轮,前桥的顶部设有下平衡板;所述下平衡板顶面上设有下平衡座;所述车架连接体与动力机构相连接;所述动力机构的顶端连接有门架连接板,底端连接有上平衡板;所述上平衡板的底面上设有上平衡座;所述上平衡座与下平衡座通过固定轴装配在一起;所述门架连接架的底部固定在上平衡板上;所述门架连接板连接在门架连接架的中部。本发明能让叉车实现大角度转向,使得叉车能适用于狭窄巷道,有利于实现存储空间的最大

用于矿用卡车的转向系统和操作方法.pdf
操作矿用卡车(10)包括接收指示电车接通可用的廊道中的预期的方向改变的数据,以及响应于该数据向矿用卡车的转向机构(32)输出控制命令。响应于控制命令从与廊道的第一部分一致的第一航向朝向与廊道的后续部分一致的第二航向转向矿用卡车(10)。相关的矿用卡车(10)和转向系统(32)被公开。

用于铰接式车辆的制动系统.pdf
本发明公开了一种用于铰接式车辆的制动系统。所述制动系统包括联接到牵引装置(14)的制动组件(102),所述制动组件被配置成基于液压机械压力信号(106)和机电压力信号(108)中的一个来施加制动组件压力(104)。截止阀(118)被配置成在关闭时阻止液压机械压力信号。制动控制器(120)被配置成传输被配置成关闭所述截止阀的隔离信号(122),并传输基于命令的ABS制动压力的ABS控制信号(116)。
铰接式转向架.pdf
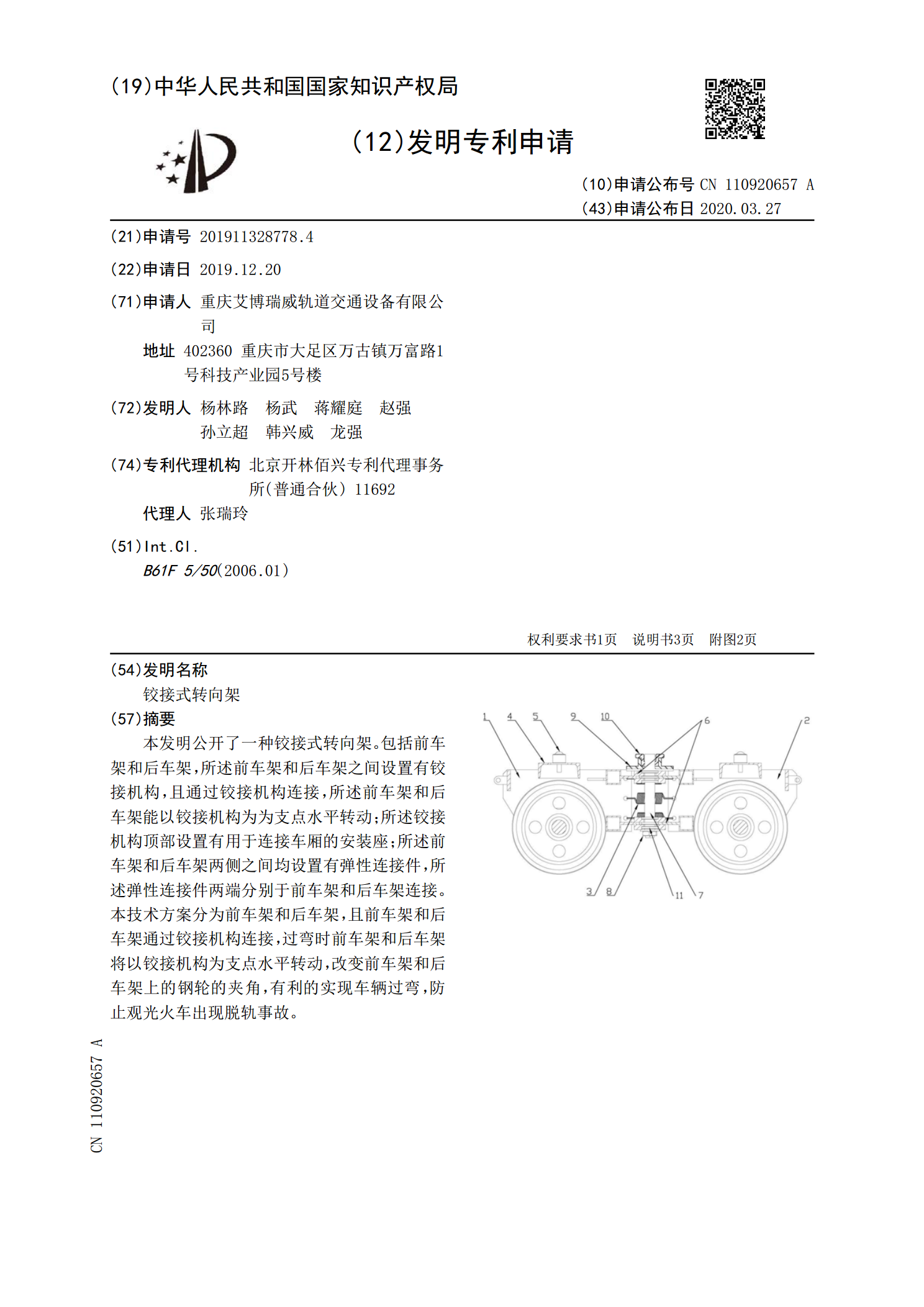
本发明公开了一种铰接式转向架。包括前车架和后车架,所述前车架和后车架之间设置有铰接机构,且通过铰接机构连接,所述前车架和后车架能以铰接机构为为支点水平转动;所述铰接机构顶部设置有用于连接车厢的安装座;所述前车架和后车架两侧之间均设置有弹性连接件,所述弹性连接件两端分别于前车架和后车架连接。本技术方案分为前车架和后车架,且前车架和后车架通过铰接机构连接,过弯时前车架和后车架将以铰接机构为支点水平转动,改变前车架和后车架上的钢轮的夹角,有利的实现车辆过弯,防止观光火车出现脱轨事故。