
操作驾驶辅助系统的方法和具有适于实施该方法的驾驶辅助系统的车辆.pdf

波峻****99


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

操作驾驶辅助系统的方法和具有适于实施该方法的驾驶辅助系统的车辆.pdf
本发明涉及一种操作用于车辆(1)的驾驶辅助系统(2)的方法,其中为了确定所述车辆(1)在数字环境地图中的位置,借助车辆自有的传感器系统(1.1)检测车辆(1)的环境数据(D
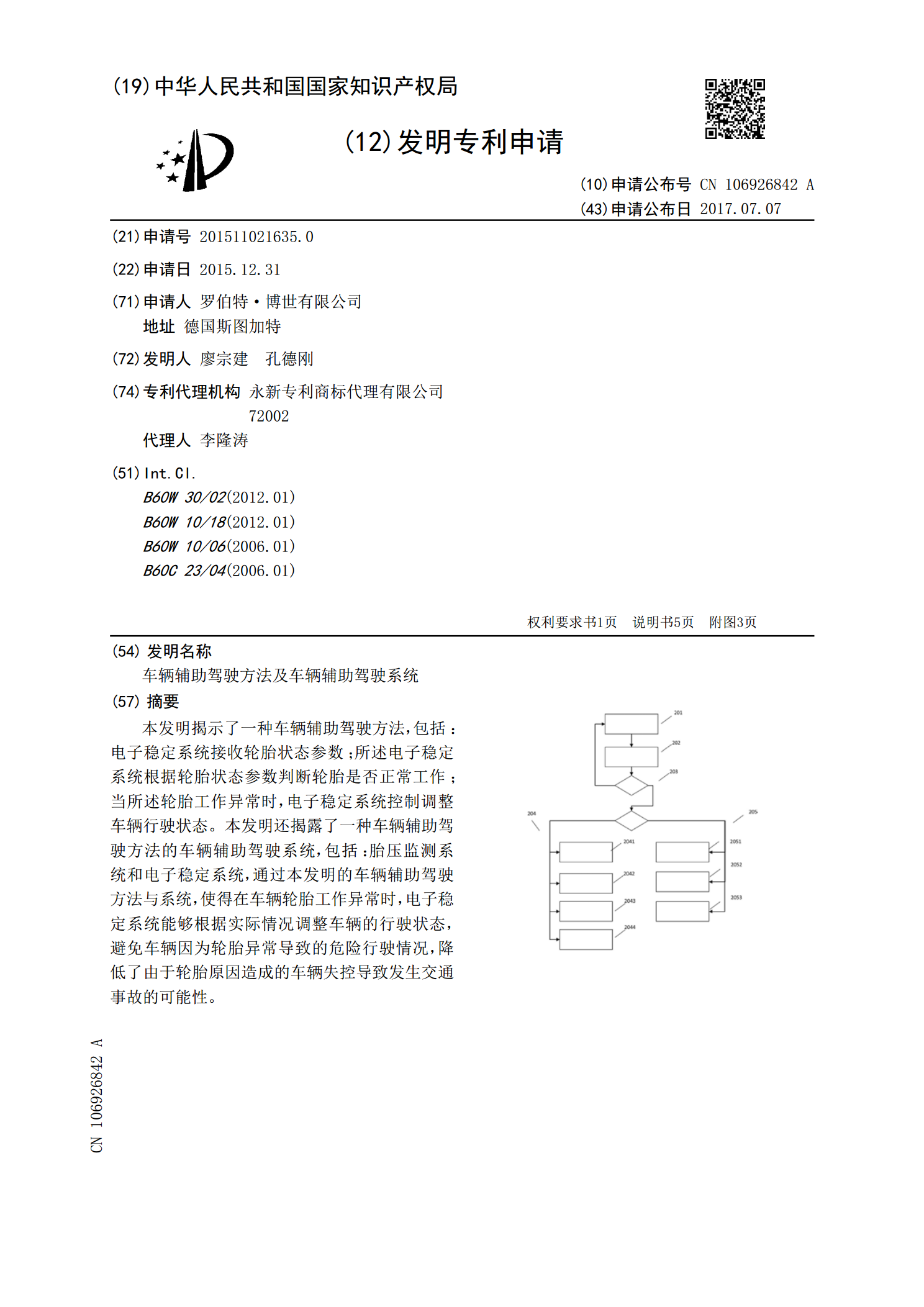
车辆辅助驾驶方法及车辆辅助驾驶系统.pdf
本发明揭示了一种车辆辅助驾驶方法,包括:电子稳定系统接收轮胎状态参数;所述电子稳定系统根据轮胎状态参数判断轮胎是否正常工作;当所述轮胎工作异常时,电子稳定系统控制调整车辆行驶状态。本发明还揭露了一种车辆辅助驾驶方法的车辆辅助驾驶系统,包括:胎压监测系统和电子稳定系统,通过本发明的车辆辅助驾驶方法与系统,使得在车辆轮胎工作异常时,电子稳定系统能够根据实际情况调整车辆的行驶状态,避免车辆因为轮胎异常导致的危险行驶情况,降低了由于轮胎原因造成的车辆失控导致发生交通事故的可能性。
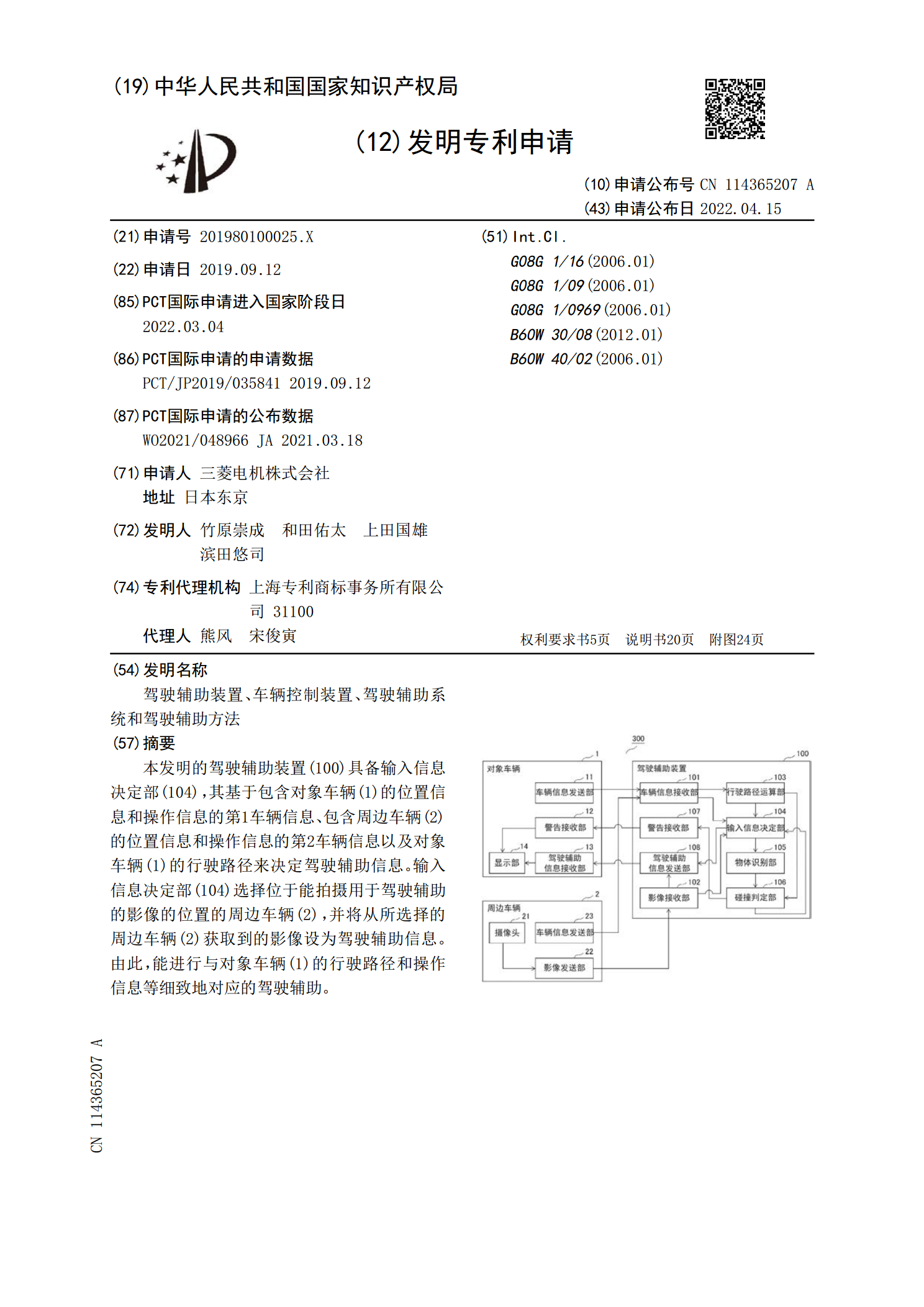
驾驶辅助装置、车辆控制装置、驾驶辅助系统和驾驶辅助方法.pdf
本发明的驾驶辅助装置(100)具备输入信息决定部(104),其基于包含对象车辆(1)的位置信息和操作信息的第1车辆信息、包含周边车辆(2)的位置信息和操作信息的第2车辆信息以及对象车辆(1)的行驶路径来决定驾驶辅助信息。输入信息决定部(104)选择位于能拍摄用于驾驶辅助的影像的位置的周边车辆(2),并将从所选择的周边车辆(2)获取到的影像设为驾驶辅助信息。由此,能进行与对象车辆(1)的行驶路径和操作信息等细致地对应的驾驶辅助。
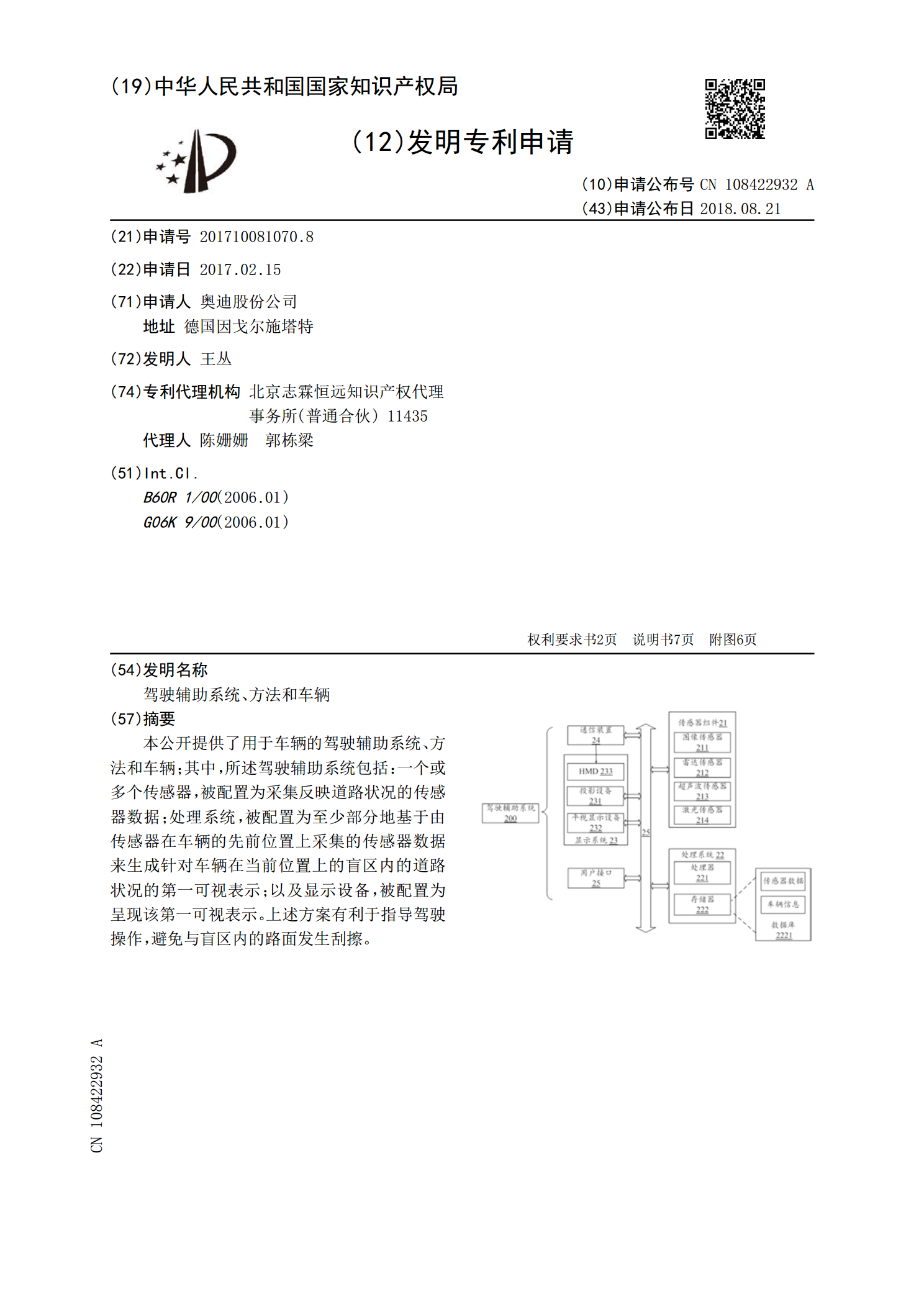
驾驶辅助系统、方法和车辆.pdf
本公开提供了用于车辆的驾驶辅助系统、方法和车辆;其中,所述驾驶辅助系统包括:一个或多个传感器,被配置为采集反映道路状况的传感器数据;处理系统,被配置为至少部分地基于由传感器在车辆的先前位置上采集的传感器数据来生成针对车辆在当前位置上的盲区内的道路状况的第一可视表示;以及显示设备,被配置为呈现该第一可视表示。上述方案有利于指导驾驶操作,避免与盲区内的路面发生刮擦。

车辆驾驶辅助的方法和系统.pdf
本发明涉及一种用于辅助车辆(5)的驾驶的方法(900)。所述方法(900)由包括HMD(10)和安装在车辆(5)上的定位模块(20)的相关系统(1)实现。特别地,所述方法(900)包括以下步骤:通过定位模块(20)检测(919)车辆位置;通过将补偿法则应用于车辆位置来确定(921)HMD(10)的位置,基于HMD(10)的位置,确定(923)对应于包括在HMD(10)的视场(FOV)中的空间的体积的视野体积(VOL);将包括在视野体积(VOL)中的一组位置与存储在系统(1)的存储器区域(31)中的与感兴趣